记录一下自己遇到的问题及解决方法,希望能帮助到一些人。
第一步,读取芯片的原始数据。需要注意两点:1、对HAL库提供的IIC读取写入函数进行再包装。(千万不要觉的这步多此一举,后面移植DMP时用得到)
/**
* @brief 写寄存器,这是提供给上层的接口
* @param slave_addr: 从机地址
* @param reg_addr: 寄存器地址
* @param len:写入的长度
* @param data_ptr: 指向要写入的数据
* @retval 正常为 0,不正常为非 0
*/
int Sensors_I2C_WriteRegister(unsigned char slave_addr,
unsigned char reg_addr,
unsigned short len,
unsigned char *data_ptr){
HAL_StatusTypeDef status = HAL_OK;
status = HAL_I2C_Mem_Write(&I2C_Handle,slave_addr,reg_addr,
I2C_MEMADD_SIZE_8BIT,data_ptr,len,I2Cx_FLAG_TIMEOUT);
if(status != HAL_OK){
}
while (HAL_I2C_GetState(&I2C_Handle) != HAL_I2C_STATE_READY) {
}
/* 检查 SENSOR 是否就绪进行下一次读写操作 */
while (HAL_I2C_IsDeviceReady(&I2C_Handle, slave_addr,
I2Cx_FLAG_TIMEOUT, I2Cx_FLAG_TIMEOUT) == HAL_TIMEOUT);
/* 等待传输结束 */
while (HAL_I2C_GetState(&I2C_Handle) != HAL_I2C_STATE_READY) {
}
return status;
}
/**
* @brief 读寄存器,这是提供给上层的接口
* @param slave_addr: 从机地址
* @param reg_addr: 寄存器地址
* @param len:要读取的长度
* @param data_ptr: 指向要存储数据的指针
* @retval 正常为 0,不正常为非 0
*/
int Sensors_I2C_ReadRegister(unsigned char slave_addr,
unsigned char reg_addr,
unsigned short len,
unsigned char *data_ptr){
HAL_StatusTypeDef status = HAL_OK;
status =HAL_I2C_Mem_Read(&I2C_Handle,slave_addr
,reg_addr,I2C_MEMADD_SIZE_8BIT,data_ptr,len,I2Cx_FLAG_TIMEOUT);
if (status != HAL_OK) {/* 检查通讯状态 */
}
while (HAL_I2C_GetState(&I2C_Handle) != HAL_I2C_STATE_READY) {
}
/* 检查 SENSOR 是否就绪进行下一次读写操作 */
while (HAL_I2C_IsDeviceReady(&I2C_Handle, slave_addr,
I2Cx_FLAG_TIMEOUT, I2Cx_FLAG_TIMEOUT) == HAL_TIMEOUT);
/* 等待传输结束 */
while (HAL_I2C_GetState(&I2C_Handle) != HAL_I2C_STATE_READY) {
}
return status;
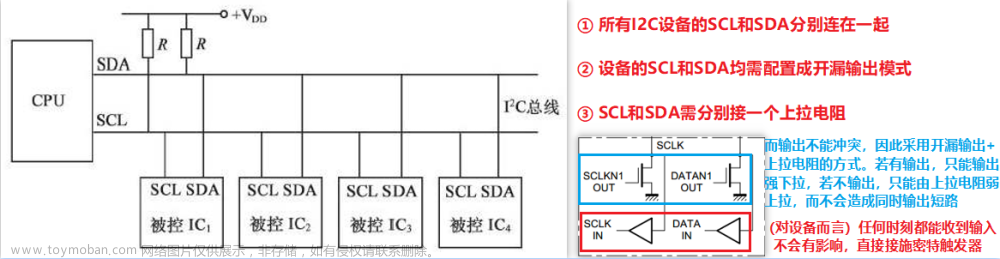
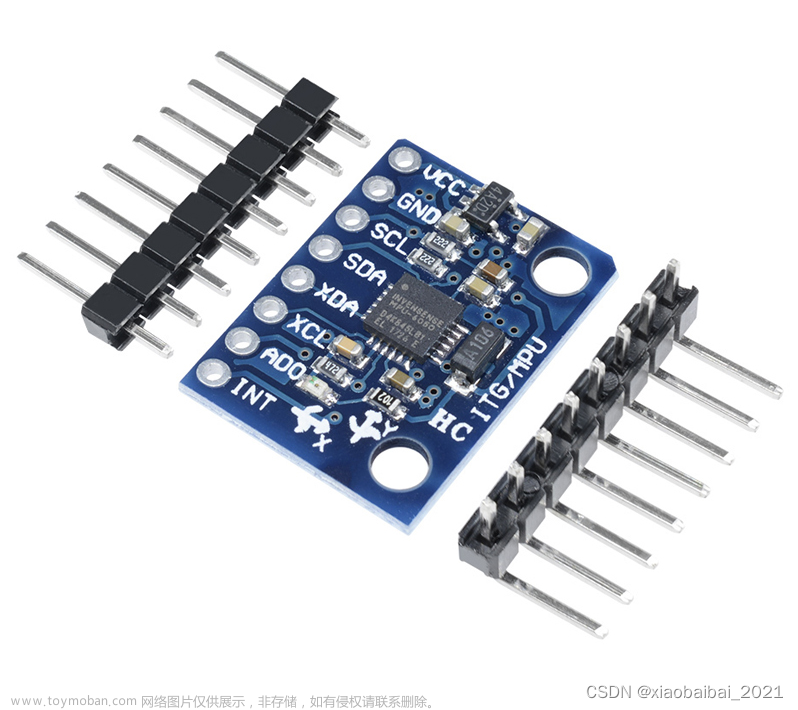
}2、芯片的地址(这里面有俩坑)第一就是,芯片的 I2C 设备地址可通过 AD0 引脚的电平控制,当 AD0 接地时,设 备地址为 0x68(七位地址),当 AD0 接电源时,设备地址为 0x69(七位地址)。第二就是,用HAL库需要将地址向左移一位,也就是0x68<<1,0x69<<1。
// MPU6050, Standard address 0x68
