-
tp6中间件获取不到当前控制前名称,怎么解决?
tp6 中,中间件分为 前置 与 后置 ,在后置中设置即可,请查看以下三图:
-

STM32步进闭环控制、速度控制(张大头Emm_V4.2驱动器)速度控制 角度控制 位置控制
本文继续简述使用stm32对张大头步进电机进行速度控制和角度控制。 张大头与stm32的硬件连接请看这个 要注意哈!usart模式要先通过张大头的小屏幕进行设置的哈!!要配置好波特率和地址。这些在张大头提供的pdf说明文档里面都有写! 基础配置不说了,由于我们需要用stm32的
-
CISP——访问控制(自主访问控制和强制访问控制)
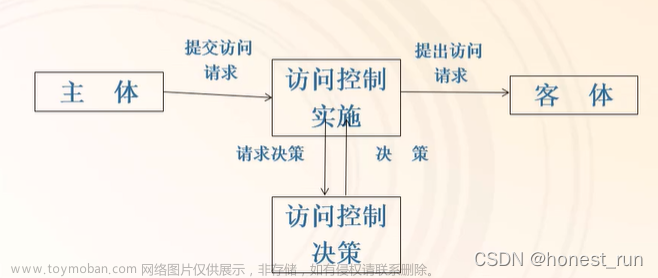
访问控制基本概念 什么是访问控制 为用户对系统资源提供最大限度共享的基础上,对用户的访问权进行管理,防止对信息的非授权篡改和滥用 访问控制作用 保证用户在系统安全策略下正常工作 拒绝非法用户的非授权访问请求 拒绝合法用户越权的服务请求 访问控制模型 :
-

【OpenAI】Python:基于 Gym-CarRacing 的自动驾驶项目(4) | 车辆控制功能的实现 | 开环控制 | 闭环控制 | 启停式控制 | PID 控制 | Stanley 控制器
猛戳!跟哥们一起玩蛇啊 👉 《一起玩蛇》🐍 💭 写在前面: 本篇是关于多伦多大学自动驾驶专业项目的博客。GYM-Box2D CarRacing 是一种在 OpenAI Gym 平台上开发和比较强化学习算法的模拟环境。它是流行的 Box2D 物理引擎的一个版本,经过修改以支持模拟汽车在赛道上
-

【OpenAI】Python:(4) 基于 Gym-CarRacing 的自动驾驶项目 | 车辆控制功能的实现 | 开环控制 | 闭环控制 | 启停式控制 | PID 控制 | Stanley 控制器
猛戳!跟哥们一起玩蛇啊 👉 《一起玩蛇》🐍 💭 写在前面: 本篇是关于多伦多大学自动驾驶专业项目的博客。GYM-Box2D CarRacing 是一种在 OpenAI Gym 平台上开发和比较强化学习算法的模拟环境。它是流行的 Box2D 物理引擎的一个版本,经过修改以支持模拟汽车在赛道上
-

《物联网控制》 第一章 自动控制与物联网控制概述
第一个自动控制系统:飞球调节器(推动了社会进步) 自动控制:是在没有人参与的情况下,系统的控制器自动地按照人预定的要求控制设备或过程,使之具有一定的状态和性能。 自动控制系统:具有自动控制功能的系统。 基本功能单元:传感器、控制器、执行器 (反馈
-

【电机应用控制】——直流无刷电机&驱动原理&有感闭环控制&无感闭环控制
目录 前言 一、概述 二、驱动原理 编辑 三、(有感)速度闭环控制 四、无感控制(无位置传感器) 四、(无感)速度闭环控制 总结 声明:学习笔记来自正点原子B站教程,仅供学习交流!! 简介: 直流无刷电机(BLDC)是指无电刷和换向器的电机,又称无
-
matlab自动控制状态反馈 设计PID控制回路、保证控制效果
1、内容简介 略 36-可以交流、咨询、答疑 2、内容说明 系统描述 已知系统的传递函数为 ,以T=0.25s对系统采样,要求: 1)设计PID控制回路,能够实现闭环系统 ,稳态误差在斜坡输入情况下为0。 理论分析 2.1 极点求解 已知闭环系统的性能要求为 , ,则系统的2个闭环极
-

【控制】自适应控制基本概念
目录 自适应控制的一点笔记和看法 1 【控制】自适应控制基本概念 2 【控制】自适应控制,对参考信号跟踪,对未知参数估计的小例子,带程序有结果图 3 【控制】自适应控制,模型参考自适应控制,公式推导,有程序有结果图 4 【控制】自适应控制,模型参考自适应控制,
-

TCP流量控制+拥塞控制
目标:流量控制主要解决的是发送方和接收方之间处理能力的不匹配问题。它的目的是确保发送方不会发送数据过快,以至于接收方无法及时接收并处理这些数据,从而避免数据包在网络中堆积和丢失。 实现方式:在TCP协议中,流量控制主要通过使用滑动窗口机制来实现。接
-

git:版本控制控制软件
Git是分布式版本控制系统,他是没有中央服务器的,每个人的电脑就像是一个完整的版本库,这样,工作的时候就不需要联网了,因为版本都是在自己的电脑上。既然每个人的电脑都有一个完整的版本库,那多个人如何协作呢?比如说自己在电脑上改了文件A,其他人也在电脑
-

TCP流量控制和拥塞控制
当发送方发送速率大于接收方的处理速率时,接收方会把数据包放入缓冲区,当缓冲区满了,就只能将数据包丢弃。为了应对这种情况,流量控制就可以大展身手了 流量控制的作用对象是发送方和接收方 当接收方网络拥塞,未能及时ACK时,导致发送方超时重传大量数据,使
-

MATLAB 模型预测控制(MPC)控制入门 —— 设计并仿真 MPC 控制器
MATLAB 模型预测控制(MPC) 模型预测控制工具箱™ 提供了用于开发模型预测控制 (MPC) 的函数、应用程序、Simulink® 模块和参考示例。对于线性问题,该工具箱支持设计隐式、显式、自适应和增益调度 MPC。对于非线性问题,您可以实现单级和多级非线性 MPC。该工具箱提供可部
-

机器人控制算法——移动机器人横向控制最优控制LQR算法
1.Introduction LQR (外文名linear quadratic regulator)即线性二次型调节器,LQR可得到状态线性反馈的最优控制规律,易于构成闭环最优控制。LQR最优控制利用廉价成本可以使原系统达到较好的性能指标(事实也可以对不稳定的系统进行整定) ,而且方法简单便于实现 ,同时利用 Matlab 强
-

TCP流量控制与拥塞控制(重要)
本文参考了一些优秀的书籍-图解TCP/IP,TCP协议卷一,小林coding,还有等等的知乎,百度. 小林coding 小林coding 知乎牛客的文章 : 万字长文 | 23 个问题 TCP 疑难杂症全解析_技术交流_牛客网 本文主要讲解TCP可靠性的机制: 流量控制与拥塞控制 尤其拥塞控制的算法是大公司非常愿