平台2HDL语言与验证实验报告
一、自定FSM说明
1、状态描述
S0:sleep,S1:起床,S2:早餐,S3:运动,S4:上课,S5:中餐,S6:开摆,S7:午休,S8:锻炼,S9:自习,S10:洗澡,S11:吃夜宵
2、设计代码说明
首先是对我们定义的状态进行编码,编码如下:
state0=4'b0000,
state1=4'b0001,
state2=4'b0010,
state3=4'b0011,
state4=4'b0100,
state5=4'b0101,
state6=4'b0110,
state7=4'b0111,
state8=4'b1000,
state9=4'b1001,
state10=4'b1010,
state11=4'b1111;接下来,是对每个状态之间的跳转的代码:
always@(*)
case(state)
state0:if(start)next_st=state1;
else next_st=state0;
state1:next_st=state2;
state2:if(skip1)next_st=state3;
else next_st=state4;
state3:next_st=state5;
state4:next_st=state5;
state5:if(play)next_st=state6;
else next_st=state7;
state6:next_st=state7;
state7:if(read)next_st=state9;
else next_st=state8;
state8:next_st=state10;
state9:if(wash)next_st=state10;
else next_st=state11;
state10:if(eat)next_st=state11;
else next_st=state0;
state11:next_st=state0;
default:next_st=state0;
endcase这里,代码的实现是非常简单的,就是当一个状态一个条件的时候,就会跳转到另一个条件,这里由于我画的图太丑了,就不展示在这了。
3、仿真波形说明(截图+文字标注)
仿真之前,我们需要写一个测试的文件,也就是具体控制波形输出的一个文件:
initial begin
start=0; skip1=0; play=0; read=0; wash=0;
#1;
#200 start = 1;
#200 start = 0;skip1 = 1;
#200 skip1 = 0;play = 1;
#200 read = $random;wash = 1;
#200 eat=1;
wait(zot ==4'b1010)
repeat(1024)@(posedge clk);
$stop;
end这里,我们定义的是每隔200ns设置一个信号量,根据代码我们可以推断出在1ns处,reset信号为1,让所有的信号初始化为0。
保持200ns之后,start信号变为1(也就是闹钟响了,要起床了),这里我们推测状态变为S1(也就是4'h1),同时由于S1和S2之间没有条件判断跳转,所以这一段时间中最后会变成S2状态(也就是无论如何你都会去吃早饭)。
上述情况保持200ns之后,start信号被设置为0,skip1信号被设置为1,也就是S2状态会变成S3状态(也就是吃完早饭之后出门散散步),S3和S5之间同样没有条件判断是否跳转,这里就是你吃完早饭散会步,散饿了自然会去吃午饭了。
再隔200ns之后,skip信号被设置为0,play信号被设置为1了。这里就会从S5状态跳转到S6状态(也就是吃完饭了,自然需要玩会游戏了)。同样不可能一直玩游戏的,一段时间之后会自动跳转到S7状态,这里也就是摆一会之后,自然就需要进行午休了。
又隔了200ns,read信号被设置为了随机值(也就是午休之后,可能去自习,也可能不去),同时wash信号被设置为了1,也就是不论是自习还是不去自习,若read信号为1的话,会在自习之后去洗一个澡,若read信号为0的话,就不会去上自习了,而是去锻炼,锻炼之后再去洗澡。
最后200ns之后,eat信号被设置为1,也就是洗完澡之后,我们就要去吃夜宵了也就是S11状态,最后的最后我们就要sleep了,这一天就结束了。

通过波形,验证出我们的分析是正确的。以上分析就是对仿真波形的分析。
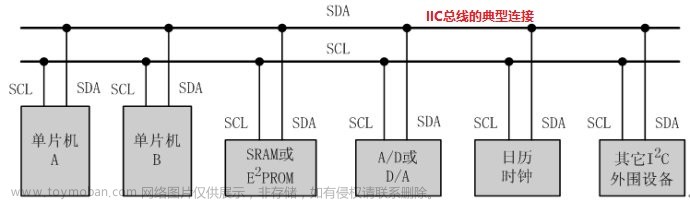
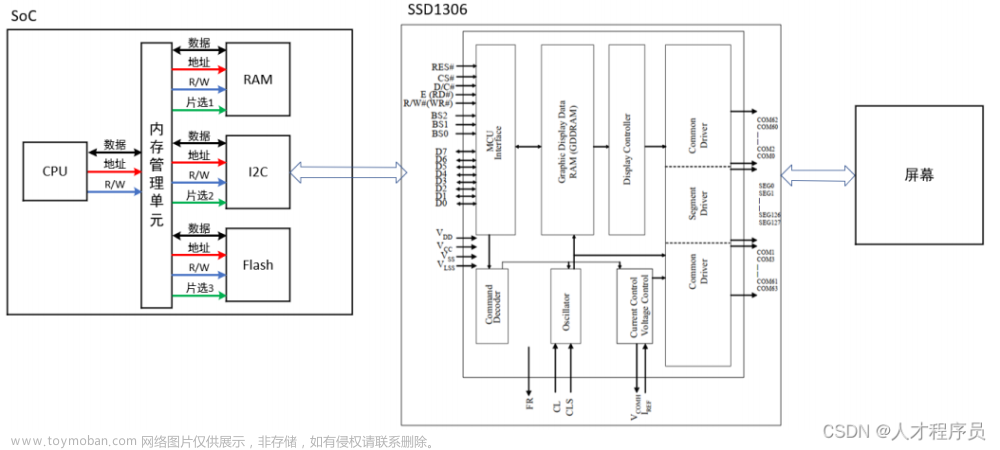
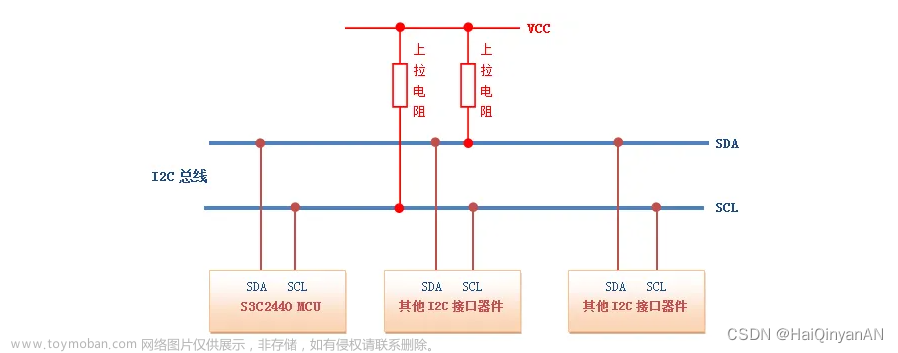
二、EEPROM读写代码设计及仿真
1、代码说明
端口
`timescale 1ns / 1ps //时间单位1ns,精度1ps