#define MPU6050_ADDRESS 0x68<<1然后就没啥问题了,下面是我的代码
初始化MPU6050芯片
/**
* @brief 写数据到 MPU6050 寄存器
* @param reg_add: 寄存器地址
* @param reg_data: 要写入的数据
* @retval
*/
void MPU6050_WriteReg(uint8_t reg_add,uint8_t reg_dat){
Sensors_I2C_WriteRegister(MPU6050_ADDRESS,reg_add,1,®_dat);
}
/**
* @brief 从 MPU6050 寄存器读取数据
* @param reg_add: 寄存器地址
* @param Read:存储数据的缓冲区
* @param num:要读取的数据量
* @retval
*/
void MPU6050_ReadData(uint8_t reg_add,unsigned char* Read,uint8_t num){
Sensors_I2C_ReadRegister(MPU6050_ADDRESS,reg_add,num,Read);
}
/**
* @brief 初始化 MPU6050 芯片
* @param
* @retval
*/
void MPU6050_Init(void){
//在初始化之前要延时一段时间,若没有延时,则断电后再上电数据可能会出错
HAL_Delay(100);
//解除休眠状态
MPU6050_WriteReg(MPU6050_RA_PWR_MGMT_1, 0x00);
//陀螺仪采样率
MPU6050_WriteReg(MPU6050_RA_SMPLRT_DIV , 0x07);
MPU6050_WriteReg(MPU6050_RA_CONFIG , 0x06);
//配置加速度传感器工作在 16G 模式
MPU6050_WriteReg(MPU6050_RA_ACCEL_CONFIG , 0x01);
//陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s)
MPU6050_WriteReg(MPU6050_RA_GYRO_CONFIG, 0x18);
HAL_Delay(200);
}
/**
* @brief 读取 MPU6050 的 ID
* @param
* @retval 正常返回 1,异常返回 0
*/
uint8_t MPU6050ReadID(void){
unsigned char Re = 0;
MPU6050_ReadData(MPU6050_RA_WHO_AM_I,&Re,1); //读器件地址
if (Re != 0x68) {
printf("检测不到 MPU6050 模块,请检查模块与开发板的接线,------%d\r\n",Re);
return 0;
} else {
printf("MPU6050 ID = %d\r\n",Re);
return 1;
}
}读取加速度、角加速度、温度的原始数据,并转化为摄氏度
/**
* @brief 读取 MPU6050 的加速度数据
* @param
* @retval
*/
void MPU6050ReadAcc(short *accData){
uint8_t buf[6];
MPU6050_ReadData(MPU6050_ACC_OUT, buf, 6);
accData[0] = (buf[0] << 8) | buf[1];
accData[1] = (buf[2] << 8) | buf[3];
accData[2] = (buf[4] << 8) | buf[5];
}
/**
* @brief 读取 MPU6050 的角加速度数据
* @param
* @retval
*/
void MPU6050ReadGyro(short *gyroData){
uint8_t buf[6];
MPU6050_ReadData(MPU6050_GYRO_OUT,buf,6);
gyroData[0] = (buf[0] << 8) | buf[1];
gyroData[1] = (buf[2] << 8) | buf[3];
gyroData[2] = (buf[4] << 8) | buf[5];
