提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
我建了一个群,分享我个人做项目的经历和资源,纯个人爱好,一切免费,看自己空闲时间答疑,有想法的可以加QQ群280730348
前言
本篇文章是对单相逆变电路进行实战演练的一次项目,主要实现功能为:
直流电压48V输入,通过STM32F103C8T6单片机输出SPWM波,通过IR2104S驱动模块控制两组对管的开关闭合,通过LCL滤波实现工频正弦波的平滑输出。额定输出电压为24V,额定输出电流为2A,额定输出功率为48W,适合对逆变电路感兴趣的朋友实战演练。
实物图如下:
一、所需要的主要器件
1、STM32F103C8T6开发板一块
2、0.96寸OLED屏幕一块
3、IRF540N(MOSFET管)四个
4、1mh铁铝硅电感33MM
5、MKP电容10uf(圆柱形)
6、两个IR2104驱动模块
7、交流电计量模块HLW8032
二、硬件电路图
1.单相逆变主电路
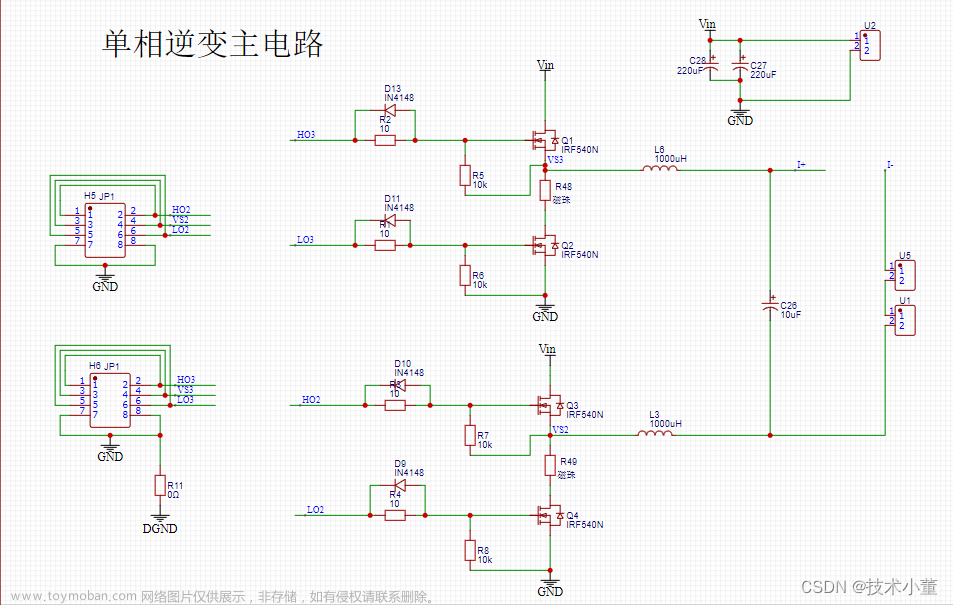
主要原理为:HO3、LO3为IR2104S驱动模块1驱动,HO2、LO2为IR2104S驱动模块2驱动。在任一瞬间,HO3和LO3波形相反,HO2与LO2波形相反,且HO3和HO2波形相反。即整体电路只对应两种工作状态:
第一种工作状态为:直流电流通过Q1mos管流经L6,负载L3再流经Q4最终到达地,在这一工作状态里,若负载上端视为电压正极,则负载上会加上一个正向的电压,也即处于正弦波的正半周期。
第二种工作状态为:直流电流通过Q3mos管流经L3,负载L6再流经Q2最终到达地,在这一工作状态里,若负载上端视为电压正极,则负载上会加上一个反向的电压,也即处于正弦波的负半周期。
2.继电器过流过压保护

CTRL为单片机控制继电器开关闭合的信号,I+和I-分别连至逆变电路的输出和负载的上端。若CTRL给低电平,9013关闭,继电器磁铁不吸合,I+和I-处于连接状态。若CTRL给高电平,则9013导通,继电器磁铁吸合,I-和FLOAT处于连接状态,电路输出浮空,起到保护作用。
3.辅助电源供电
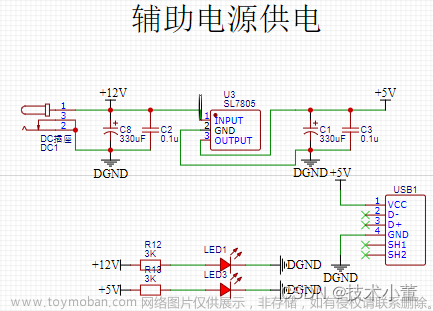
12V电源适配器输入,通过7805降压至5V,给单片机和总体供电。
4.IR2104驱动

芯片输入口主要有四个信号,一个是12V的供电信号,一个是PWM的驱动信号,一个是5V的芯片使能信号,另外一个是数字地。输出口同样有四个信号,分别为HO,VS,LO和模拟地。本驱动的功能是,输入一路PWM信号,在HO和LO口得到互补的PWM波,VS接在对管MOSFET的中间,即上管的S端和下管的D端,利用自举驱动原理驱动上管开关闭合。
三、软件流程图
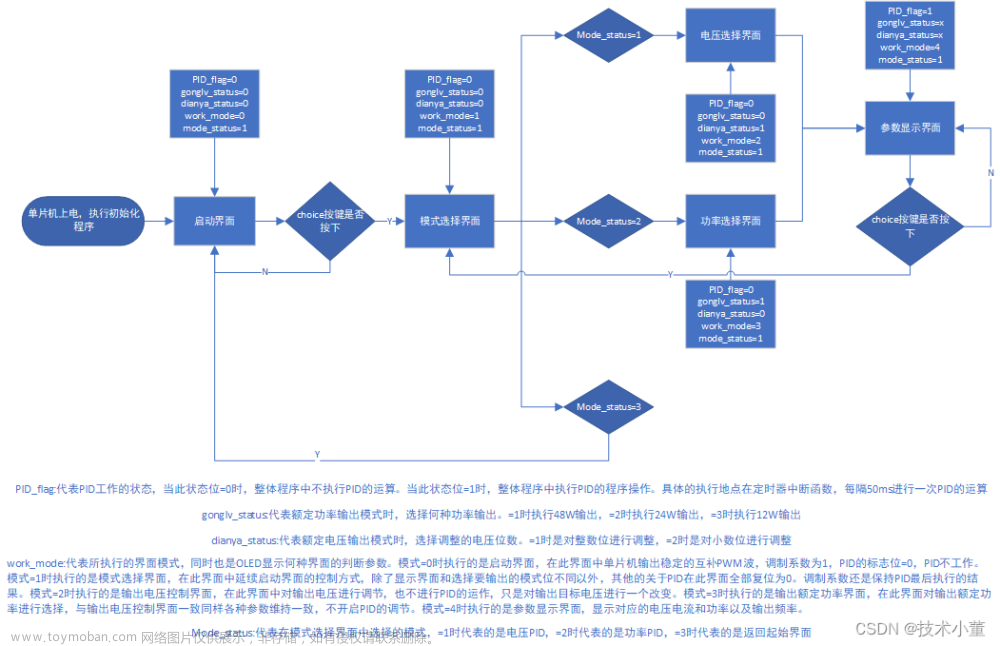
1.Visio流程图
2.主函数
代码如下(示例):
/*
STM32F103C8T6
iic通信0.96寸OLED显示屏;显示中英文、数字、图片
18B20温度传感器
HC-SR04超声波传感器
OLED接线定义:
VCC--3.3V/5V
GND--GND
SCL--PB8
SDA--PB9
*/
#include "stm32f10x.h"
#include <stdbool.h>
#include "string.h"
#include "sys.h"
#include "delay.h"
#include "oled.h"
#include "stdio.h"
#include "timer.h"
#include "usart.h"
#include "usart2.h"
#include "led.h"
#include "show.h"
#include "main.h"
#include "pid.h"
#include "key.h"
float jiaozheng=1.0023f;
/*电能数据采集参量设置*/
extern u32 Voltage_Parameter_Reg,Voltage_Reg,Current_Reg,Current_Parameter_Reg,Power_Parameter_Reg,Power_Reg;
extern u8 Data_Updata_Reg;
extern u16 PF_Reg;
float ACVotage,ACCurrent,ActivePower,ApparentPower,PowerFactor,ElectricEnergy;
u8 Pre_Data_Updata_Reg;
