项目简介
目的: 实现昆虫的图像分类,同时该模型也可以用于其他图像的分类识别,只需传入相应的训练集进行训练,保存为另一个模型即可,进行调用使用。
配置环境: pycharm(python3.7),导入pytotch库
知识预备: 需要了解卷积神经网络的基本原理与结构,熟悉pytorch的使用,csdn有很多介绍卷积神经网络的文章,可查阅。
例如:
https://blog.csdn.net/yunpiao123456/article/details/52437794
https://blog.csdn.net/weipf8/article/details/103917202
算法设计思路:
(1) 收集数据集,利用 python 的 requests 库和 bs4 进行网络爬虫,下载数据集
(2) 搭建卷积神经网络
(3)对卷积神经网络进行训练
(4) 改进训练集与测试集,并扩大数据集
(5) 保存模型
(6) 调用模型进行测试
项目效果展示


注,模型我达到的最高正确率在85%,最后稳定在79%,中间出现了过拟合,可减少训练次数进行优化,数据集较少的情况下,建议训练10次就可。
程序运行流程图

代码使用说明
先训练模型,进行模型保存之后可对模型进行调用,不用每使用一次模型就要进行训练。文末有项目的完整代码:修改自己的数据集src位置,一般情况下能正常运行,如果不能,请检查自己的第三方库是否成功安装,以及是否成功导入。若有问题可以私信交流学习。
数据集准备
注:由于爬虫,会有一些干扰数据,所以我这里展示的是进行数据清洗之后的数据。
注:训练集:测试集=7:3(可自己修改)
注:若正确率不理想,可扩大数据集,数据清洗,图片处理等方面进行改进
训练集

