
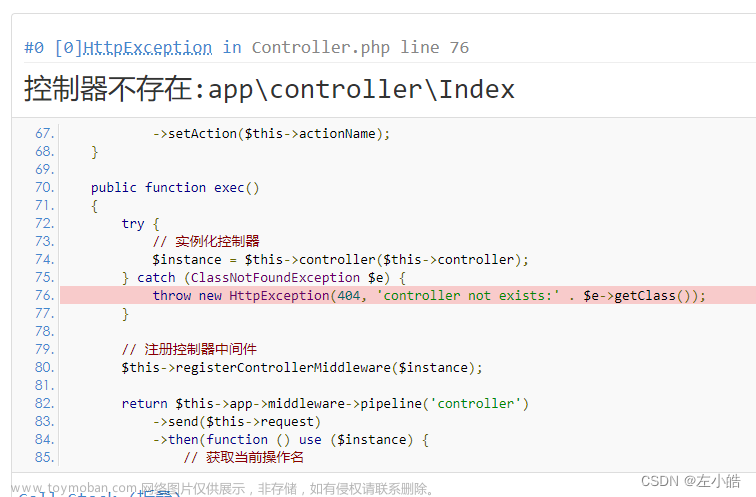
Tp6 控制器不存在:appindexcontrollerIndex
常见的解决方案: 1、查看 文件夹 和 类名 的名称是否填写正确,注意 大小写 。 2、查看 命名空间 ,大部分问题都是在命名空间, 位置 改变了命名空间也需要对应的改变。
thinkphp8.0多应用模式下提示控制器不存在
thinkphp 8.0 开启多应用模式 1、按照官方文档说明 ,已经安装了 think-multi-app composer require topthink/think-multi-app 2、控制器的命名空间也没写错。 3、访问路径与目录名、控制器、方法名一样,访问地址是没错的。 4、网上有说,在配置文件config/app.php中,将 ‘auto_multi_app’ = flase
AD域控制器将辅域控制器角色提升为主域控制器
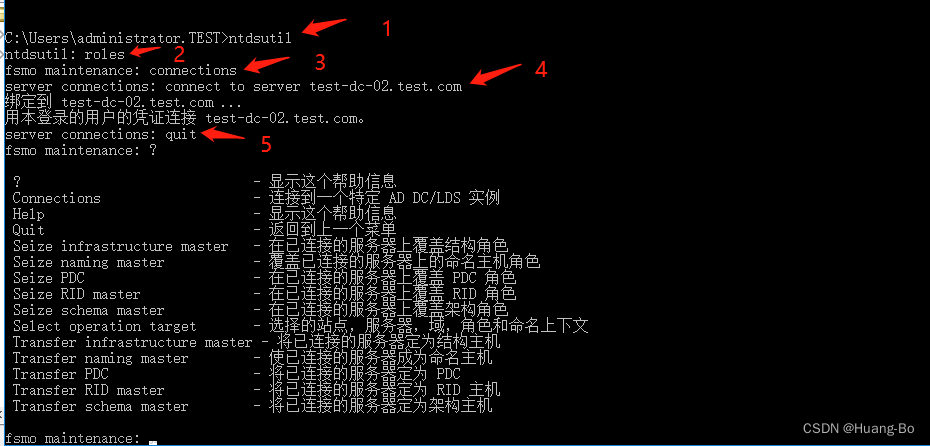
域控服务器迁移,已将新机器添加为该域的辅域控制器。 主域控制器:test-dc-01 辅域控制器:test-dc-02 需求将主辅域的角色进行互换,test-dc-01更换为辅域,test-dc-02更换为主域。 方法1 命令行修改AD域角色 1.查看当前主域控制器是哪台机器,查询命令 netdom query fsmo 可以看到当前
Unity 第三人称 玩家控制器+相机控制器
今天给大家分享一个简单的Unity第三人称视角下玩家控制器和相机控制器的脚本编写方法。 效果如下: 主要分三部分实现:人物旋转、人物移动、相机旋转。 1.人物移动: 首先获取到人物水平和垂直移动的参数: 因为人物移动的方向跟摄像头一致,所以需要根据摄像头的
18-k8s控制器资源-cronjob控制器
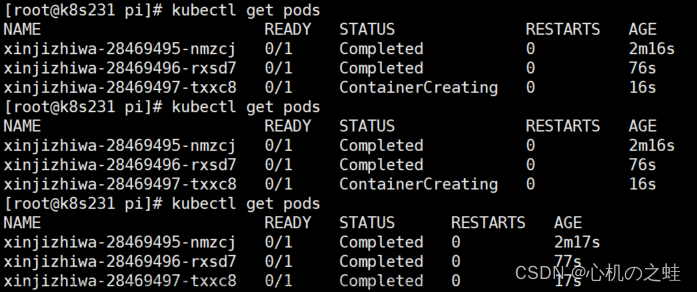
job控制器是执行完一次任务,就结束; cronjob控制器,是基于job控制器,定期频率性执行任务;等同于linux系统中的crontab一样; [root@k8s231 pi]# vim cronjob.yaml apiVersion: batch/v1 kind: CronJob metadata: name: xinjizhiwa spec: schedule: \\\"* * * * *\\\" #定义job的模板 jobTemplate