u16 UpdataCount;
u32 PFCount,PF_OneDegree;
u8 buf[5]={11,12,12,12,12};
/*实际电路运行中需要用到的一些电路参数*/
u8 gonglv_status=1; //功率状态标志位,为1时是额定48W输出,为2时是额定24W输出,为3时是额定12W输出
u8 dianya_status=1; //电压状态标志位,为1时是调节整数位输出,为2时是调节小数位输出
u8 work_mode=0; //工作模式为0,代表启动界面;工作模式为1,代表模式选择界面;
u8 mode_status=1; //=1代表指向额定电压输出,=2代表指向额定功率输出,=3代表指向初始启动界面
u8 key_value=0; //按键键值,1-4分别代表control,choice,add,reduce
float duty=1000.0f; //逆变电路的调制系数
float AC_Target=240.0f; //逆变电路输出目标值
float gonglv_Target=232.0f; //功率追踪位
float PID_flag=0; //PID使能控制位
float kp_v=0.04; //P环调节系数
float kp_p=0.04;
float dianzu=11.20f;
/*第一次进入界面使能*/
u8 mode_1=0;
u8 mode_2=0;
u8 mode_3=0;
u8 mode_4=0;
int main(void)
{
u16 i=0;
u8 x=0,y=0;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组为组2:2位抢占优先级,2位响应优先级
delay_init(); //延时
uart_init(9600); //串口初始化
uart2_init(4800); //串口初始化为115200
TIM3_Int_Init(3600-1,1-1);//10KHZ
TIM4_Int_Init(3600-1,2-1);//10KHZ
BOOST_PWM_Init();
LED_Init(); //LED初始化
KEY_Init();
init_PID(); //初始化PID参数
OLED_Init(); //初始化OLED
OLED_Clear();
loop:
GPIO_SetBits(GPIOB,GPIO_Pin_5); //关闭继电器
qidong_view();
TIM_Cmd(TIM1,DISABLE);
PID_flag=0;
duty=0;
AC_Target=240.0f;
while(1)
{
key_value=KEY_Scan(0);
if(key_value==1)
{
work_mode=1;
TIM_Cmd(TIM1,ENABLE);
GPIO_ResetBits(GPIOB,GPIO_Pin_5);
for(i=1;i<=1000;i++)
{
duty=i;
delay_ms(1);
}
break;
}
}
choice_view();
while(1)
{
key_value=KEY_Scan(0);//扫描键值
/*选择初始界面函数*/
if(work_mode==0)
{
goto loop;
}
/*选择界面处理函数*/
else if(work_mode==1)
{
if(mode_1==0)choice_view(),mode_1=1,PID_flag=0,duty=600;
if(key_value==2)
{
mode_status+=1;
if(mode_status==4)
{
mode_status=1;
}
}
else if(key_value==1)
{
mode_1=0;
if(mode_status==1)work_mode=2;
else if(mode_status==2)work_mode=3;
else if(mode_status==3)work_mode=0;
}
if(mode_status==1)
{
OLED_ShowString(90,2,"<-",16);
OLED_ShowString(90,4," ",16);
OLED_ShowString(90,6," ",16);
}
else if(mode_status==2)
{
OLED_ShowString(90,2," ",16);
OLED_ShowString(90,4,"<-",16);
OLED_ShowString(90,6," ",16);
}
else if(mode_status==3)
