前言:
舵机控制的另一个专业名字叫伺服控制。
经过百度,伺服”—词源于希腊语“奴隶”的意思。人们想把“伺服机构”当个得心应手的驯服工具,服从控制信号的要求而动作。在讯号来到之前,转子静止不动;讯号来到之后,转子立即转动;当讯号消失,转子能即时自行停转。由于它的“伺服”性能,因此而得名——伺服系统。
我们这次就是要控制舵机转动任意角度。
舵机
一、外观

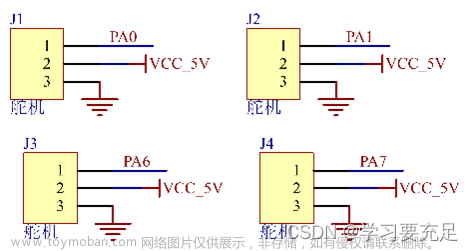
接线方法:
红-------------------------VCC
棕色----------------------GND
橙色----------------------信号线
二、相关参数

三、工作原理
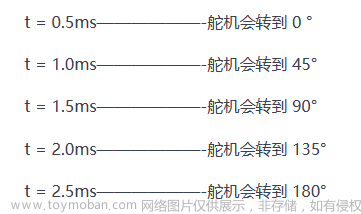
舵机的控制信号为周期是20ms 的脉宽调制(PWM)信号,其中脉冲宽度从0.5ms-2.5ms,相对应舵盘的位置为0—180度,呈线性变化。也就是说,给它提供一定的脉宽,它的输出轴就会保持在一个相对应的角度上,无论外界转矩怎样改变,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应的位置上。舵机内部有一个基准电路,产生周期20ms,宽度1.5ms的基准信号,有一个比较器,将外加信号与基准信号相比较,判断出方向和大小,从而产生电机的转动信号。
控制电路板接受来自信号线相应的PWM控制信号,进而控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止。
舵机的控制需要MCU产生一个周期为20ms的脉冲信号,以0.5ms到2.5ms的高电平来控制舵机转动的角度。
四、舵机购买注意事项
1、在购买时,需要分清楚你的舵机可以转180度,还是360度。相关区别购买时可以了解。

2、舵机又分为数字舵机和模拟舵机。
模拟舵机:需要不断的发送相应角度的PWM信号,才能旋转到指定位置。例如:我现在让它旋转90度,我就需要在一个时间内不断的发送90度的PWM信号,舵机转动到指定位置就会停止。
数字舵机:只需给一个目的地PWM信号,即可旋转到指定位置。例如:我现在让它旋转90度,我只需要发送一次90度的PWM信号,它就可以旋转到90度。
SG90舵机 是模拟舵机,SG90S舵机 我记得好像是数字舵机,总之数字舵机比模拟舵机好些,无论实在程序控制方面还是在运行情况方面都要好些
五、代码编写
舵机要用PWM来控制,PWM的产生可以用软件延时和定时器的方法。这里为了体现精确性,采用定时器的方式。
首先还是看下这张图片,这个是PWM控制SG90舵机的关键。我们只有按照给舵机输入正确的PWM波形,舵机才会转动到指定的角度。
上代码:
1、PWM波形的周期我们用定时器产生,所以先对定时器做初始化:
void Timer_Init()
{
TMOD=0X01; //T0定时方式1
TH0=0Xfe;
TL0=0X33; //计数初值设置为0.5ms
ET0=1; //打开定时器0的中断
TR0=1; //打开定时器0
EA=1; //开总中断
}
2、然后就是编写定时器中断函数,和输出对应的PWM波形了:
PWM波形这里是在定时器里产生的。
sbit PWM=P2^3; //对应舵机的PWM引脚
int count=0; //全局变量count用于定时器计数
int c=0; //这个值为高低电平的临界值,可以改变,
//这里初始化为0表示开始让舵机复位到0度位置(输出0.5ms的高电平)
void Timer() interrupt 1
{
TH0=0Xfe;
TL0=0X33; //重新赋计数初值为0.5ms
if(count<=c) //进入定时器的时间和高低电平临界值比较
{
PWM=1; //输出PWM波形中的高电平
}
else
{
PWM=0;
}
count++;
if(count>=40) //计数40次,每次0.5ms,总共达到20ms周期后清零,为下一周期开始计数做准备
{
count=0;
}
}
3、主函数代码的书写:
void main()
{
Timer_Init();
while(1);
}
嗯嗯,上面就是代码全部了,没有给出整体代码,防止只复制粘贴,不动脑瓜子的童鞋
1、那。。。,博主博主,我把上面的代码组装到工程里去了,烧写到单片机中去,开机舵机没反应呀?
答:看看舵机原本是不是在0度的位置,如果是,请手动把他转到其它角度,在上电,看舵机转到0度了没有。
2、那。。。,博主博主,我想让舵机上电就复位到90度的位置,咋办?
答:认真看下代码里语句的注释,我们将程序中的高低电平临界值变量c,赋值为2,即c=2;上电后,舵机如果不在90度的位置,就会复位到90度了。
3、那。。。,博主博主,我想定义两个按键,按下一个按键舵机转到0度位置,按下另一个按键,舵机转到180位置,咋办?
答:先用sbit定义两个按键引脚,然后在主函数中的while循环里,判断哪个按键按下,然后改变临界值C就行。如下
while(1)
{
if(key1==0)
{
delay_ms(5);
if(key1==0)
{
c=0; //对应高电平输出0.5ms,转到0度
while(!key1);
}
}
else if(key2==0)
{
delay_ms(5);
if(key2==0)
{
c=4; //对应高电平输出2.5ms,转到180度
while(!key2);
}
}
}
六、优化后的代码
嗯。。。,咋子优化哦,上面不就可以让舵机抓到指定位置了吗?
SG90是模拟舵机,需要在一个时间内不断的输出一定的PWM波形给舵机,它才会转到到指定位置,上面的代码中我是让定时器不断的工作,不断的输出PWM波形。
其实对于模拟舵机,不需要一直让定时器工作输出PWM波形,只用在一段时间内输出一定的PWM波形就可以。那为什么这样考虑呢?因为给一段时间的PWM波形后,舵机就可以转动到位了,后面再给PWM波形就没有意义了,舵机转动到位后,就可以关闭定时器了(除非你的其它功能要用到定时器,就可以不用关),这样可以避免后面不断的触发定时中断,影响主函数while里其它功能的执行效率,毕竟进入定时中断函数里时,主函数时不得执行的。
上面讲到的那个时间,可以通过实际调试多次测出来,博主这里测出来了。文章来源:https://www.toymoban.com/news/detail-404651.html
**完整并优化的项目代码放到最后:
【51单片机控制SG90舵机】
**文章来源地址https://www.toymoban.com/news/detail-404651.html
到了这里,关于单片机——SG90舵机工作原理的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!