肩关节constant评分表
-
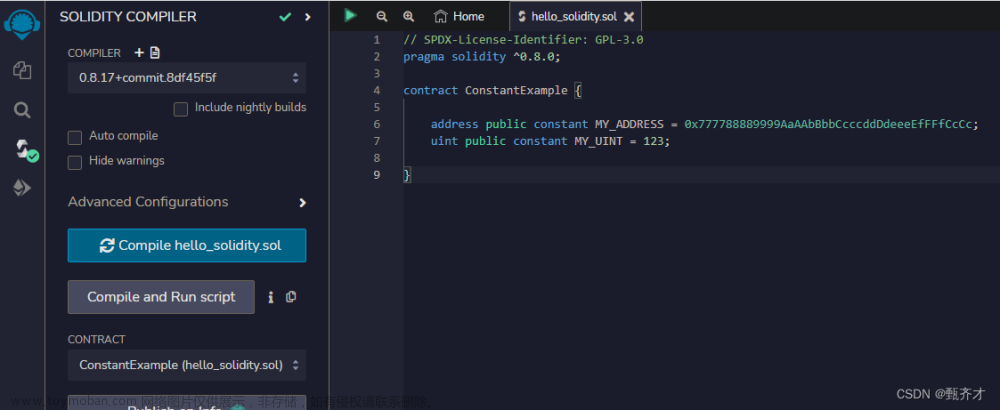
玩以太坊链上项目的必备技能(Constant 和 Immutable 状态变量-Solidity之旅十六)
constant(常量) 说到 常量 这一概念,拥有现代编程经历的您,对这一词再熟悉不过了。 常量 , 常量 ,顾名思义便是变量值始终不变,这在很多面向对象程序语言中都有。 相对 Solidity 来说,它也是支持 常量 的。 假若将 状态变量(State Vriable) 声明为 constant(常量) ,而
-
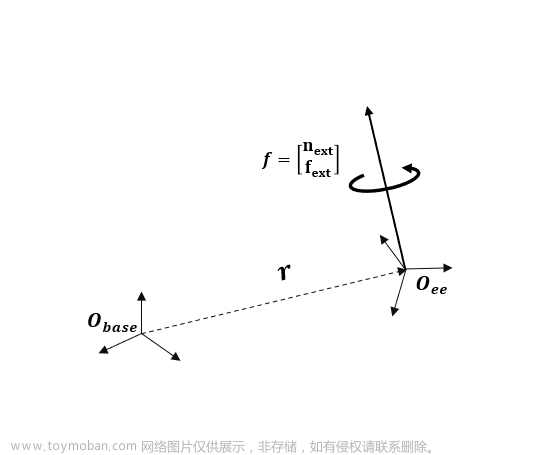
MATLAB - 计算关节扭矩以平衡端点力和力矩
产生力矩以平衡作用在平面机器人末端执行器体上的端点力。要使用各种方法计算关节力矩,请使用刚体树机器人模型的几何雅各比(geometricJacobian)和反动力学(inverseDynamics)对象函数。 双关节刚体树机器人是一个二维平面机器人。关节配置以列向量形式输出。 端点力 e
-
![elasticsearch[七]:ES评分规则详解[查询评分规则、自定义评分规则]](https://imgs.yssmx.com/Uploads/2024/01/808147-1.png)
elasticsearch[七]:ES评分规则详解[查询评分规则、自定义评分规则]
因为需要对搜索结果进行一个统一化的评分,因此需要仔细研究 ES 本身的评分规则从而想办法把评分统一。 省流:无法确切统一化 之前有说过 ES 的查询评分原理,那么仔细思考之后就会发现,长文本搜索对应的 score 会比短文本搜索的 score 高很多:score = 单个分词评分之和
-
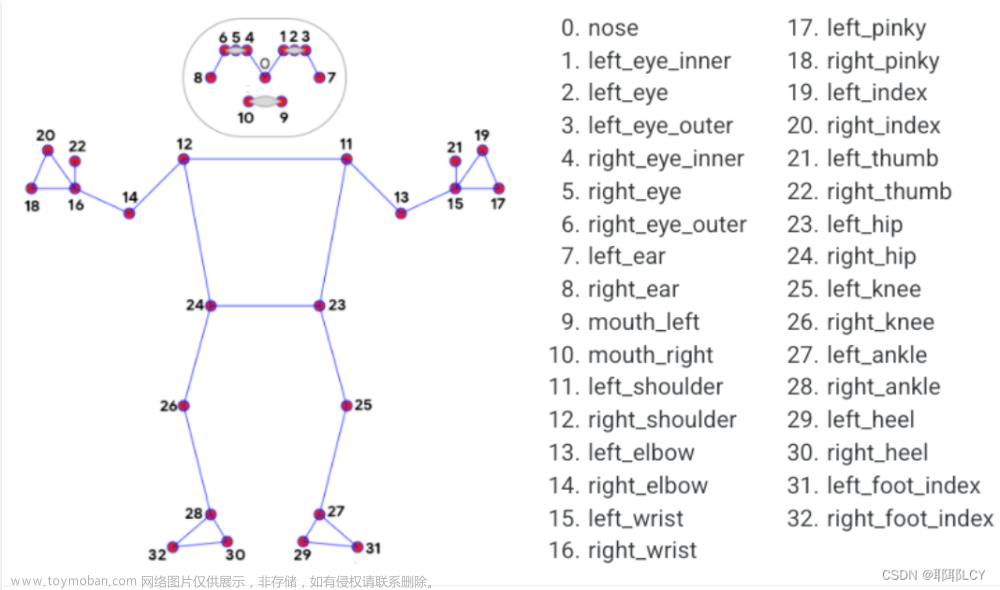