{
OLED_ShowString(90,2," ",16);
OLED_ShowString(90,4," ",16);
OLED_ShowString(90,6,"<-",16);
}
}
/*选择电压界面处理函数*/
else if(work_mode==2)
{
if(mode_2==0)dianya_view(),mode_2=1;
if(key_value==2)
{
dianya_status+=1;
if(dianya_status==3)
{
dianya_status=1;
}
}
else if(key_value==1)
{
mode_2=0;
PID_flag=1;
work_mode=4;
}
else if(key_value==4&&dianya_status==1)
{
AC_Target+=10;
}
else if(key_value==4&&dianya_status==2)
{
AC_Target+=1;
}
else if(key_value==3&&dianya_status==1)
{
AC_Target-=10;
}
else if(key_value==3&&dianya_status==2)
{
AC_Target-=1;
}
if(dianya_status==1)
{
OLED_ShowString(90,2,"<-",16);
OLED_ShowString(90,4," ",16);
}
else if(dianya_status==2)
{
OLED_ShowString(90,2," ",16);
OLED_ShowString(90,4,"<-",16);
}
OLED_ShowNum(56,2,(int)AC_Target/10,2,16);
OLED_ShowNum(56,4,(int)AC_Target%10,1,16);
OLED_ShowNum(56,6,(int)AC_Target/10,2,16);OLED_ShowNum(80,6,(int)AC_Target%10,1,16);
}
/*选择功率界面处理函数*/
else if(work_mode==3)
{
if(mode_3==0)gonglv_view(),mode_3=1;
if(key_value==2)
{
gonglv_status+=1;
// if(gonglv_status==3)
// {
// gonglv_status=1;
// }
if(gonglv_status==4)
{
gonglv_status=1;
}
}
else if(key_value==1)
{
mode_3=0;
PID_flag=1;
work_mode=4;
if(gonglv_status==1)gonglv_Target=232.0f;
else if(gonglv_status==2)gonglv_Target=164.0f;
else if(gonglv_status==3)gonglv_Target=116.0f;
}
// else if(key_value==4&&gonglv_status==1)
// {
// gonglv_Target+=10;
// }
// else if(key_value==4&&gonglv_status==2)
// {
// gonglv_Target+=1;
// }
// else if(key_value==3&&gonglv_status==1)
// {
// gonglv_Target-=10;
// }
// else if(key_value==3&&gonglv_status==2)
// {
// gonglv_Target-=1;
// }
// if(gonglv_status==1)
// {
// OLED_ShowString(90,2,"<-",16);
// OLED_ShowString(90,4," ",16);
// }
// else if(gonglv_status==2)
// {
// OLED_ShowString(90,2," ",16);
// OLED_ShowString(90,4,"<-",16);
// }
// OLED_ShowNum(56,2,(int)gonglv_Target/10,2,16);
// OLED_ShowNum(56,4,(int)gonglv_Target%10,1,16);
// OLED_ShowNum(56,6,(int)gonglv_Target/10,2,16);OLED_ShowNum(80,6,(int)gonglv_Target%10,1,16);
