-
ROS语音交互功能实现
详细介绍了如何利用科大讯飞SDK在ROS平台上实现语音交互功能,包括语音转文字和文字转语音的操作流程。
-

ros中时间的概念:ros::Time、ros::Duration、定时器ros::Timer&ros::Rate、ros::WallTime
1. ros时间格式说明 有 时刻 和 持续时长 (可以是负数),分为 秒 和 纳秒 ,换算关系:1sec=1e9nsec。Time指的是某个时刻,而Duration指的是某个时段。 2. ros::Time::now() 记录当前时刻 3. ros::Duration 代表持续的一段时间 4. toSec() 将“1
-

ROS学习-ROS简介
ROS(Robot Operating System,机器人操作系统) ROS 是一个适用于机器人的开源的元操作系统,提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、库函数、可视化、消息传递和软件包管理等诸多功能。相比于普通的OS,有着可用于异构硬件
-

【ROS】如何让ROS中节点实现数据交换Ⅰ--ROS话题通信
Halo,这里是Ppeua。平时主要更新C语言,C++,数据结构算法…感兴趣就关注我吧!你定不会失望。 roscore 启动ros核心节点 roscd 将工作空间切换到指定ros功能包 catkin_create_pkg 将工作空间切换到指定ros功能包 ** rqt_graph 启动节点间的关系图 rosrun 包名 节点名称 启动节点 ( rosrun
-
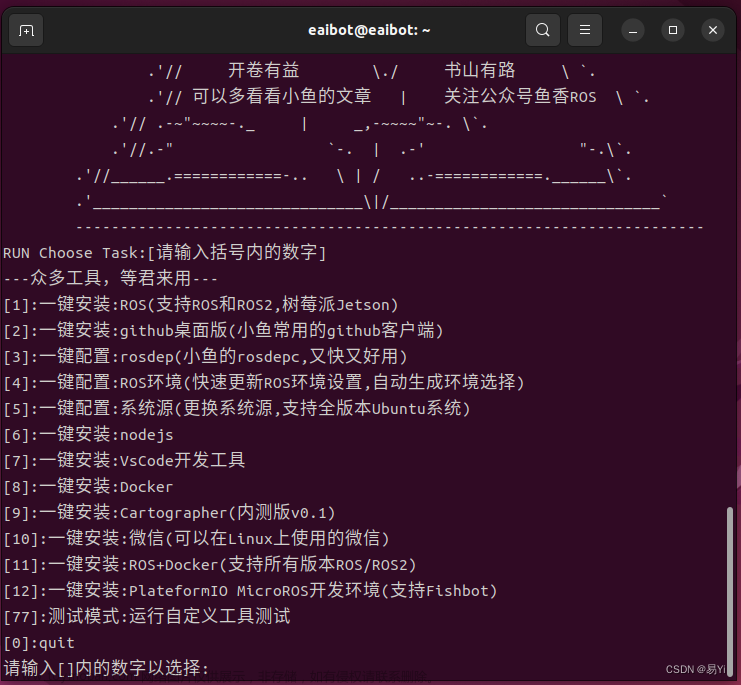
ROS篇——Ubuntu快速一键安装ROS或ROS2(通用)
以下以Ubuntu22.04安装ROS2为例(我今天新装了一个Ubuntu22.04,从0开始教你安装ROS)。 一、下载ROS安装脚本并运行 执行后如下图所示 输入数字1,回车 如果不确定自己的系统源是否可用 ,输入数字1(建议),回车 如果自己之前设置过一些第三方源,不想清除,就输入数字
-

【ROS教程】ROS常用命令
1.1.1 测试所有节点的连接状态 1.1.2 测试到某个节点的连接状态 注意 斜杠 列出活动节点列表 查看某个节点信息 1.4.1 列出所有设备 1.4.2 查看指定设备上的运行节点 1.5.1 结束所有节点进程 1.5.2 列出所有节点并选择要结束进程的那个节点 1.5.3 结束一个节点进程 清理不可连接的
-

ROS学习2:ROS通信机制
【Autolabor初级教程】ROS机器人入门 机器人操作系统 ROS 快速入门教程 1. 引言 机器人上可能集成各种传感器(雷达、摄像头、GPS等)以及运动控制实现, 为了解耦合 ,在 ROS 中 每一个功能点都是一个单独的进程 , 每一个进程都是独立运行的 。更确切的讲, ROS 是进程(也称为
-

ROS学习5:ROS常用组件
【Autolabor初级教程】ROS机器人入门 背景 现有一移动式机器人底盘,在底盘上安装了一雷达,雷达相对于底盘的偏移量已知,现雷达检测到一障碍物信息,获取到坐标分别为(x,y,z),该坐标是以雷达为参考系的,如何将这个坐标转换成以小车为参考系的坐标呢? 概念 tf:Trans
-

【ROS2机器人入门到实战】2.ROS与ROS2对比
当前平台文章汇总地址:ROS2机器人从入门到实战 获取完整教程及配套资料代码,请关注公众号鱼香ROS获取 教程配套机器人开发平台:两驱版| 四驱版 为方便交流,搭建了机器人技术问答社区:地址 fishros.org.cn 经过上一节的学习,相信你已经对ROS和ROS2的发展有了一定的了解
-
【ROS知识】比较ROS1和ROS2在处理launch的不同
在处理launch过程中,ROS1和ROS2还是有些差别的,因为文件结构不同,不能直接搬用。这里将两者建立过程做一个比对,以提升概念的清晰度。 在ROS2中,单独的launch文件是一个python文件,因此脱离ros2环境也能启动,问题是,如果launch文件添加到ros2的包内,如
-
ROS2系列(03):ROS1和ROS2的区别【01/2】
目录 1 提要 2 从架构上说 2.1 通信协议不同 2.2 架构不同 2.3 ROS2多了一个rcl
-
ROS笔记(2)——ROS的基本命令
目录 一、运行小海龟 二、常用的ROS命令 三、rosbag数据记录工具 在ROS中运行小海龟需要执行以下步骤: 打开终端并启动ROS核心:在终端中输入 \\\" roscore \\\" 并按回车键。 打开另一个终端并启动小海龟节点:在终端中输入 \\\" rosrun turtlesim turtlesim_node \\\" 并按回车键。 打开第三个终端
-

【ROS】ros导航navigation模块学习
😏 ★,° :.☆( ̄▽ ̄)/$: .°★ 😏 这篇文章主要介绍navigation导航模块学习与算法示例。 学其所用,用其所学。——梁启超 欢迎来到我的博客,一起学习,共同进步。 喜欢的朋友可以关注一下,下次更新不迷路🥞 导航模块是机器人系统中的一个重要组件,用于实现机器人在
-

【ROS】Windows系统安装ROS体验
大家平时玩ROS都是在Ubuntu系统上,那Windows系统可以安装吗,答案是:可以的!Windows为了发展自家的物联网生态,已经在Windows系统支持ROS了。 微软家的开发离不开VS,所以大家自行安装就好了。 VS 2017地址: https://visualstudio.microsoft.com/zh-hans/thank-you-downloading-visual-studio/?sku=Com
-
ROS安装:一行代码安装完成ROS
ubuntu20上安装的是noetic版本, ubuntu18上安装的是melodic版本的。 ubuntu20一行代码安装脚本如下: ubuntu18一行代码安装脚本如下: 如果报错没有curl请安装