}
/**
* @brief 读取 MPU6050 的原始温度数据
* @param
* @retval
*/
void MPU6050ReadTemp(short *tempData){
uint8_t buf[2];
MPU6050_ReadData(MPU6050_RA_TEMP_OUT_H,buf,2); //读取温度值
*tempData = (buf[0] << 8) | buf[1];
}
/**
* @brief 读取 MPU6050 的温度数据,转化成摄氏度
* @param
* @retval
*/
void MPU6050_ReturnTemp(float*Temperature){
short temp3;
uint8_t buf[2];
MPU6050_ReadData(MPU6050_RA_TEMP_OUT_H,buf,2); //读取温度值
temp3= (buf[0] << 8) | buf[1];
*Temperature=((double) (temp3 /340.0))+36.53;
}********然后就是重头戏了——DMP的移植!!!(真是恶心坏我了)
第一步,把官方文档中motion_driver_6.12\arm\STM32F4_MD6\Projects\eMD6\core的四个文件夹全复制过来,一个也不能少。
然后再去官方文档motion_driver_6.12\mpl libraries\arm\Keil,解压你需要的静态库,我选的是第四个。(第四个和第五个有区别,具体问百度吧,我忘了)
然后把解压好的静态库libmpllib.lib复制到刚才那四个文件夹中的mpl文件夹中,再把这个文件夹里面的libmpllib.a给删了。
然后打开Keil5,把刚才复制的.c文件全部加进来,包括静态库。不用分,直接搞一个group就行。
接着把下面这三个宏定义加进去,并添加头文件路径。
MPL_LOG_NDEBUG=1
EMPL,MPU6050
EMPL_TARGET_STM32F4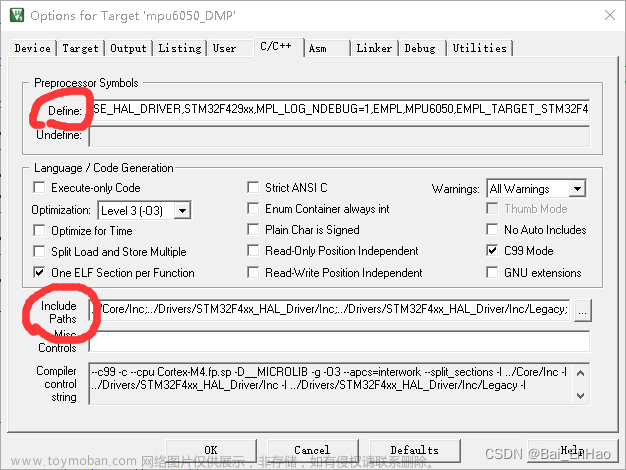
接下来就是最恶心的——修改程序
inv_mpu.c
#include "i2c.h"
#include "main.h"
#include "log.h"
//#include "board-st_discovery.h"//*****************
//这两个文件是我创建的
#include "bsp_i2c.h"//这个里面是讲HAL库中的IIC写入读取封装成Sensors_I2C_WriteRegister、Sensors_I2C_ReadRegister
#include "bsp_mpu6050_dmp.h"//这里面有get_tick_count函数,还有MPU6050带DMP的初始化,以及四元数的读取函数
#define i2c_write Sensors_I2C_WriteRegister
#define i2c_read Sensors_I2C_ReadRegister
#define delay_ms HAL_Delay//***************
#define get_ms get_tick_count
#define log_i printf//***************
#define log_e printf//***************
#define min(a,b) ((a<b)?a:b)inv_mpu_dmp_motion_driver.c
#include "i2c.h"
#include "main.h"
//#include "board-st_discovery.h"//******************
#include "bsp_i2c.h"
#include "bsp_mpu6050_dmp.h"
#define i2c_write Sensors_I2C_WriteRegister
#define i2c_read Sensors_I2C_ReadRegister
#define get_ms get_tick_count创建bsp_mpu6050_dmp.h和bsp_mpu6050_dmp.c
#ifndef __BSP_MPU6050_DMP_H__
#define __BSP_MPU6050_DMP_H__