if(gonglv_status==1)
{
OLED_ShowString(90,2,"<-",16);
OLED_ShowString(90,4," ",16);
OLED_ShowString(90,6," ",16);
}
else if(gonglv_status==2)
{
OLED_ShowString(90,2," ",16);
OLED_ShowString(90,4,"<-",16);
OLED_ShowString(90,6," ",16);
}
else if(gonglv_status==3)
{
OLED_ShowString(90,2," ",16);
OLED_ShowString(90,4," ",16);
OLED_ShowString(90,6,"<-",16);
}
}
/*参数选择界面*/
else if(work_mode==4)
{
if(mode_4==0)canshu_view(),mode_4=1;
if(key_value==1)
{
mode_4=0;
PID_flag=0;
work_mode=1;
}
/*显示电压电流数据*/
OLED_ShowNum(40,0,(u32)(ACVotage*100)/100,2,16);
OLED_ShowNum(64,0,(u32)(ACVotage*100)%100,2,16);
OLED_ShowNum(40,2,(u32)(ACCurrent*100)/100,2,16);
OLED_ShowNum(64,2,(u32)(ACCurrent*100)%100,2,16);
OLED_ShowNum(40,4,(u32)(ApparentPower*10)/10,3,16);
OLED_ShowNum(72,4,(u32)(ApparentPower*10)%10,1,16);
}
ACVotage=(Voltage_Parameter_Reg*1.88/Voltage_Reg)*jiaozheng;//电压有效值
if(ACVotage<=2)
ACVotage=0;
ACCurrent=(Current_Parameter_Reg*1.0/Current_Reg)*0.4893;//电流有效值
if(ACCurrent<0.1)//无电压时电压又飘移
{
ACCurrent=0;
ApparentPower=0;
ActivePower=0;
PowerFactor=0;
}
if(ACVotage>2&&ACCurrent>0.1)//空载时电流有飘移
{
ApparentPower=ACVotage*ACCurrent;//视在功率
ActivePower=Power_Parameter_Reg*1.88/Power_Reg;//有功功率
PowerFactor=ActivePower/ApparentPower;//功率因数
}
printf ("电压有效值:%f\r\n",ACVotage);
printf ("电流有效值:%f\r\n",ACCurrent);
printf ("视在功率:%f\r\n",ApparentPower);
printf ("有功功率:%f\r\n",ActivePower);
printf ("功率因数:%f\r\n",PowerFactor);
if(Pre_Data_Updata_Reg!=(Data_Updata_Reg&0x80))
{
UpdataCount++;
Pre_Data_Updata_Reg=Data_Updata_Reg&0x80;
}
PFCount=UpdataCount*65536+PF_Reg;//脉冲信号个数
PF_OneDegree=1000000000/Power_Parameter_Reg;
PF_OneDegree=PF_OneDegree*3600/1.88;//1度电对应的脉冲个数;
ElectricEnergy=(float)PFCount/(float)PF_OneDegree;//电能
printf ("电能:%f\r\n",ElectricEnergy);
delay_ms(50);
}
主代码里面主要是对于界面的显示和模式的切换,以及处理交流电压和交流电流等参数数据。
3.定时器中断函数
#include "timer.h"
#include "inverter.h"
#include "main.h"
#include "pid.h"
#include "usart.h"
