-
打家劫舍 II问题的动态规划解决方案及C++代码实现
解决打家劫舍 II问题涉及动态规划,将环形问题转化为两个单排问题。通过状态转移方程和初始化,计算可以偷窃到的最高金额。C++代码实现包括状态显示、状态转移方程、初始化、填表顺序和返回值。
-

算法学习——LeetCode力扣动态规划篇3(494. 目标和、474. 一和零、518. 零钱兑换 II)
494. 目标和 - 力扣(LeetCode) 描述 给你一个非负整数数组 nums 和一个整数 target 。 向数组中的每个整数前添加 ‘+’ 或 ‘-’ ,然后串联起所有整数,可以构造一个 表达式 : 例如,nums = [2, 1] ,可以在 2 之前添加 ‘+’ ,在 1 之前添加 ‘-’ ,然后串联起来得到表达式 “
-

力扣动态规划专题(六)编辑距离与回文问题 步骤及C++实现
步骤 确定dp数组以及下标的含义 dp[i][j] 表示以下标i-1为结尾的字符串s,和以下标j-1为结尾的字符串t,相同子序列的长度。判断s是否为t的子序列。即t的长度是大于等于s的 确定递推公式 和题1143一样,不同的是只有t可以删除元素,1143题两个字符串都可以删除元素 t中找到一
-
路径规划算法:基于鸽群优化的路径规划算法- 附代码
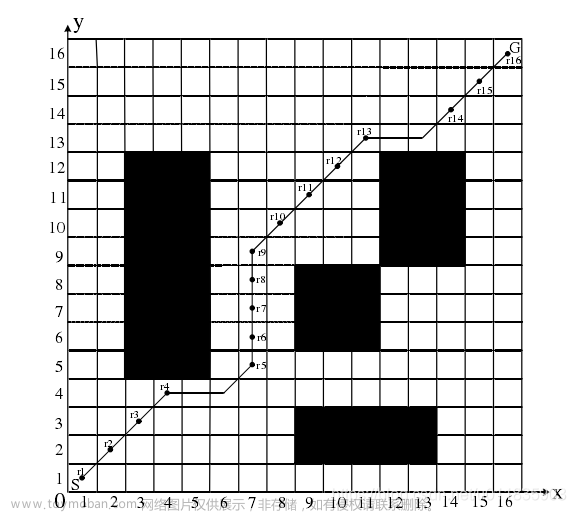
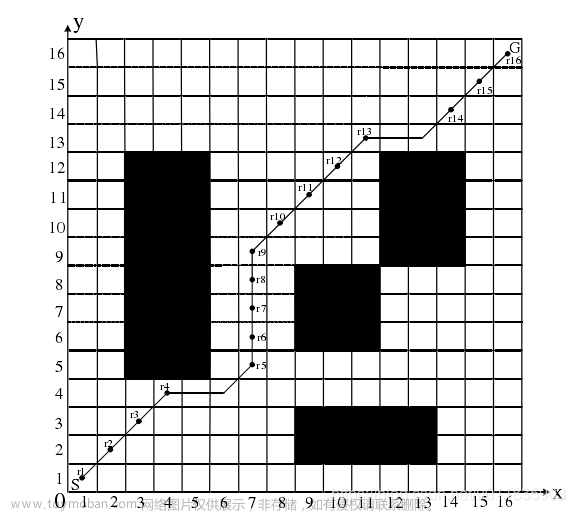
摘要:本文主要介绍利用智能优化算法鸽群算法来进行路径规划。 鸽群算法原理请参考:https://blog.csdn.net/u011835903/article/details/109774886 1.1 环境设定 在移动机器人的路径优化中,每个优化算法的解代表机器人的一条运动路径。优化算法会通过优化计算在众多路径中找出一条最
-
路径规划算法:基于和声优化的路径规划算法- 附代码
摘要:本文主要介绍利用智能优化算法和声算法来进行路径规划。 和声算法原理请参考:https://blog.csdn.net/u011835903/article/details/118724731 1.1 环境设定 在移动机器人的路径优化中,每个优化算法的解代表机器人的一条运动路径。优化算法会通过优化计算在众多路径中找出一条最
-

