前言
在通信方面。UART由于全双工通信,可以同时接受数据和发送数据而被广泛使用。
而接受数据则又有很多种方法
比如:
<1>根据结束符判断,数据是字符串形式,所以一般串口接受的接受符就是"\r\n" 换成16进制ascil码显示就是 0X0D 0X0A (对应\r\n)
<2>定时器中断,设计"喂狗信号量"也就是串口空闲的时间,在串口接受后的定时器里不断递减,减到零则判断接受完毕,接受数据则喂狗刷新递减时间。(这也是单片机常见的串口接受思路)
参考我51的工程:
单片机串口中断以及消息收发处理——对接受信息进行判断实现控制_昊月光华的博客-CSDN博客_单片机串口中断怎么触发
<3>STM32有很多种方式,前两种在某些情况都很可以用。
但是第一种只适用于判断结束符。在我最近做射频模块(RF)串口发送的数据(一种16进制的格式,没有\r\n的结束符)就受限了,另外第二种需要搭配定时器。而本次写作介绍的串口接受中断和空闲中断则让我感到满意 YYDS!!!
理解
串口接受中断 :
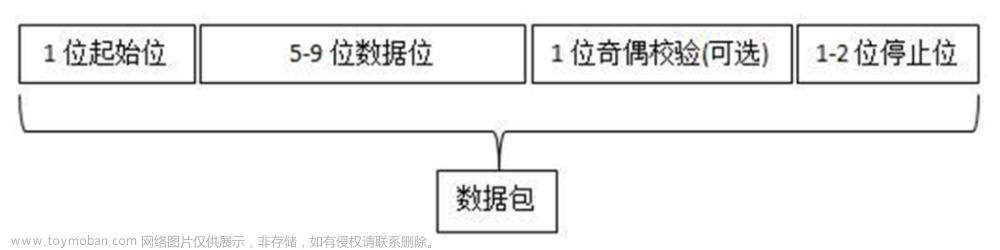
使能串口接受中断RXEN后,串口接受一个数据包 ,一帧 (通常 8位数据位,一位结束位)则进入中断。
以定时器2为例
使能
__HAL_UART_ENABLE_IT(&huart2,UART_IT_RXNE);实际处理函数
USART2_IRQHandler(void)在HAL库里这个函数是不能被重定义,在stm32f1xx_it.c里 加__weak 表示弱定义可被重写
__weak void USART2_IRQHandler(void)串口空闲中断:
在使能IDLE ,在串口接受完一帧数据后,在一个字节的时间内串口保持空闲则触发串口空闲中断
再次进入 USART2_IRQHandler(void)
使能
__HAL_UART_ENABLE_IT(&huart2,UART_IT_IDLE);和串口接受数据的中断处理函数一样。 像是上面第二种方法的改进,因为第二种方法不知道定时多长时间,因为数据发送间隔大小不知道,只能估摸着一个值来通过衰减的“喂狗信号量”来判断。同样,如果数据太大且不停的发送则也不会空闲。
值得注意的是,串口接受完后空闲必须清除空闲标志位。通过读串口DR寄存器里的值来清除IDLE标志位,否则程序一直触发空闲中断。
比如串口中断处理代码(以串口三为例) 注意(用__weak修饰hal库stm32f1x_it.c里的以此重写)
void USART3_IRQHandler(void){
uint8_t temp;
if(huart3.Instance->SR & UART_FLAG_RXNE){
Rx_uart3_signal=2;
temp=huart3.Instance->DR;
Rx_uart3_buf[Rx_uart3_cnt++]=temp;
}
else if(huart3.Instance->SR & UART_FLAG_IDLE){
temp=huart3.Instance->DR;
Rx_uart3_signal=0;
}
}通过Rx_uart3_signal=0判断一次接受完毕,在while中打印数据。给我的效果个感觉都非常不错,是第二种方法以硬件的方式(stm32自带的空闲中断)而不是定时器实现了数据包的接受。文章来源:https://www.toymoban.com/news/detail-403165.html
参考
STM32串口之空闲中断_csdn_dx的博客-CSDN博客_串口空闲中断文章来源地址https://www.toymoban.com/news/detail-403165.html
到了这里,关于STM32基于HAL库的串口接受中断和空闲中断的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!