#include "string.h"
#define BOOST_TIMx TIM1
#define BOOST_Plus 0//初始化占空比为0.5%,高电平有效时的低电平占空比
#define BOOST_ARR (3600-1)//重装载值1000
#define BOOST_PSC (1-1)//分频系数2
void BOOST_PWM_Init(void)//boost电路输出互补PWM波形(PA8、PB13)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_BDTRInitTypeDef TIM_BDTRInitStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB|RCC_APB2Periph_AFIO,ENABLE); //使能PORTA,B时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE);
//初始化GPIO,PA8
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;//端口复用
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_8;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure); //PA8
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_13;
GPIO_Init(GPIOB,&GPIO_InitStructure);//PB13
//初始化时具单元
TIM_DeInit(BOOST_TIMx);
TIM_TimeBaseInitStruct.TIM_ClockDivision=0;
TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInitStruct.TIM_Period=BOOST_ARR;
TIM_TimeBaseInitStruct.TIM_Prescaler=BOOST_PSC;
TIM_TimeBaseInit(BOOST_TIMx,&TIM_TimeBaseInitStruct);
//将输出通道2初始化为PWM模式1
TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitStruct.TIM_OutputState=TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_OutputNState=TIM_OutputNState_Enable;
TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_High;
TIM_OCInitStruct.TIM_OCNPolarity=TIM_OCNPolarity_High;
TIM_OCInitStruct.TIM_OCIdleState=TIM_OCIdleState_Set;
TIM_OCInitStruct.TIM_OCNIdleState=TIM_OCNIdleState_Reset;
TIM_OCInitStruct.TIM_Pulse=BOOST_Plus;
TIM_OC1Init(BOOST_TIMx,&TIM_OCInitStruct);
//使能预装载寄存器
TIM_OC1PreloadConfig(BOOST_TIMx,TIM_OCPreload_Enable);
//死区和刹车功能配置
TIM_BDTRInitStruct.TIM_OSSIState=TIM_OSSIState_Disable;
TIM_BDTRInitStruct.TIM_OSSRState=TIM_OSSRState_Disable;
TIM_BDTRInitStruct.TIM_LOCKLevel=TIM_LOCKLevel_1;
TIM_BDTRInitStruct.TIM_DeadTime=0; //40.92ns
TIM_BDTRInitStruct.TIM_BreakPolarity=TIM_BreakPolarity_Low;
TIM_BDTRInitStruct.TIM_Break=TIM_Break_Disable;
TIM_BDTRInitStruct.TIM_AutomaticOutput=TIM_AutomaticOutput_Enable;