15-k8s控制器资源-deployment/部署控制器
在学习rc和rs控制器资源时,我们指导,这两个资源都是控制pod的副本数量的,但是,他们两个有个缺点,就是在部署新版本pod或者回滚代码的时候,需要先apply资源清单,然后再删除现有pod,通过资源控制,重新拉取新的pod来实现回滚或者迭代升级; 那么
14-k8s控制器资源-rs控制器replicasets
replicaset副本控制器,简称:rs控制器; 用法:与rc控制器“几乎”相同; 能力:可以指定pod的副本始终存活,相比于rc控制器;支持标签匹配,也支持标签表达式 注意:不论是rc还是rs资源,都是通过“标签”惊醒匹配pod的,如果有同样
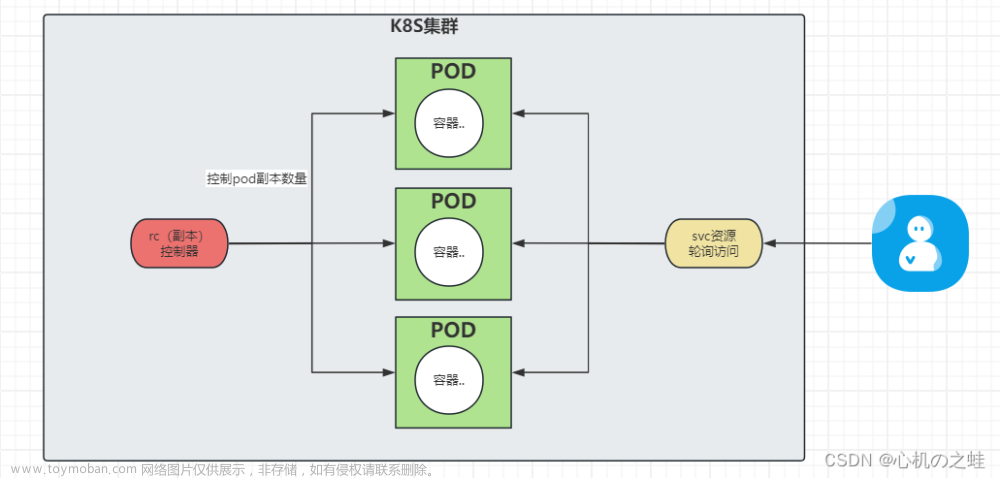
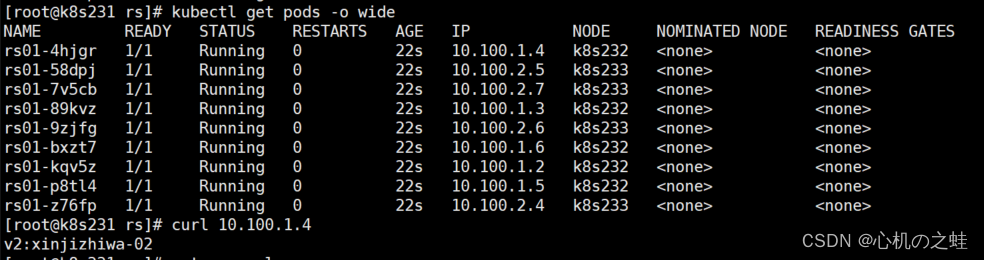
13-k8s的控制器资源-rc控制器replicationcontrollers
replicationcontrollers控制器资源,简称:rc控制器; 简单理解,rc控制器就是控制相同的pod副本数量; 使用rc控制器资源创建pod,就可以设定创建pod的数量; [root@k8s231 rc]# vim rc.yaml apiVersion: v1 kind: ReplicationController metadata: name: rc01 spec: #控制pod的副本

