1.所用的资源
1.两个Zigbee透传模块
2.两块32板(我手上的是VET6和RCT6的两块板子),其它的板子也可以,不过注意一下启动文件对应
3.颗粒物传感器
2.Zigbee模块简介
DL-22无线串口模块
1.工作模式分为点对点和广播模式
点对点模式,要设置一个发送端,一个接收端,根据它说明书进行设置就好,还需要设置相同的信道,信道就是与传输数据的通道,不同的信道不会相互干扰
2.广播模式,所有的Zigbee模块都在同一个信道,任何一个模块发出的数据都可以被其它模块接收
我这里采用的是点对点模式,根据说明书已设置好发送与接收
3. STM32板上用到的资源
1.发送端32板:用到三个USART串口,串口1用于检验单独节点传感器数据是否采集成功,与串口助手通信,在确保传感器数据采集ok的情况下也可以不用,串口2用于与采集传感器数据,串口3用来连接Zigbee模块。
2.接收端32板:用到两个USART串口,串口1用于与串口助手通信,串口2用于连接Zigbee模块。
3.我这里串口对应的板子引脚
串口1:PA9 PA10
串口2: PA2 PA3
串口3: PB10 PB11
4.代码部分
1.在之前记录的串口通信博客的基础上。
2.Zigbee模块其实就是透传作用,发送端通过串口2采集颗粒物传感器数据到单片机内,通过串口3传给Zigbee模块,两个Zigebee模块通信,接收端Zigbee模块通过串口2将接收的数据传到板内,再通过串口1与串口助手进行通信。所以关键的地方就在发送端的串口2接收传感器数据完成后,把数据通过串口3发送到Zigbee模块,所以需要在串口二的中断函数里面加入串口3发送数据的命令。
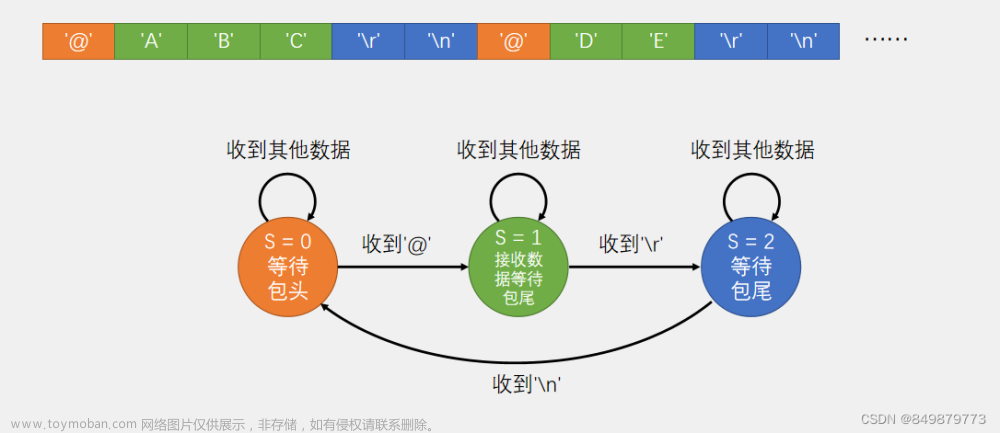
3.发送端串口2中断文章来源:https://www.toymoban.com/news/detail-404860.html
//功能:串口2中断服务程序,接收到数据会进入这个函数
//参数:无
//返回:无
u8 USART_RX_BUF[10];//定义接收数组,看传感器返回的有多少字节数据
u8 USART_RX_STA=0;//数组标志位,如第0位、第一位
static char start=0; //开始接收数据标志位
void USART2_IRQHandler(void)
{
u8 Res=0;//定义一个数来接收每次读取的数据
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) //接收中断,每一个字节都会中断一次
{
Res =USART_ReceiveData(USART2); //读取接收到的字节数据
//接收数据时不要随便加入占用时间的命令,如串口打印,会影响下面数据字节的接收
if(Res == 0xFF) //如果接收的第一位数据是0XFF(这个是查看传感器的手册得知的,这里相当于进行校验)
{
start=1; //开始接收数据标志位,一旦第一个接收正确,就就继续向下接收
}
if(start== 1)
{
USART_RX_BUF[USART_RX_STA] = Res ; //把接收到的数据存到数组里面
USART_RX_STA++;//数组标志位加1
if(USART_RX_STA >= 10 && (USART_RX_BUF[1]==0X01))//这里还校验了接收的第二个数据
{
printf("PM2.5:%d\n",USART_RX_BUF[3]);//通过 串口1打印接收数组里的数据
USART_SendData(USART3,USART_RX_BUF[3]); //将数据通过串口3发出 uart3_send_buff(USART_RX_BUF,10);
USART_RX_STA=0;//重新开始接收
USART_RX_BUF[0] = 0;
start=0;
}
}
}
}
4.接收端的代码就和之前串口采集传感器数据主动上传的差不多了,只是把采集传感器的数据换成了采集Zigbee获得的数据。
发送端和接收端的完整代码:放评论区了文章来源地址https://www.toymoban.com/news/detail-404860.html
到了这里,关于STM32+Zigbee模块实现串口通信获取传感器数据的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!