mediapipe——人体姿势关节点检测(pose模块) 学习笔记(全)
官方文档:https://google.github.io/mediapipe/ 1.1 解决方案的API,参数 API/参数 说明 STATIC_IMAGE_MOD 默认为 False ,将输入图像视为视频流。它将尝试在第一张图像中检测最突出的人,并在成功检测后进一步定位姿势地标。在随后的图像中,它只是简单地跟踪那些地标,而不会调用另一
-

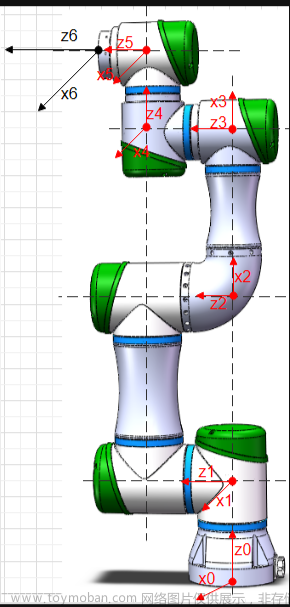
SolidWorks导出机械臂的URDF模型各个关节坐标系设置
郑重提示 :为了记录自己在学习过程中遇到的问题,所以记录了这篇博客。。在后面学习的过程中发现 之前 这篇博客记录的导出URDF模型坐标系设置方法存在一些问题,不好写DH参数表,,更更要命的是,好些朋友都收藏了这篇博客, 为了不误导大家,再次对以下内容做出修
-
基于MATLAB与SOIDWORKS的关节型六轴机械臂仿真
DH参数存在三种不同的描述。笔者在这个方面犯了一些错,所以特此记录一下。我采用的标准DH参数,不同类型的DH参数,建立的坐标系就不一样,所以需要注意一下。 标准DH参数建模的连杆坐标系是在连杆的传动轴,即连杆i的关节i+1上。由上右图可知,连杆1的驱动关节是J
-
-
yolov8的目标检测、实例分割、关节点估计的原理解析
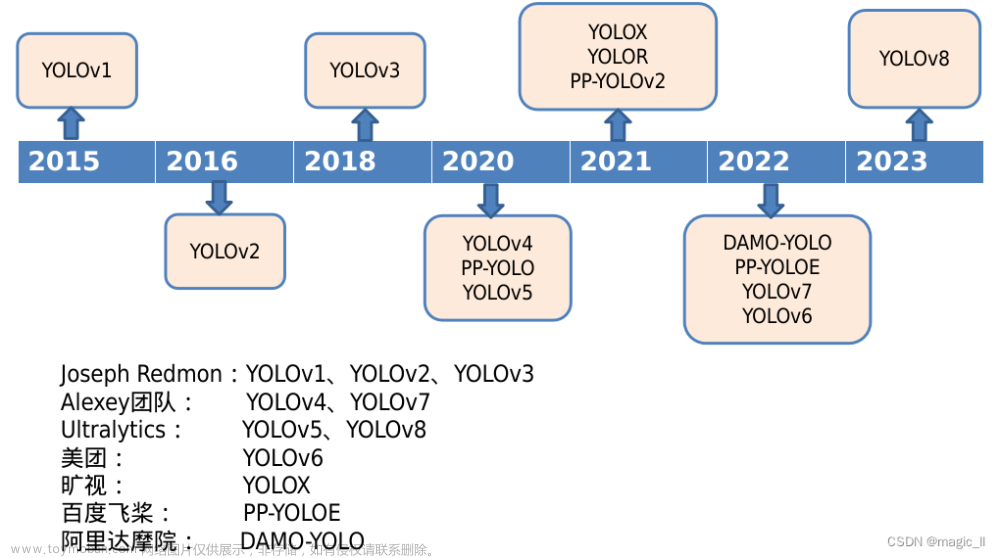
1 YOLO时间线 这里简单列下yolo的发展时间线,对每个版本的提出有个时间概念。 2 yolov8 的简介 工程链接:https://github.com/ultralytics/ultralytics 2.1 yolov8的特点 采用了anchor free方式,去除了先验设置可能不佳带来的影响 借鉴Generalized Focal Loss,使用任务解耦,分别学习box,class。并将