module i2c(
input clk, //时钟
input rstn, //复位
input write_op, //写操作
input [7:0]write_data, //需要写入的数据
input read_op, //读操作
output reg [7:0]read_data, //读出的数据
input [7:0]addr, //数据地址
output op_done, //操作结束
output reg scl, //scl
inout sda //sda
);状态
Byte Write : START + DEVICE +ACK + ADDR + ACK + DATA + ACK + STOP
Random Read : START + DEVICE + ACK +ADDR + ACK+START + DEVICE + DATA + NO ACK + STOP
每个状态用8位16进制数表示,对照上面图中SDA上数据传输情况,每一位数据传输都有一个对应的状态,多出了一些等待状态。
parameter IDLE =8'h00,
WAIT_WTICK0=8'h01,
WAIT_WTICK1=8'h02,
W_START=8'h03,
W_DEVICE7=8'h04,
W_DEVICE6=8'h05,
W_DEVICE5=8'h06,
W_DEVICE4=8'h07,
W_DEVICE3=8'h08,
W_DEVICE2=8'h09,
W_DEVICE1=8'h0a,
W_DEVICE0=8'h0b,
W_DEVACK=8'h0c,
W_ADDRES7=8'h0d,
W_ADDRES6=8'h0e,
W_ADDRES5=8'h0f,
W_ADDRES4=8'h10,
W_ADDRES3=8'h11,
W_ADDRES2=8'h12,
W_ADDRES1=8'h13,
W_ADDRES0=8'h14,
W_AACK=8'h15,
W_DATA7=8'h16,
W_DATA6=8'h17,
W_DATA5=8'h18,
W_DATA4=8'h19,
W_DATA3=8'h1a,
W_DATA2=8'h1b,
W_DATA1=8'h1c,
W_DATA0=8'h1d,
W_DACK=8'h1e,
WAIT_WTICK3=8'h1f,
R_START=8'h20,
R_DEVICE7=8'h21,
R_DEVICE6=8'h22,
R_DEVICE5=8'h23,
R_DEVICE4=8'h24,
R_DEVICE3=8'h25,
R_DEVICE2=8'h26,
R_DEVICE1=8'h27,
R_DEVICE0=8'h28,
R_DACK=8'h29,
R_DATA7=8'h2a,
R_DATA6=8'h2b,
R_DATA5=8'h2c,
R_DATA4=8'h2d,
R_DATA3=8'h2e,
R_DATA2=8'h2f,
R_DATA1=8'h30,
R_DATA0=8'h31,
R_NOACK=8'h32,
S_STOP=8'h33,
S_STOP0=8'h34,
S_STOP1=8'h35,
W_OPOVER=8'h36;
reg [7:0]i2c,next_i; //当前状态,下一状态SCL同步
时钟的频率很高,读写数据不能以时钟周期为周期进行,设备进行响应和读写需要的时间远大于时钟周期,因此使用SCL同步方式来同 步时序。SCL周期是通过时钟周期实现的。
一个scl周期是30个时钟周期。使用div_cnt来记录时钟周期数,30个一次循环。以下只是时间单位 声明,SCL的具体实现在下方↓。
SCL周期:
|——————————
| ———————— |
clk0 clk7 clk15 clk22 clk29
scl_ls scl_lc scl_hs scl_hc scl_tick
reg [7:0]div_cnt; //时钟计数器
wire scl_tick;
//计数,一个时钟周期div_cnt+1
always @(posedge clk or negedge rstn)
if(!rstn) div_cnt <=8'd0;
else if((i2c==IDLE)|scl_tick) div_cnt <=8'd0;
else div_cnt<=div_cnt+1'b1;
//scl时间
wire scl_ls =(div_cnt==8'd0); //scl low
wire scl_lc = (div_cnt==8'd7); //scl low center
wire scl_hs =(div_cnt==8'd15); //scl high
wire scl_hc = (div_cnt==8'd22); //scl high center