TIM_BDTRConfig(BOOST_TIMx,&TIM_BDTRInitStruct);
//使能自动重装载
TIM_ARRPreloadConfig(BOOST_TIMx,ENABLE);
//开启定时器
TIM_Cmd(BOOST_TIMx,DISABLE);
//主输出使能
TIM_CtrlPWMOutputs(BOOST_TIMx,ENABLE);
}
//定时器7中断服务程序
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET)//是更新中断
{
TIM_ClearITPendingBit(TIM2, TIM_IT_Update ); //清除TIM7更新中断标志
TIM_Cmd(TIM2, DISABLE); //关闭TIM7
}
}
void TIM2_Int_Init(u16 arr,u16 psc)
{
NVIC_InitTypeDef NVIC_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);//TIM7时钟使能
//定时器TIM7初始化
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE ); //使能指定的TIM7中断,允许更新中断
TIM_Cmd(TIM2,ENABLE);//开启定时器7
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0 ;//抢占优先级0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //子优先级2
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
}
void TIM3_IRQHandler(void)
{
static u16 jishu=0;
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET)//是更新中断
{
inverter_spwm();
if(jishu==400)
{
jishu=0;
if(PID_flag==1)
{
if(mode_status==1)duty=PID_X(ACVotage*10,AC_Target,kp_v,2,1200);
else if(mode_status==2)duty=PID_X(ACVotage*10,gonglv_Target,kp_p,2,1200);
//else if(mode_status==2)duty=PID_X(ACVotage*10,sqrt((gonglv_Target/10)*11.2)*10,kp_p,2,1200);
}
}
jishu++;
TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清除TIM7更新中断标志
}
}
void TIM3_Int_Init(u16 arr,u16 psc)
{
NVIC_InitTypeDef NVIC_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);//TIM3时钟使能
//定时器TIM7初始化
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断
TIM_Cmd(TIM3,ENABLE);//开启定时器3
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0 ;//抢占优先级0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
}
void TIM4_IRQHandler(void)
{
if (TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET)//是更新中断
{
TIM_ClearITPendingBit(TIM4, TIM_IT_Update ); //清除TIM7更新中断标志
}
}
void TIM4_Int_Init(u16 arr,u16 psc)
{
NVIC_InitTypeDef NVIC_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);//TIM3时钟使能
//定时器TIM7初始化
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位
