-
AutoSAR配置与实践:深入探讨NVM主要接口、模块交互和数据流向(详解)
深入了解AutoSAR配置中的NVM主要接口、模块交互和数据流向。探讨NVM协议栈架构、主要接口、数据操作流程等内容。
-

【AUTOSAR】 项目和代码详解(八)----AUTOSAR CANIF 配置
如下图所示,CANIF(CAN Interface)模块位于底层CAN设备驱动程序(CAN驱动和收发器驱动)和上层通信服务层(CAN状态管理器、CAN网络管理、CAN传输协议、PDU路由器)之间,它表示到上层通信层的CAN驱动程序的服务或接口。CAN接口模块提供了唯一的接口来管理不同类型的CAN硬件设
-
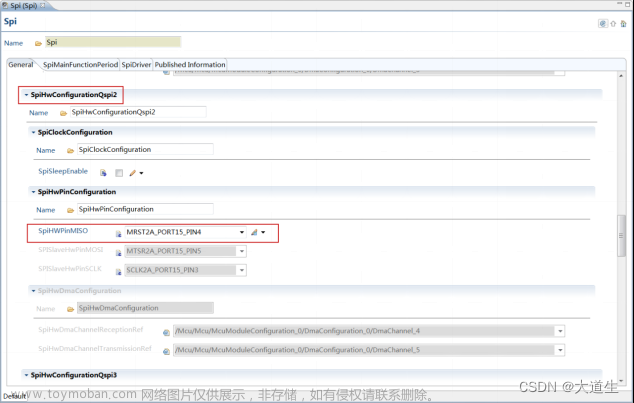
【AUTOSAR】 MCAL配置说明(三)----MCAL SPI 模块配置
SPI SPI通讯模块, 注:autosar配置工具只能做SPI的主节点配置,不能配置从节点 主要的配置内容如下: 具体使用的外设模块SPIx 映射pin 脚选择 spiChannel 配置 spiJob 配置 SpiSequence 配置 spi设备的通讯特点(通讯频率,cs有效电平,数据移位电平,片选引脚) General Configuration 常规配
-
27. AutoSAR 系列教程 | 配置 SWC & RTE之配置RTE
本篇博客内容概述: 生成 RTE 的自动代码:根据 SWC 的定义,利用工具生成 RTE 的自动代码,并将其集成到项目中。 配置 RTE 的参数:根据实际需求,配置 RTE 的各项参数,例如缓冲区大小、调度策略等。 连接 SWC 和 RTE:将 SWC 的接口与 RTE 的自动生成代码进行连接,以实现数
-
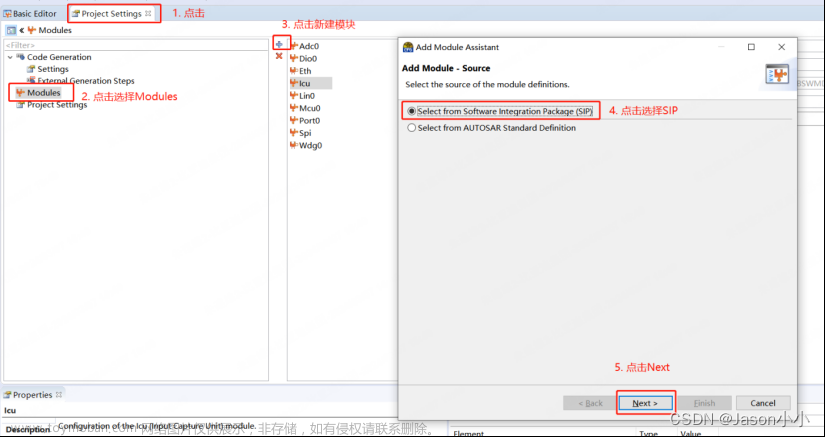
Autosar教程-Mcal教程-GPT配置教程
3.3GPT配置、生成 3.3.1 GPT配置所需要的元素 GPT实际上就是硬件定时器,需要配置的元素有: 1)定时器时钟:定时器要工作需要使能它的时钟源 2)定时器分步:时钟源进到定时器后可以通过分频后再给到定时器 定时器模块选择:MCU有多个定时器模块,需要决定使用哪个定时器模
-