assign scl_tick = (div_cnt==8'd29); //一个周期结束
状态更新
//状态
always @(posedge clk or negedge rstn)
if(!rstn) i2c <=0;
else i2c <= next_i;读写命令的判断
读写命令是通过端口输入write_op和read_op确定的,这两个信号是低电平有效,用了wr_op和rd_op两个寄存器把输入的write_op和 read_op取反,这样如果有读或写命令,wr_op或rd_op为1,复位和操作结束(wr_opover)时都要清零,接下来就用wr_op和rd_op判断是否读 写了,这里仅仅是把原来低电平有效的信号替换为两个高电平有效信号。
reg wr_op,rd_op; //读写操作
always @ (posedge clk or negedge rstn)
if(!rstn) wr_op <= 0;
else if (i2c==IDLE) wr_op <= ~write_op;
else if(i2c==W_OPOVER) wr_op <=1'b0;
always @(posedge clk or negedge rstn)
if(!rstn) rd_op <= 0;
else if (i2c==IDLE) rd_op <= ~read_op;
else if(i2c==W_OPOVER) rd_op <=1'b0;
wire d5ms_over; //等待
下一状态的判断
Byte Write : START + DEVICE +ACK + ADDR + ACK + DATA + ACK + STOP
Random Read : START + DEVICE + ACK +ADDR + ACK+START + DEVICE + DATA + NO ACK + STOP
下一状态的更新是在scl_tick(每30个clk),上面下划线划出的部分是相同的,无论读写,一开始的状态更新都是按照上面下划线的顺 序依次更新状态,这时候的器件地址都是10100000(write),到了ADDR的ACK,即W_AACK时会根据wr_op和rd_op决定接下来进入怎样的 状态,wr_op会开始到状态W_DATA读数据;rd_op会到WAIT_WTICK3,然后继续START。操作结束后需要等待一个信号d5ms_over才能回到 空闲,控制器件工作的频率不要太高。
always@(*)
case (i2c)
IDLE: begin next_i = IDLE;if(wr_op|rd_op) next_i = WAIT_WTICK0;end //有读写操作跳出空闲状态
//wait tick
WAIT_WTICK0:begin next_i = WAIT_WTICK0;if(scl_tick) next_i=WAIT_WTICK1;end
WAIT_WTICK1:begin next_i = WAIT_WTICK1;if(scl_tick) next_i = W_START;end
//START:SCL=1,SDA=1->0(scl_lc)
W_START:begin next_i=W_START;if(scl_tick) next_i=W_DEVICE7;end
//DEVICE ADDRESS(1010_000_0(WRITE))
W_DEVICE7:begin next_i = W_DEVICE7;if(scl_tick) next_i=W_DEVICE6;end
W_DEVICE6:begin next_i = W_DEVICE6;if(scl_tick) next_i=W_DEVICE5;end
W_DEVICE5:begin next_i = W_DEVICE5;if(scl_tick) next_i=W_DEVICE4;end
W_DEVICE4:begin next_i = W_DEVICE4;if(scl_tick) next_i=W_DEVICE3;end
W_DEVICE3:begin next_i = W_DEVICE3;if(scl_tick) next_i=W_DEVICE2;end
W_DEVICE2:begin next_i = W_DEVICE2;if(scl_tick) next_i=W_DEVICE1;end
W_DEVICE1:begin next_i = W_DEVICE1;if(scl_tick) next_i=W_DEVICE0;end
W_DEVICE0:begin next_i = W_DEVICE0;if(scl_tick) next_i=W_DEVACK;end
//ACK
W_DEVACK:begin next_i=W_DEVACK;if(scl_tick) next_i=W_ADDRES7;end