-
Unity3D 实现基于物理引擎的绳子关节解析详解
在游戏开发中,有时候我们需要实现绳子关节效果,比如在射击游戏中射击绳子,或者在平衡游戏中使用绳子作为支撑。本文将详细介绍如何使用Unity3D的物理引擎实现绳子关节效果。 对惹,这里有一 个游戏开发交流小组 ,希望大家可以点击进来一起交流一下开发经验呀 首
-

Robot Dynamics Lecture Notes学习笔记之关节空间动力学控制
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 目前的工业机器人几乎完全依赖于关节位置控制的概念。它们建立在PID控制器的基础上,独立调节机器人每个关节的位置或速度。这样的控制器补偿了调节器和整个机器人中的干扰,并在理想情况下导致
-

使用Actor-Critic的DDPG强化学习算法控制双关节机械臂
在本文中,我们将介绍在 Reacher 环境中训练智能代理控制双关节机械臂,这是一种使用 Unity ML-Agents 工具包开发的基于 Unity 的模拟程序。 我们的目标是高精度的到达目标位置,所以这里我们可以使用专为连续状态和动作空间设计的最先进的Deep Deterministic Policy Gradient (DDPG) 算法
-

Unity3d数字化看板-多关节机器人运动控制
在工业数字化看板中,常见的一种设备就是机械臂,也可能说是多关节的机器人,通过机械臂的各个关节旋转运动(也有机械臂的轴是伸缩),运行到指定位置,再配合夹爪和其他设备进行操作,这种时候获取的数据就是一组角度数组,需要跟模型上的各个关节进行关联,来
-
已解决java.lang.RuntimeException: java.io.IOException: invalid constant type: 18异常的正确解决方法,亲测有效!!!