#include "stm32f4xx.h"
#include <stdio.h>
#include <i2c.h>
void gyro_data_ready_cb(void);
int get_tick_count(unsigned long *count);
uint8_t mpu_dmp_init(void);
uint8_t mpu_dmp_get_data(float *pitch,float *roll,float *yaw);
int fputcc(int ch);
#endif
#include "bsp_mpu6050_dmp.h"
#include "usart.h"
#include "i2c.h"
#include "gpio.h"
#include "main.h"
#include "inv_mpu.h"
#include "inv_mpu_dmp_motion_driver.h"
#include "invensense.h"
#include "invensense_adv.h"
#include "eMPL_outputs.h"
#include "mltypes.h"
#include "mpu.h"
#include "log.h"
#include "packet.h"
/* Private typedef -----------------------------------------------------------*/
/* Data read from MPL. */
#define PRINT_ACCEL (0x01)
#define PRINT_GYRO (0x02)
#define PRINT_QUAT (0x04)
#define PRINT_COMPASS (0x08)
#define PRINT_EULER (0x10)
#define PRINT_ROT_MAT (0x20)
#define PRINT_HEADING (0x40)
#define PRINT_PEDO (0x80)
#define PRINT_LINEAR_ACCEL (0x100)
#define PRINT_GRAVITY_VECTOR (0x200)
volatile uint32_t hal_timestamp = 0;
#define ACCEL_ON (0x01)
#define GYRO_ON (0x02)
#define COMPASS_ON (0x04)
#define MOTION (0)
#define NO_MOTION (1)
/* Starting sampling rate. */
#define DEFAULT_MPU_HZ (100)
#define FLASH_SIZE (512)
#define FLASH_MEM_START ((void*)0x1800)
#define PEDO_READ_MS (1000)
#define TEMP_READ_MS (500)
#define COMPASS_READ_MS (100)
#define q30 1073741824.0f
static signed char gyro_orientation[9] = { 1, 0, 0,
0, 1, 0,
0, 0, 1};
int get_tick_count(unsigned long *count)
{
*count = HAL_GetTick();
return 0;
}
int fputcc(int ch)
{
printf("%c",ch);
// HAL_UART_Transmit(&huart1, (uint8_t*)&ch, 1, 0xFF);
return 0;
}
uint8_t run_self_test(void)
{
int result;
long gyro[3], accel[3];
result = mpu_run_self_test(gyro, accel);
if (result == 0x07) { //返回0x03为MPU6050六轴,只要通过该if语句,就可以实现零偏自动校准
/* Test passed. We can trust the gyro data here, so let's push it down
* to the DMP.