【进口控制器替代】基于Zynq-7020 FPGA的NI 8槽CompactRIO控制器
667 MHz双核CPU,512 MB DRAM,1 GB存储容量,Zynq-7020 FPGA,更宽工作温度范围,8槽CompactRIO控制器 cRIO-9068是一款坚固耐用的无风扇嵌入式控制器,可用于高级控制和监测应用。这款软件设计控制器搭载FPGA、运行NI Linux Real-Time操作系统的实时处理器以及嵌入式用户界面功能。cRIO-906

Spring MVC学习随笔-控制器(Controller)开发详解:控制器跳转与作用域(一)
学习视频:孙哥说SpringMVC:结合Thymeleaf,重塑你的MVC世界!|前所未有的Web开发探索之旅 3.流程跳转 在web.xml里添加Servlet然后执行 可以看到通过url拼接可以获取传递的数据 四种跳转指的是:在SpringMVC中控制器与JSP或者控制器与控制器之间的跳转。 Controller - - forward — JSP Co

自抗扰(ADRC)控制原理及控制器设计
自抗扰控制是在PID控制算法基础上进行改进的新型控制方法,它具有不依赖于控制对象模型、不区分系统内外扰的结构特点。常用的自抗扰控制器主要由 跟踪微分器 (Tracking Differentiator,TD)、 扩张状态观测器 (Extended State Observer,ESO)和 非线性状态误差反馈控制率 (Non
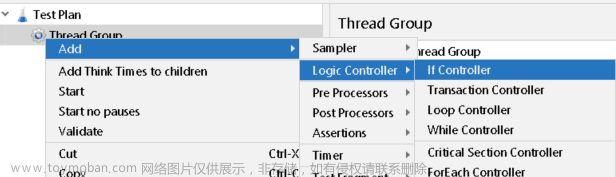
JMeter 逻辑控制之IF条件控制器
JMeter-5.4.1 添加While Controller 右键线程组-添加-逻辑控制器-While控制器 添加后,面板如下 仅Expression值为true,才会执行位于其下的操作 最好勾选(默认配置)Interpret Condition as Variable Expression?,这样Expression输入框可以有两种输入选择: 输入一个值为true 或者false的变量 比如,如果
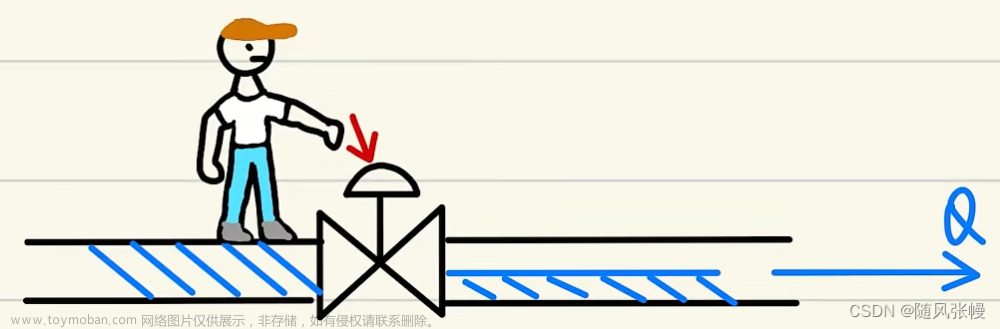
PID 控制器
本文参考: 从不懂到会用!PID从理论到实践~_哔哩哔哩_bilibili 目录 1.PID控制器入门 1.1.PID控制器的引入 1.2.PID控制器适用系统 1.3.PID控制器宏观意义 2.PID控制器的必备知识 2.1.控制系统概述 2.2.参数详解 2.3.连续与离散信号 3.PID控制算法 3.1.PID公式解释(抽象派) 3.2.PID公式解释

jmeter循环控制器
1.循环控制器 简单粗暴 写几次 循环几次 经常结合自定义变量使用 2.foreach控制器 搭配 变量一起使用的循环 一般变量的值是一个集合或者 是2个及2个以上的内容

Kubernetes 准入控制器
Kubernetes 极大地提高了当今生产中后端集群的速度和可管理性。由于灵活、可扩展、易用,Kubernetes 已成为容器编排的事实标准。Kubernetes 还提供了一系列保护功能。而 Admission Controllers(准入控制器) 是一组安全相关的插件,启用后能进一步使用 Kubernetes 更高级的安全功能。