TIM_ITConfig(TIM4,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断
TIM_Cmd(TIM4,ENABLE);//开启定时器3
NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1 ;//抢占优先级0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
}
/*选择通道函数*/
void set_pwm(TIM_TypeDef* TIMx,u8 chx,u16 prec,u16 up)
{
//判断输入参数是否正确
if(chx<1||chx>4)
return;
if(prec>up)
prec=up;
//根据输入的通道设置PWM占空比
switch(chx)
{
case 1:TIM_SetCompare1(TIMx,prec);break;
case 2:TIM_SetCompare2(TIMx,prec);break;
case 3:TIM_SetCompare3(TIMx,prec);break;
case 4:TIM_SetCompare4(TIMx,prec);break;
}
}
定时器一主要是用来输出互补的PWM波,定时器二和定时器四无明显作用,定时器三主要是控制SPWM波的生成以及进行PID运算。定时器三时钟频率为20KHz,在其中断里面定义了一个暂态变量,每进入400次中断循环复位一次,这样没执行一次中断改变一次PWM的占空比,即可实现SPWM波的生成。PID由于我们的信号采集模块每隔50ms发一次数据,所以选择50Hz的频率进行一次PID的运算。
4.逆变器SPWM函数
#include "inverter.h"
#include "timer.h"
#include "main.h"
#define length 400
u16 sinData[length]=
{
1800,1821,1842,1864,1885,1906,1927,1949,1970,1991,2012,2033,2054,2075,2096,2117,
2137,2158,2179,2199,2219,2240,2260,2280,2300,2320,2339,2359,2378,2397,2416,2435,
2454,2473,2491,2510,2528,2546,2563,2581,2598,2615,2632,2649,2666,2682,2698,2714,
2730,2745,2760,2775,2790,2805,2819,2833,2847,2860,2873,2886,2899,2911,2924,2935,
2947,2958,2969,2980,2990,3001,3010,3020,3029,3038,3047,3055,3063,3071,3078,3085,
3092,3098,3105,3110,3116,3121,3126,3130,3134,3138,3142,3145,3148,3150,3152,3154,
3156,3157,3158,3158,3159,3158,3158,3157,3156,3154,3152,3150,3148,3145,3142,3138,
3134,3130,3126,3121,3116,3110,3105,3098,3092,3085,3078,3071,3063,3055,3047,3038,
3029,3020,3010,3001,2990,2980,2969,2958,2947,2935,2924,2911,2899,2886,2873,2860,
2847,2833,2819,2805,2790,2775,2760,2745,2730,2714,2698,2682,2666,2649,2632,2615,
2598,2581,2563,2546,2528,2510,2491,2473,2454,2435,2416,2397,2378,2359,2339,2320,
2300,2280,2260,2240,2219,2199,2179,2158,2137,2117,2096,2075,2054,2033,2012,1991,
1970,1949,1927,1906,1885,1864,1842,1821,1800,1778,1757,1735,1714,1693,1672,1650,
1629,1608,1587,1566,1545,1524,1503,1482,1462,1441,1420,1400,1380,1359,1339,1319,