*/
float sens;
unsigned short accel_sens;
mpu_get_gyro_sens(&sens); //读取当前陀螺仪的状态
gyro[0] = (long)(gyro[0] * sens);
gyro[1] = (long)(gyro[1] * sens);
gyro[2] = (long)(gyro[2] * sens);
dmp_set_gyro_bias(gyro); //根据读取的状态进行校准
mpu_get_accel_sens(&accel_sens); //读取当前加速度计的状态
accel[0] *= accel_sens;
accel[1] *= accel_sens;
accel[2] *= accel_sens;
dmp_set_accel_bias(accel); //根据读取的状态进行校准
printf("setting bias succesfully ......\r\n");
return 0;
}
else
return 1;
}
//mpu6050,dmp初始化
//返回值:0,正常
// 其他,失败
uint8_t mpu_dmp_init(void)
{
uint8_t res=0;
struct int_param_s int_param;//这个没什么用,就是为了能给他实参调用起来
if(mpu_init(&int_param)==0) //初始化MPU6050
{
res=mpu_set_sensors(INV_XYZ_GYRO|INV_XYZ_ACCEL);//设置所需要的传感器
if(res)return 1;
res=mpu_configure_fifo(INV_XYZ_GYRO | INV_XYZ_ACCEL);//设置FIFO
if(res)return 2;
res=mpu_set_sample_rate(DEFAULT_MPU_HZ); //设置采样率
if(res)return 3;
res=dmp_load_motion_driver_firmware(); //加载dmp固件
if(res)return 4;
res=dmp_set_orientation(inv_orientation_matrix_to_scalar(gyro_orientation));//设置陀螺仪方向
if(res)return 5;
res=dmp_enable_feature(DMP_FEATURE_6X_LP_QUAT|DMP_FEATURE_TAP| //设置dmp功能
DMP_FEATURE_ANDROID_ORIENT|DMP_FEATURE_SEND_RAW_ACCEL|DMP_FEATURE_SEND_CAL_GYRO|
DMP_FEATURE_GYRO_CAL);
if(res)return 6;
res=dmp_set_fifo_rate(DEFAULT_MPU_HZ); //设置DMP输出速率(最大不超过200Hz)
if(res)return 7;
res = run_self_test(); //自检
if(res)return 8;
res=mpu_set_dmp_state(1); //使能DMP
if(res)return 9;
}
return 0;
}
//得到dmp处理后的数据(注意,本函数需要比较多堆栈,局部变量有点多)
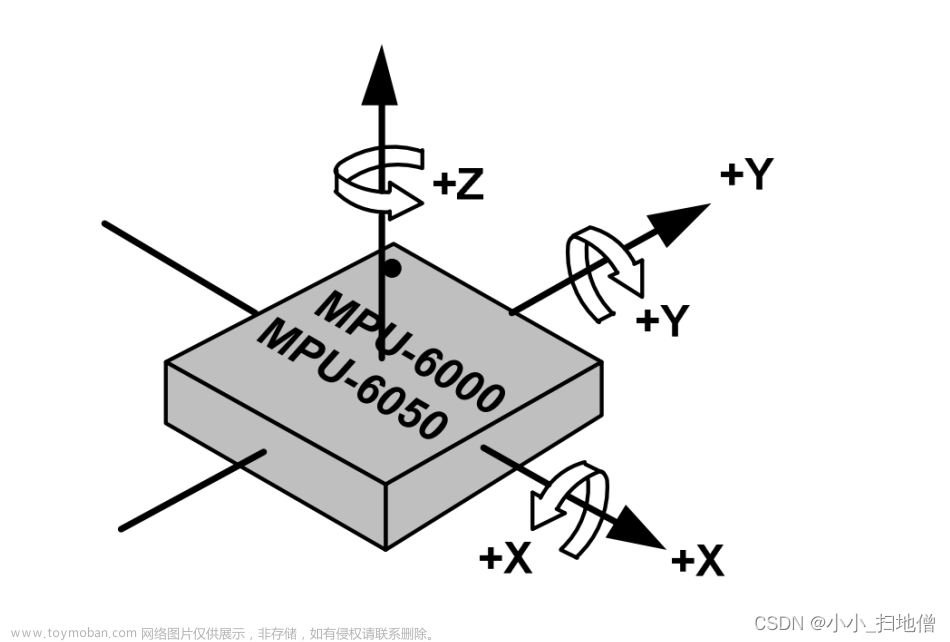
//pitch:俯仰角 精度:0.1° 范围:-90.0° <---> +90.0°
//roll:横滚角 精度:0.1° 范围:-180.0°<---> +180.0°
//yaw:航向角 精度:0.1° 范围:-180.0°<---> +180.0°
//返回值:0,正常
// 其他,失败
uint8_t mpu_dmp_get_data(float *pitch,float *roll,float *yaw)
{
float q0=1.0f,q1=0.0f,q2=0.0f,q3=0.0f;
unsigned long sensor_timestamp;
short gyro[3], accel[3], sensors;
unsigned char more;
long quat[4];
if(dmp_read_fifo(gyro, accel, quat, &sensor_timestamp, &sensors,&more))return 1;
/* Gyro and accel data are written to the FIFO by the DMP in chip frame and hardware units.