//WORD ADDRESS
W_ADDRES7 :begin next_i = W_ADDRES7;if(scl_tick) next_i=W_ADDRES6;end
W_ADDRES6 :begin next_i = W_ADDRES6;if(scl_tick) next_i=W_ADDRES5;end
W_ADDRES5 :begin next_i = W_ADDRES5;if(scl_tick) next_i=W_ADDRES4;end
W_ADDRES4 :begin next_i = W_ADDRES4;if(scl_tick) next_i=W_ADDRES3;end
W_ADDRES3 :begin next_i = W_ADDRES3;if(scl_tick) next_i=W_ADDRES2;end
W_ADDRES2 :begin next_i = W_ADDRES2;if(scl_tick) next_i=W_ADDRES1;end
W_ADDRES1 :begin next_i = W_ADDRES1;if(scl_tick) next_i=W_ADDRES0;end
W_ADDRES0 :begin next_i = W_ADDRES0;if(scl_tick) next_i=W_AACK;end
//ACK
W_AACK:begin next_i = W_AACK;
if(scl_tick&wr_op) next_i=W_DATA7; //wr_op即写命令,开始写数据
else if(scl_tick&rd_op) next_i=WAIT_WTICK3; //rd_op读命令,则下一状态为WAIT_WTICK3
end
//WRITE DATA[7:0]
W_DATA7:begin next_i=W_DATA7;if(scl_tick)next_i=W_DATA6;end
W_DATA6:begin next_i=W_DATA6;if(scl_tick)next_i=W_DATA5;end
W_DATA5:begin next_i=W_DATA5;if(scl_tick)next_i=W_DATA4;end
W_DATA4:begin next_i=W_DATA4;if(scl_tick)next_i=W_DATA3;end
W_DATA3:begin next_i=W_DATA3;if(scl_tick)next_i=W_DATA2;end
W_DATA2:begin next_i=W_DATA2;if(scl_tick)next_i=W_DATA1;end
W_DATA1:begin next_i=W_DATA1;if(scl_tick)next_i=W_DATA0;end
W_DATA0:begin next_i=W_DATA0;if(scl_tick)next_i=W_DACK;end
//ACK
W_DACK:begin next_i=W_DACK; if(scl_tick) next_i=S_STOP;end
//Current Address Read
//START: SCL=1,SDA=1->0(scl_lc)
WAIT_WTICK3:begin next_i=WAIT_WTICK3; if(scl_tick) next_i=R_START;end
R_START:begin next_i=R_START; if(scl_tick)next_i=R_DEVICE7;end
//DEVICE ADDRESS(1010_000_1(READ))
R_DEVICE7:begin next_i=R_DEVICE7; if(scl_tick) next_i=R_DEVICE6;end
R_DEVICE6:begin next_i=R_DEVICE6; if(scl_tick) next_i=R_DEVICE5;end
R_DEVICE5:begin next_i=R_DEVICE5; if(scl_tick) next_i=R_DEVICE4;end
R_DEVICE4:begin next_i=R_DEVICE4; if(scl_tick) next_i=R_DEVICE3;end
R_DEVICE3:begin next_i=R_DEVICE3; if(scl_tick) next_i=R_DEVICE2;end
R_DEVICE2:begin next_i=R_DEVICE2; if(scl_tick) next_i=R_DEVICE1;end
R_DEVICE1:begin next_i=R_DEVICE1; if(scl_tick) next_i=R_DEVICE0;end
R_DEVICE0:begin next_i=R_DEVICE0; if(scl_tick) next_i=R_DACK;end