【路径规划】全局路径规划算法——蚁群算法(含python实现)
路径规划与轨迹跟踪系列算法 蚁群算法原理及其实现 蚁群算法详解(含例程) 图说蚁群算法(ACO)附源码 蚁群算法Python实现 蚁群算法(Ant Colony Algorithm, ACO) 于1991年首次提出,该算法模拟了自然界中蚂蚁的觅食行为。蚂蚁在寻找食物源时, 会在其经过的路径上释放一种信息
-
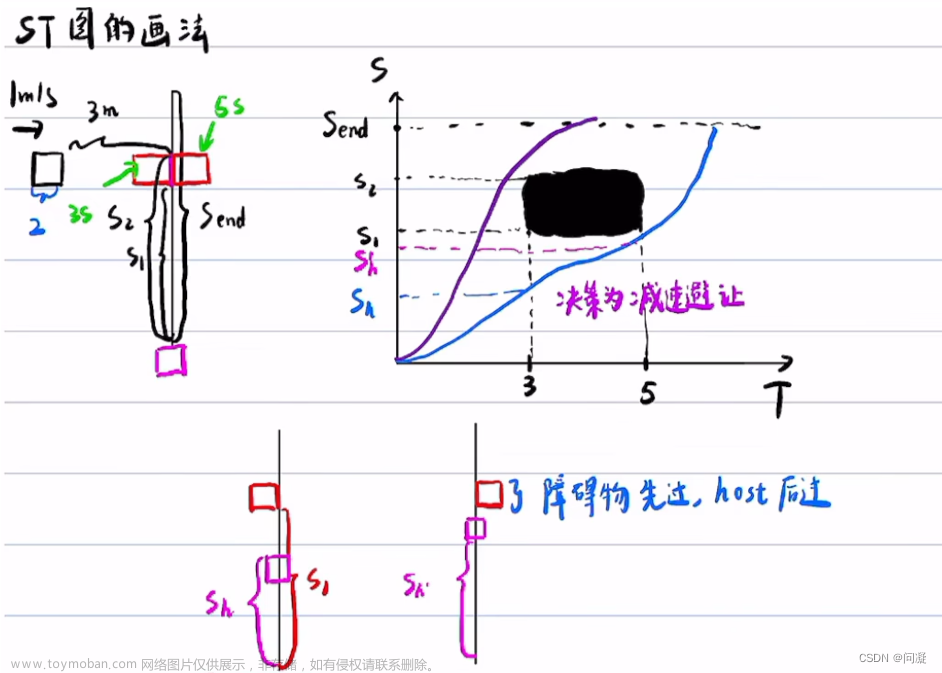
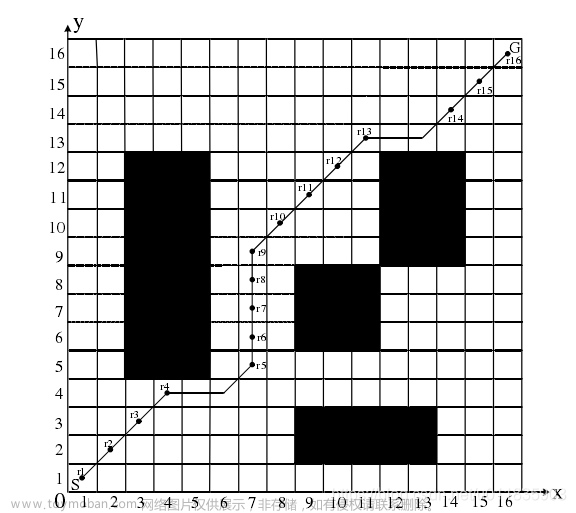
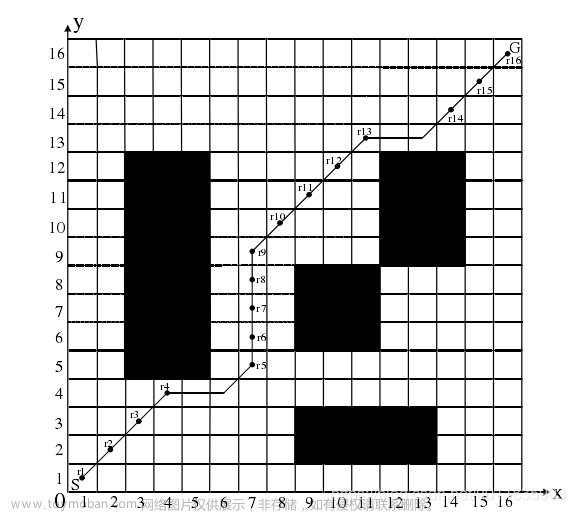
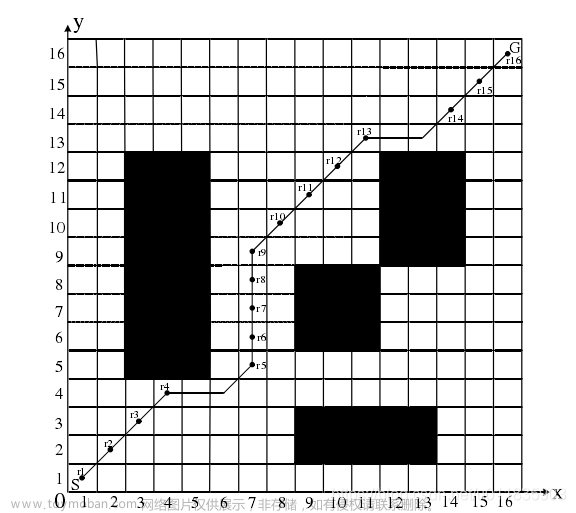
Apollo决策规划算法学习Chapter3 速度规划算法
第一章 Apollo决策规划算法基本概念 第二章 Apollo决策规划之路径规划算法 第三章 Apollo决策规划之速度规划算法 本文为第三章,主要讲解 Apollo决策规划算法中的速度规划算法,EM planner的速度规划算法同样是是通过动态规划和二次规划实现的,下面来细讲速度规划算法。 1)回
-