Autosar MCAL MCU配置时钟-基于cfg
在Autosar OS中的Counter计数是由STM模块而来,需要在Counter中指定每个tick的 时间 ,但这个时间是根据STM时钟来的,t=1/fstm,并不是指定的时间就是 真的运行时间 ,例如指定的 Seconds per tick 时间为0.00000001,但STM频率为50000000HZ(50MHz),实际执行的时间会是0.00000002,导致os所有认为的
-
![[AutoSar]状态管理(四)单核BswM(二)流程、配置、 代码](https://imgs.yssmx.com/Uploads/2024/01/798800-1.png)
[AutoSar]状态管理(四)单核BswM(二)流程、配置、 代码
嵌入式、C语言、autosar、BswM 项目 Value OS autosar OS autosar厂商 vector 芯片厂商 TI 编程语言 C,C++ 编译器 HighTec (GCC) 回到总目录 蓝色箭头为SWC的上层交互,红色箭头为Bsw内部模块间的交互。 EcuM 初始化完毕后开始BswM初始化并调度mainfunction执行状态机。 rules :ESH_InitToWa
-
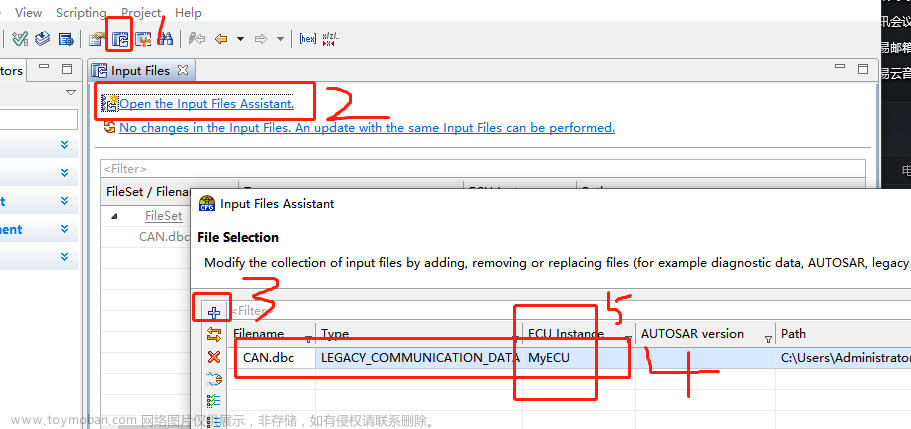
AutoSAR—Davinci CFG中CAN模块配置(上)
目录 前面 导入DBC文件 Can Controllers 通用配置 波特率配置 过滤器配置 CanHardwareObjects 最后 上篇文章介绍了一个DBC文件的诞生过程,它是AutoSAR CAN模块配置的前提。 CAN模块的配置是一块很难啃的骨头,作者也是初学,这篇文章只是给大家介绍一个CAN模块在Davinci CFG配置过程中会
-

Autosar Dcm配置-手动配置RID及Routine功能实现-基于ETAS软件
之前介绍了DID的配置,本文介绍UDS诊断中,另外一种常用的功能Routine的配置,及生成代码的使用。 Routine一般用于ECU较复杂的控制功能。使用UDS服务ID为0x31 31后面跟的是子服务,标准规定有以下几种
-

详解AUTOSAR:DaVinci Configurator导入ARXML配置(拓展篇—2)
对汽车电子技术感兴趣的小伙伴请 关注公众号:美男子玩编程 ,公众号优先推送最新技术博文,创作不易,请各位朋友多多点赞、收藏、关注支持~ 双击达芬奇工具,打开工具,如下图所示: 新建一个项目工程,点击File-New,出现如下图所示: 在Project Name:给新创建的工程
-

【AUTOSAR】 项目和代码详解(二)----RTA-OS配置
RTA-OS是一个静态可配置的、先发制人的实时操作系统用于高性能、资源受限的应用程序。RTAOS是开放标准AUTOSAR R3的完整实现。AUTOSARR4.0(含多核)、AUTOSAR R4.1、AUTOSAR R4.2、AUTOSAR R4.3操作系统规范,也完全符合版本2.2.3的OSEK/VDX操作系统的标准。OSEK现已在ISO 17356中标准化。 rtaoscfg是
-
AutoSAR(基础入门篇)7.3-使用DEV配置SWC&RTE
目录 一、实验概览 1、实验目的 2、实验内容 二、步骤一:配置SWC
-
AutoSAR配置与实践(基础篇)3.1 BSW架构和主要功能概要
-返回总目录- BSW是Basic Software的缩写,即基础软件层,为SWC提供基础软件服务, 包括标准化的系统功能以及功能接口。主要是通过分层,实现软件和硬件的隔离。从而使得整个软件的结构独立于硬件,针对不同的ECU硬件,可以通过配置的变更来满足OS和上层的需求。
-
AutoSAR配置与实践(深入篇)6.3 COM 整体架构和模块交互
-返回总目录- 一、COM层主要功能和架构(参考MICROSAR COM Technical Reference CFG5 Version 9.00.01)《TechnicalReference_Com.pdf》 1.1 COM模块的主要功能: 为上层提供信号接口(无符号/有符号) I-PDUs 中信号的打包和解包 处理传输模式 I-PDUs 间传输最小间隔 I-PDU组的通信控制 接收的deadline监控
-
AutoSAR配置与实践(深入篇)8.1 BSW的WatchDog功能(上)
-返回总目录- 此前3.6章节 ,