//ACK
R_DACK:begin next_i=R_DACK;if(scl_tick) next_i=R_DATA7;end
//READ DATA[7:0], SDA:input
R_DATA7:begin next_i=R_DATA7;if(scl_tick) next_i=R_DATA6;end
R_DATA6:begin next_i=R_DATA6;if(scl_tick) next_i=R_DATA5;end
R_DATA5:begin next_i=R_DATA5;if(scl_tick) next_i=R_DATA4;end
R_DATA4:begin next_i=R_DATA4;if(scl_tick) next_i=R_DATA3;end
R_DATA3:begin next_i=R_DATA3;if(scl_tick) next_i=R_DATA2;end
R_DATA2:begin next_i=R_DATA2;if(scl_tick) next_i=R_DATA1;end
R_DATA1:begin next_i=R_DATA1;if(scl_tick) next_i=R_DATA0;end
R_DATA0:begin next_i=R_DATA0;if(scl_tick) next_i=R_NOACK;end
//NO ACK
R_NOACK:begin next_i=R_NOACK;if(scl_tick) next_i=S_STOP;end
//STOP
S_STOP:begin next_i=S_STOP;if(scl_tick) next_i=S_STOP0;end
S_STOP0:begin next_i=S_STOP0;if(scl_tick) next_i=S_STOP1;end
S_STOP1:begin next_i=S_STOP1;if(scl_tick) next_i=W_OPOVER;end
//WAIT write_op=0,read_op=0;
W_OPOVER:begin next_i = W_OPOVER;if(d5ms_over)next_i=IDLE;end //操作结束回到空闲状态
default:begin next_i= IDLE;end
endcaseSCL同步实现
空闲,等待,操作结束,start开始等状态下SCL都是高电平,因此不需要clr_scl对SCL清零。另外clr_scl只在scl_ls(scl的低电平开始)处 才置1,把scl清0,在15个clk周期的scl_hs处,再把scl拉高,就实现了SCL周期。
//SCL
assign clr_scl=scl_ls&(i2c!=IDLE)&(i2c!=WAIT_WTICK0)& //clr_scl,scl置0信号
(i2c != WAIT_WTICK1)&(i2c!=W_START)&(i2c!=R_START)
&(i2c!=S_STOP0)&(i2c!=S_STOP1)&(i2c!=W_OPOVER);
always @(posedge clk or negedge rstn)
if(!rstn) scl <= 1'b1; //复位,scl为高电平
else if(clr_scl) scl <= 1'b0; //scl 1->0
else if(scl_hs) scl <=1'b1; //scl 0->1,high start,clk15SDA实现
代码后半都是SDA实现的部分,因为太长所以一段一段分析。
下面的一段是实现SDA的控制信号声明,这些信号在对应的状态且scl在低电平的中心时置1,告诉SDA该怎么做,i2c_reg用来暂存scl上 的数据,i2c_rlf是在读写数据时用的,使用的部分在下一段代码。
//SDA
reg [7:0]i2c_reg;
assign start_clr = scl_lc &((i2c==W_START)|(i2c==R_START)); //在scl low center开始读写操作
assign ld_wdevice = scl_lc&(i2c==W_DEVICE7); //加载器件地址
assign ld_waddres = scl_lc&(i2c==W_ADDRES7); //加载数据地址
assign ld_wdata= scl_lc&(i2c==W_DATA7); //加载数据
assign ld_rdevice = scl_lc&(i2c==R_DEVICE7); //读操作的器件地址
assign noack_set = scl_lc&(i2c==R_NOACK) ; //读操作完毕,主机发响应
assign stop_clr = scl_lc&(i2c==S_STOP);