* This behavior is convenient because it keeps the gyro and accel outputs of dmp_read_fifo and mpu_read_fifo consistent.
**/
/*if (sensors & INV_XYZ_GYRO )
send_packet(PACKET_TYPE_GYRO, gyro);
if (sensors & INV_XYZ_ACCEL)
send_packet(PACKET_TYPE_ACCEL, accel); */
/* Unlike gyro and accel, quaternions are written to the FIFO in the body frame, q30.
* The orientation is set by the scalar passed to dmp_set_orientation during initialization.
**/
if(sensors&INV_WXYZ_QUAT)
{
q0 = quat[0] / q30; //q30格式转换为浮点数
q1 = quat[1] / q30;
q2 = quat[2] / q30;
q3 = quat[3] / q30;
//计算得到俯仰角/横滚角/航向角
*pitch = asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3; // pitch
*roll = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3; // roll
*yaw = atan2(2*(q1*q2 + q0*q3),q0*q0+q1*q1-q2*q2-q3*q3) * 57.3; //yaw
}else return 2;
return 0;
}
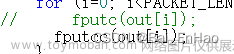
然后就是把log_stm32.c中的所有fputc(...)替换成fputcc(...)。
然后就是,inv_mpu_dmp_motion_driver.c中,有一个__no_operation(); 直接注释掉(我也不知道这个是干啥的)

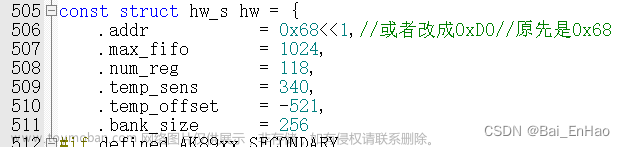
然后是修改MPU6050 的地址, 去inv_mpu.c中,直接搜“hw_s hw”就能找到
接下来就是修改main函数,调用mpu_dmp_get_data,编译运行了
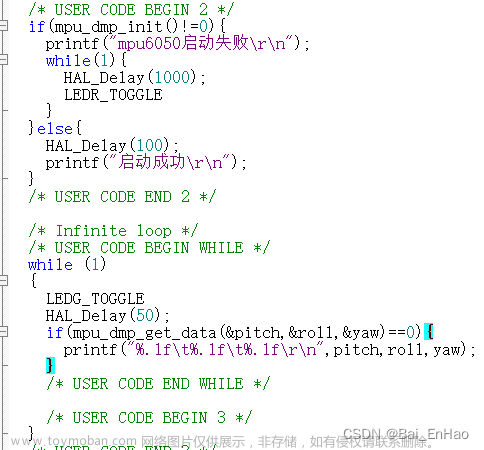
注意还需要定义float pitch;float roll;float yaw;这仨变量。
最后,可能会出现mpu_dmp_init没问题,但mpu_dmp_get_data函数里的dmp_read_fifo函数出现了问题,解决方法见https://blog.csdn.net/liusenyon/article/details/119333722https://blog.csdn.net/liusenyon/article/details/119333722文章来源:https://www.toymoban.com/news/detail-404721.html
stm32f4 移植 mpu6050 md6.12步骤_Scarlett29的博客-CSDN博客_emd 6.12z我是按照这篇文章移植的。在此特别感谢两位作者。文章来源地址https://www.toymoban.com/news/detail-404721.html
到了这里,关于MPU6050(读取原数据、移植DMP、stm32f4、HAL库、KEIL5)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
![[GD32F4]基于GD32固件库移植cherryusb[STM32F4]](https://imgs.yssmx.com/Uploads/2024/02/736610-1.png)
![[Arduino ESP32] mpu6050使用笔记(含dmp)](https://imgs.yssmx.com/Uploads/2024/02/675539-1.png)