已解决java.lang.RuntimeException: java.io.IOException: invalid constant type: 18异常的正确解决方法,亲测有效!!! java.lang.RuntimeException: java.io.IOException: invalid constant type: 18 ## 思路 这个错误通常出现在Java代码中使用了无效的常量类型。这可能是由于以下原因导致的: 版本不匹配:您正在
-
【ROS2机器人入门到实战】通过JointStates控制RVIZ2关节
当前平台文章汇总地址:ROS2机器人从入门到实战 获取完整教程及配套资料代码,请关注公众号鱼香ROS获取 教程配套机器人开发平台:两驱版| 四驱版 为方便交流,搭建了机器人技术问答社区:地址 fishros.org.cn 我是小鱼,本节我们来看看如何手动的发送 joint_states 来控制机器人
-
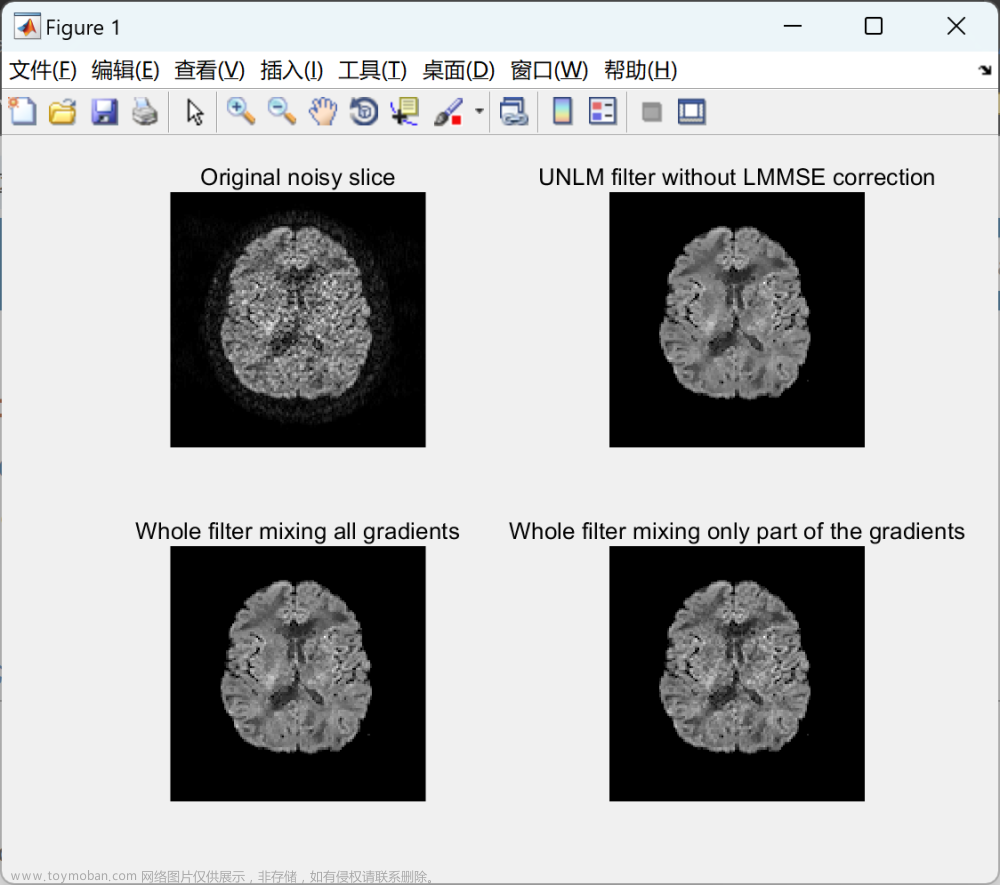
用于弥散加权MRI的关节各向异性维纳滤光片研究(Matlab代码实现)
💥💥💞💞 欢迎来到本博客 ❤️❤️💥💥 🏆博主优势: 🌞🌞🌞 博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️ 座右铭: 行百里者,半于九十。 📋📋📋 本文目录如下: 🎁🎁🎁 目录 💥1 概述 📚2 运行结果 🎉3 参考文献 🌈4 Matlab代码实现 该模块
-
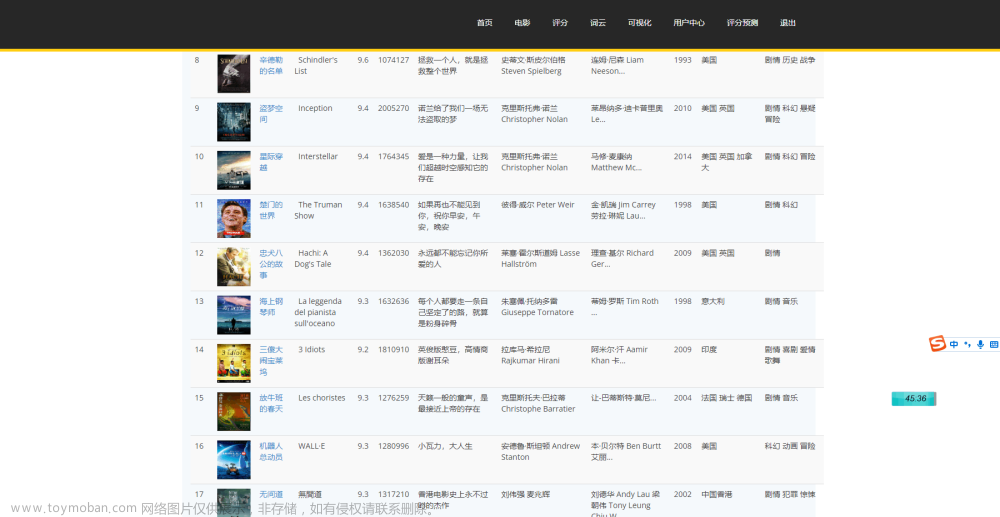
Python爬取豆瓣电影Top 250,豆瓣电影评分可视化,豆瓣电影评分预测系统
博主介绍:✌程序员徐师兄、7年大厂程序员经历。全网粉丝12w+、csdn博客专家、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战✌ 🍅 文末获取源码联系 🍅 👇🏻 精彩专栏推荐订阅👇🏻 不然下次找不到哟 2022-2024年最全的计算机软件毕业设计选
