超声波传感器避障机器人
1、应用介绍
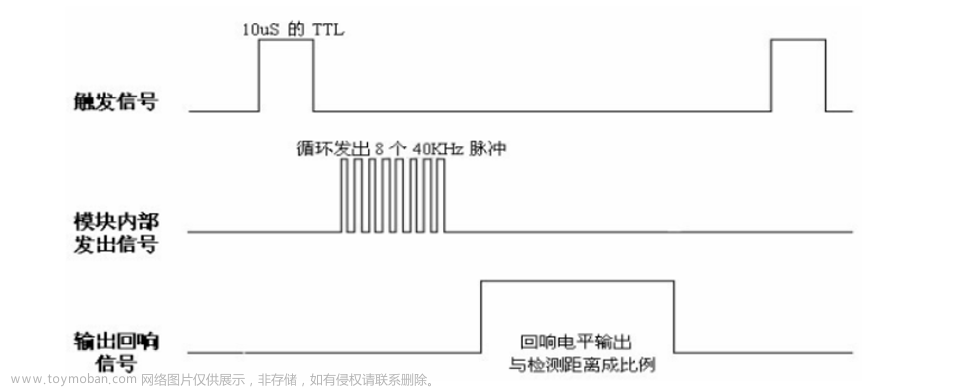
在本应用中,我们将使用一个超声波传感器与两个直流电机和一个伺服电机相结合,Arduino作为主控板创建一个简单的避障机器人。 超声波传感器发送和接收信号以确定物体的距离。 如果距离小于 15 厘米有物体,机器人将停止。 然后它环顾四周,转向一个它什么都感觉不到的方向,然后朝那个方向移动。 超声波传感器安装在伺服电机上,以便机器人可以移动并寻找畅通的路径。
关于超声波传感的驱动,在前面的文章中做了详细的介绍,请参考:文章来源:https://www.toymoban.com/news/detail-403077.html
- Ardunio开发实例-超声波传感器SR04测量距离
- Arduino与Proteus仿真实例-HC-SRF04超声波测距仿真
- 8051单片机Proteus仿真与开发实例-超声测距HC-SR04仿真
- ESP8266-Arduino编程实例-HC-SR04超声波传感器驱动
- STM32F1与STM32CubeIDE编程实例-超声波测距传感器驱动
关于直流电机驱动,在前面的文章中做了详文章来源地址https://www.toymoban.com/news/detail-403077.html
到了这里,关于Arduino开发实例-DIY超声波传感器避障机器人的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!