1299,1279,1260,1240,1221,1202,1183,1164,1145,1126,1108,1089,1071,1053,1036,1018,
1001,984,967,950,933,917,901,885,869,854,839,824,809,794,780,766,
752,739,726,713,700,688,675,664,652,641,630,619,609,598,589,579,
570,561,552,544,536,528,521,514,507,501,494,489,483,478,473,469,
465,461,457,454,451,449,447,445,443,442,441,441,441,441,441,442,
443,445,447,449,451,454,457,461,465,469,473,478,483,489,494,501,
507,514,521,528,536,544,552,561,570,579,589,598,609,619,630,641,
652,664,675,688,700,713,726,739,752,766,780,794,809,824,839,854,
869,885,901,917,933,950,967,984,1001,1018,1036,1053,1071,1089,1108,1126,
1145,1164,1183,1202,1221,1240,1260,1279,1299,1319,1339,1359,1380,1400,1420,1441,
1462,1482,1503,1524,1545,1566,1587,1608,1629,1650,1672,1693,1714,1735,1757,1778
};
void inverter_spwm(void)
{
static u16 spwm_count=0;
set_pwm(TIM1,1,(u16)((sinData[spwm_count%length]-1800)*duty/1000+1800),3500);
spwm_count++;
if(spwm_count>=400)spwm_count=0;
}
如上图所示,想要实现SPWM波的效果我们就得让PWM波模拟出SPWM波的效果,由于我们单片机不能产生负压信号,所以我们在此处假定PWM波输出占空比为50%的时候,等同于输出电压0V。原理也在于,如果占空比为50%时,那么正压和负压加在负载上的功率一致,相互抵消最终宏观上显现的就是0V的电压。占空比大于50%时,相当于输出正压,小于50%时相当于输出负压。因此只需让PWM波以50%占空比为原点,让其按照正弦规律变化即刻,比如从50%一直升到90%,然后再从90%缓慢降到10%,再升到50%由此就实现了一个正弦规律的变化,在此处还设置了调制系数,通过控制调制系数的大小,可以改变超出50%和低于50%占空比的占空比大小。比如若之前设定为最高75%占空比输出,最低25%输出,改变调制系数的大小,使其最高输出90%占空比,最低10%占空比,这样输出的交流电压幅值就会高。
而改变调制系数也不能直接乘以我们数组里面的占空比,由于我们设置的重装载值是3600,对应的最大占空就为100%,因此以1800为中心点进行正弦规律变化。想要改变上下幅值大小,首先将数组里面执行的当前值减去1800,然后再乘以调制系数,最终再加上一个1800就能得到相对于50%占空比的幅值倍增而不是整体倍增。大家画画图就可以理解了。
四、实物调试图片
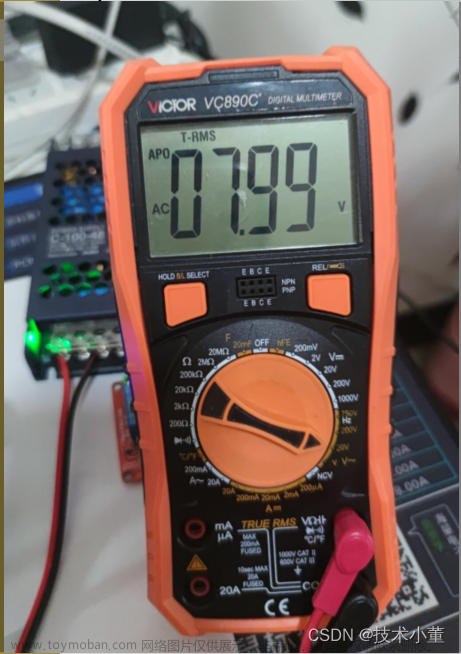
1、额定电压输出24V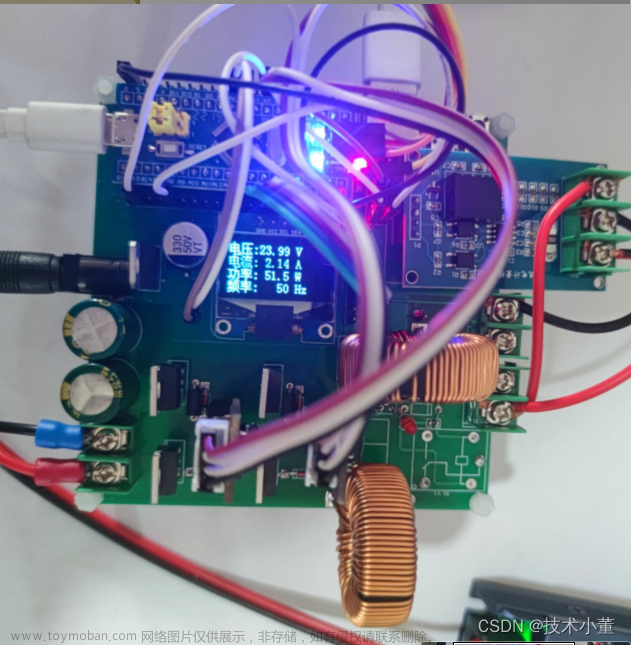

2、额定电压输出16V


3、额定电压输出8V
 文章来源:https://www.toymoban.com/news/detail-400608.html
文章来源:https://www.toymoban.com/news/detail-400608.html
总结
这就是单相逆变电路的设计,有不懂的朋友可以评论下方留言,我看到了就会回复文章来源地址https://www.toymoban.com/news/detail-400608.html
到了这里,关于单相逆变电路实战!(基于STM32F103C8T6的单相逆变电路,PID控制输出额定电压)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!