-
什么是分库分表?为什么需要分表?什么时候分库分表
不急于上手实战 ShardingSphere 框架,先来复习下分库分表的基础概念,技术名词大多晦涩难懂,不要死记硬背理解最重要,当你捅破那层窗户纸,发现其实它也就那么回事。 分库分表是在海量数据下,由于单库、表数据量过大,导致数据库性能持续下降的问题,演变出的技
-
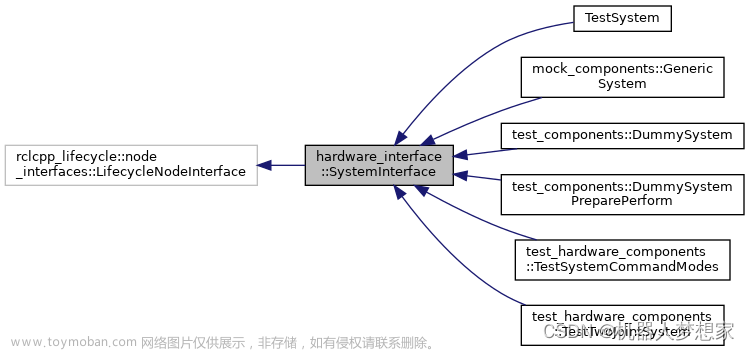
【ros2 control 机器人驱动开发】简单双关节机器人学习-example 1
【ros2 control 机器人驱动开发】简单双关节机器人学习-example 1 本系列文件主要有以下目标和内容: 为系统、传感器和执行器创建 HardwareInterface 以URDF文件的形式创建机器人描述 加载配置并使用启动文件启动机器人 控制RRBot的两个关节(两旋转关节机器人) 六自由度机器人的
-
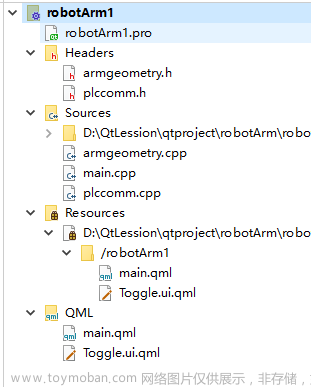
6轴关节机械手仿真和控制QtQuick3D 和 CodeSys Robotics
本工程利用QtQuick3D做上位机 ,基于CodeSys的控制器,使用 Robotics的库,进行6轴垂直机械手仿真和控制。 2.1.1程序组织 2.1.2代码 2.1.2.1 pro文件 2.1.2.2 armgeometry.h 2.1.2.3 armgeometry.cpp 2.1.2.4 plccomm.h 2.1.2.5 plccomm.cpp 2.1.2.6 main.cpp 2.1.2.7 main.qml 2.2.1 程序组织 2.2.2 程序代码 2.2.2.1 KinGroup 2.2