assign stop_set = scl_lc&((i2c==S_STOP0)|(i2c==WAIT_WTICK3));
assign i2c_rlf =scl_lc&( //有读写则i2c_rlf
(i2c == W_DEVICE6)|
(i2c == W_DEVICE5)|
(i2c == W_DEVICE4)|
(i2c == W_DEVICE3)|
(i2c == W_DEVICE2)|
(i2c == W_DEVICE1)|
(i2c == W_DEVICE0)|
(i2c == W_ADDRES6)|
(i2c == W_ADDRES5)|
(i2c == W_ADDRES4)|
(i2c == W_ADDRES3)|
(i2c == W_ADDRES2)|
(i2c == W_ADDRES1)|
(i2c == W_ADDRES0)|
(i2c == W_DATA6)|
(i2c == W_DATA5)|
(i2c == W_DATA4)|
(i2c == W_DATA3)|
(i2c == W_DATA2)|
(i2c == W_DATA1)|
(i2c == W_DATA0)|
(i2c == R_DEVICE6)|
(i2c == R_DEVICE5)|
(i2c == R_DEVICE4)|
(i2c == R_DEVICE3)|
(i2c == R_DEVICE2)|
(i2c == R_DEVICE1)|
(i2c == R_DEVICE0));
接下来就是根据控制信号进行操作,把对应操作的数据放到i2c_reg里,准备向SDA线上传输,i2c_rlf为1时i2creg会左移一位,因为sda 是单位宽的,每次把i2creg的最高位送到sda上,因此左移就是一位一位把数据送到sda上。
always@(posedge clk or negedge rstn)
if(!rstn) i2c_reg <= 8'hff; //复位,高电平
else if(start_clr) i2c_reg <= 8'h00; //开始读写,sda输出
else if(ld_wdevice) i2c_reg <= {4'b1010,3'b000,1'b0}; //10100000 写
else if(ld_waddres) i2c_reg <= addr; //加载数据地址
else if(ld_wdata) i2c_reg <= write_data; //加载写入的数据
else if(ld_rdevice) i2c_reg <= {4'b1010,3'b000,1'b1}; //10100001 读
else if(noack_set) i2c_reg <= 8'hff; //NOACK
else if(stop_clr) i2c_reg <= 8'h00;
else if(stop_set) i2c_reg <= 8'hff;
else if(i2c_rlf) i2c_reg <= {i2c_reg[6:0],1'b0}; //左移接下来是sda输出的控制,sda使能在主机写数据地址,数据时都是1,使能为1时器件靠sda输出i2creg的最高位。NOACK以外的其他 响应信号,以及读的数据,都是从机发到sda线上的,这时主机的sda使能为0,不可以发出数据。2、TestBench代码说明
assign sda_o = i2c_reg[7]; //sda
assign clr_sdaen = (i2c==IDLE)| //sda使能置0信号
(scl_lc&(
(i2c==W_DEVACK)|
(i2c==W_AACK)|
(i2c==W_DACK)|
(i2c==R_DACK)|
(i2c==R_DATA7)));
assign set_sdaen = scl_lc&( //sda使能置1信号
(i2c==WAIT_WTICK0)|
(i2c==W_ADDRES7)|
(i2c==W_DATA7)|
(i2c==WAIT_WTICK3)|
(i2c==S_STOP)|
(i2c==R_NOACK));
reg sda_en;
always @(posedge clk or negedge rstn)
if(!rstn) sda_en <= 0;
else if (clr_sdaen) sda_en <=0;
else if(set_sdaen) sda_en <= 1'b1;
assign sda= sda_en?sda_o: 1'bz; //sda使能为1时sda可工作
以下是读数据的操作,用sda_wr控制,在scl高电平的中心(数据稳定时)往read_data里读数据,左移补sda,就一位一位的用sda发的 数据更新了read_data,这时sda是从机在发数据。