路径规划算法:基于蝠鲼觅食优化的路径规划算法- 附代码
摘要:本文主要介绍利用智能优化算法蝠鲼觅食算法来进行路径规划。 蝠鲼觅食算法原理请参考:https://blog.csdn.net/u011835903/article/details/112390588 1.1 环境设定 在移动机器人的路径优化中,每个优化算法的解代表机器人的一条运动路径。优化算法会通过优化计算在众多路径中找
-

路径规划算法:基于引力搜索优化的路径规划算法- 附代码
摘要:本文主要介绍利用智能优化算法引力搜索算法来进行路径规划。 引力搜索算法原理请参考:https://blog.csdn.net/u011835903/article/details/108518992 1.1 环境设定 在移动机器人的路径优化中,每个优化算法的解代表机器人的一条运动路径。优化算法会通过优化计算在众多路径中找
-
路径规划算法:基于花授粉优化的路径规划算法- 附代码
摘要:本文主要介绍利用智能优化算法花授粉算法来进行路径规划。 花授粉算法原理请参考:https://blog.csdn.net/u011835903/article/details/108346554 1.1 环境设定 在移动机器人的路径优化中,每个优化算法的解代表机器人的一条运动路径。优化算法会通过优化计算在众多路径中找出一
-
路径规划算法:基于黄金正弦优化的路径规划算法- 附代码
摘要:本文主要介绍利用智能优化算法黄金正弦算法来进行路径规划。 黄金正弦算法原理请参考:https://blog.csdn.net/u011835903/article/details/111699194 1.1 环境设定 在移动机器人的路径优化中,每个优化算法的解代表机器人的一条运动路径。优化算法会通过优化计算在众多路径中找
-

路径规划算法:基于静电放电优化的路径规划算法- 附代码
摘要:本文主要介绍利用智能优化算法静电放电算法来进行路径规划。 静电放电算法原理请参考:https://blog.csdn.net/u011835903/article/details/118755197 1.1 环境设定 在移动机器人的路径优化中,每个优化算法的解代表机器人的一条运动路径。优化算法会通过优化计算在众多路径中找
-

路径规划算法:基于平衡优化器优化的路径规划算法- 附代码
摘要:本文主要介绍利用智能优化算法平衡优化器算法来进行路径规划。 平衡优化器算法原理请参考:https://blog.csdn.net/u011835903/article/details/111388552 1.1 环境设定 在移动机器人的路径优化中,每个优化算法的解代表机器人的一条运动路径。优化算法会通过优化计算在众多路径
-

【算法】动态规划 ⑧ ( 动态规划特点 )
求解类型 : 动态规划 必须是求 最值 , 可行性 , 方案数 , 三者之一 , 如果求其它内容 , 则不能使用动态规划算法 ; 求最值 : 最大值 , 最小值 等 ; 大规模问题的结果 由 小规模问题 的计算结果 取最大值 大规模问题的结果 由 小规模问题 的计算结果 取最小值 可行性 : 是否可行
-
路径规划算法:基于适应度相关优化的路径规划算法- 附代码
摘要:本文主要介绍利用智能优化算法适应度相关算法来进行路径规划。 适应度相关算法原理请参考:https://blog.csdn.net/u011835903/article/details/119946003 1.1 环境设定 在移动机器人的路径优化中,每个优化算法的解代表机器人的一条运动路径。优化算法会通过优化计算在众多路径