assign sda_wr = scl_hc &( //读数据
(i2c==R_DATA7)|
(i2c==R_DATA6)|
(i2c==R_DATA5)|
(i2c==R_DATA4)|
(i2c==R_DATA3)|
(i2c==R_DATA2)|
(i2c==R_DATA1)|
(i2c==R_DATA0));
always@(posedge clk or negedge rstn)
if(!rstn) read_data <= 0;
else if(sda_wr) read_data <= {read_data[6:0],sda}; //左移读入数据
操作结束,等待
最后就是操作结束后的等待时间,d5ms_cnt用来记时钟周期,记满了就会把d5ms_over置1,在上面状态转换的部分,最后进入STOP状 态等待的就是这个信号,等到了这个信号,I2C就回到空闲状态了。
//op_done
assign op_done = (i2c == W_OPOVER); //操作结束
//Write Cycle(5ms)
//6MHZ = 166ns,5ms/166ns = 31
reg [12:0] d5ms_cnt;
always @(posedge clk or negedge rstn)
if(!rstn) d5ms_cnt <= 8'd0;
else if(i2c==IDLE) d5ms_cnt <= 8'd0;
else if(i2c==W_OPOVER) d5ms_cnt <= d5ms_cnt + 1'b1;
assign d5ms_over = (d5ms_cnt==13'h1FFF);最后,这个模块里没有ACK处理的部分,只是在应该收到ACK的时候从sda读信号出来,没有进行判断,或许是交给主机来做的。
2、TestBench代码说明
TestBench主要代码如下:
initial
begin
clk = 0;
rstn = 0;
write_op=1'b1;
write_data=8'h00;
read_op=1'b1;
addr=0;
repeat(5) @(posedge clk);
rstn = 1'b1;
end
initial
begin
wait(rstn);
repeat(10) @(posedge clk);
write_op=1'b0;
addr = 8'h55;
write_data= 8'haa;
wait(op_done);
write_op=1'b1;
$display ($stime/1,"ns","Write:Addr(%h)=(%h)\n",addr,write_data);
repeat(100)@(posedge clk);
read_op=1'b0;
addr = 8'h55;
wait(op_done);
read_op=1'b1;
$display ($stime/1,"ns","Write:Addr(%h)=(%h)\n",addr,read_data);
repeat(1000) @(posedge clk);
$stop;
end根据上面的代码发现,我们可以知道读写命令是通过端口输入write_op和read_op确定的。所以该程序先写再读,波形应该也是这样。
3、仿真波形说明(截图+文字标注)

SCL为高时,SDA为下降沿的时候,设备开始工作。先由主机写入器件地址,然后写入数据地址,每次写入后从机都会回复一个ACK信号表示收到。其中器件地址是从机EEPROM的地址1010000X,X为0表示写,1表示读,一开始写入器件地址时,X都是0。进行写操作,接下来只需要由主机发出数据就可以了,从机发出ACK响应回复收到。

进行读操作,重新写一遍器件地址,这次X就是1了,表示接下来要读数据了,从机读出数据,主机收到数据以后回复NOACK给从机表示收到数据。
三、实验总结
通过本次实验我学会了以下几个知识点:
- 掌握状态机描述方法;
- 能编写TestBench;
- 能用ModelSim进行仿真;
- 掌握I2C接口协议;
- 能较好的理解参考设计文件和测试文件;
- 能用ModelSim进行仿真,合理解释各个信号的作用;
- 使用Quartus建立“EEPROM读写代码”工程;
-
下载验证"EEPROM读写代码"功能;文章来源:https://www.toymoban.com/news/detail-401966.html
经过几次的实验,不仅磨练了我的意志,坚定了我的信念,相信在未来的实验中同样可以获得很多的收获。文章来源地址https://www.toymoban.com/news/detail-401966.html
到了这里,关于FSM和i2c实验报告的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!