部分数据展示

测试集
文件格式与训练集一样。
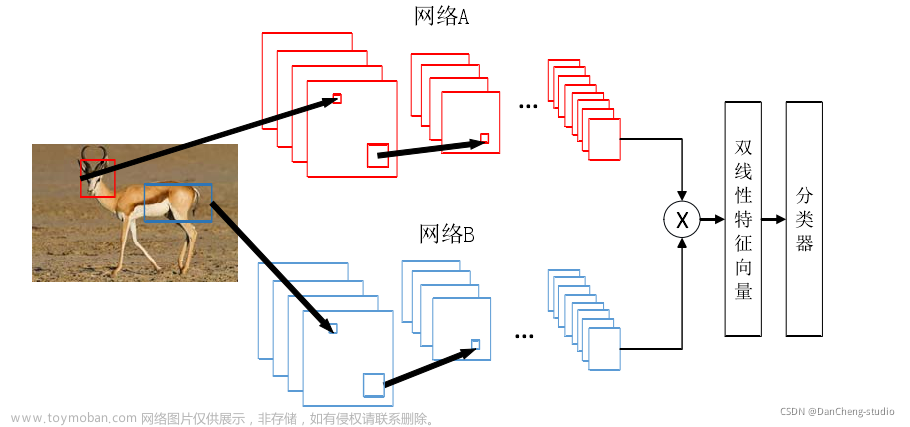
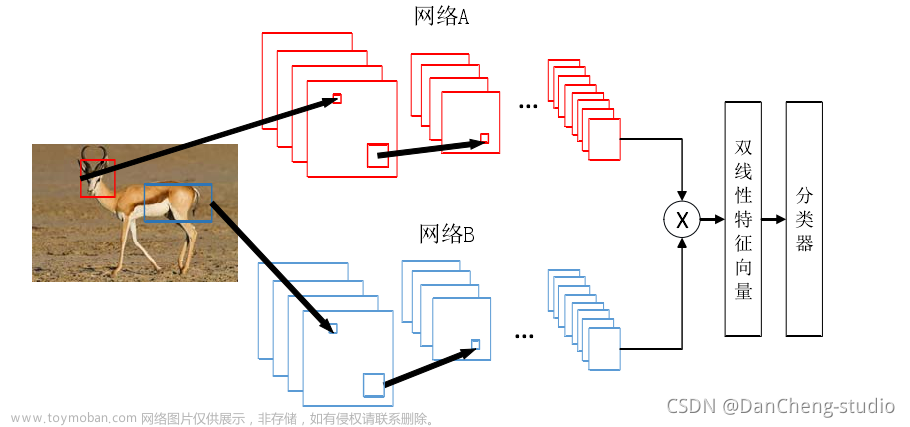
搭建神经网络
框架:
结构:
代码实现:文章来源:https://www.toymoban.com/news/detail-405625.html
# 定义网络
class ConvNet(nn.Module):
def __init__(self):
super(ConvNet, self).__init__()
self.conv1 = nn.Conv2d(3, 32, 3)
self.max_pool1 = nn.MaxPool2d(2)
self.conv2 = nn.Conv2d(32, 64, 3)
self.max_pool2 = nn.MaxPool2d(2)
self.conv3 = nn.Conv2d(64, 64, 3)
self.conv4 = nn.Conv2d(64, 64, 3)
self.max_pool3 = nn.MaxPool2d(2)
self.conv5 = nn.Conv2d(64, 128, 3)
self.conv6 = nn.Conv2d(128, 128, 3)
self.max_pool4 = nn.MaxPool2d(2)
self.fc1 = nn.Linear(4608, 512)
self.fc2 = nn.Linear(512, 1)
def forward(self, x):
in_size = x.size(0)
x = self.conv1(x)
x = F.relu(x)
x = self.max_pool1(x)
x = self.conv2(x)
x = F.relu(x)
x = self.max_pool2(x)
x = self.conv3(x)
x = F.relu(x)
x = self.conv4(x)
x = F.relu(x)
x = self.max_pool3(x)
x = self.conv5(x)
x = F.relu(x)
x = self.conv6(x)
x = F.relu(x)
x = self.max_pool4(x)
# 展开
x = x.view(in_size, -1)
x = self.fc1(x)
x = F.relu(x)
x = self.fc2(x)
x = torch.sigmoid(x)
return x
训练函数
def train(model, device, train_loader, optimizer, epoch):
model.train()
for batch_idx, (data, target) in enumerate(train_loader):
data, target = data.to(device), target.to(device).float().unsqueeze(1)
optimizer.zero_grad()
output = model(data)
# print(output)
loss = F.binary_cross_entropy(output, target)
loss.backward()
optimizer.step()
if (batch_idx + 1) % 1 == 0:
print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
epoch, (batch_idx + 1) * len(data), len(train_loader.dataset),
100. * (batch_idx + 1) / len(train_loader), loss.item()))
测试函数
def test(model, device, test_loader):
model.eval()
test_loss = 0
correct = 0
with torch.no_grad():
for data, target in test_loader:
data, target = data.to(device), target.to(device).float().unsqueeze(1)
# print(target)
output = model(data)
# print(output)
test_loss += F.binary_cross_entropy(output, target, reduction='mean').item()
pred = torch.tensor([[1] if num[0] >= 0.5 else [0] for num in output]).to(device)
correct += pred.eq(target.long()).sum().item()
print('\nTest set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n'.format(
test_loss, correct, len(test_loader.dataset),
100. * correct / len(test_loader.dataset)))
模型-训练过程完整代码
模型保存使用的是torch.save(model,src),model即须保存的模型,src即模型保存的位置,后缀为pth
import torch.nn.functional as F
import torch.optim as optim
import torch
import torch.nn as nn
import torch.nn.parallel
from PIL import Image
import torch.optim
import torch.utils.data
import torch.utils.data.distributed
import torchvision.transforms as transforms
import torchvision.datasets as datasets
# 设置超参数
#每次的个数
BATCH_SIZE = 20
#迭代次数
EPOCHS = 10
#采用cpu还是gpu进行计算
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
# 数据预处理
transform = transforms.Compose([
transforms.Resize(100),
transforms.RandomVerticalFlip(),
transforms.RandomCrop(50),
transforms.RandomResizedCrop(150),
transforms.ColorJitter(brightness=0.5, contrast=0.5, hue=0.5),
transforms.ToTensor(),
transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5])
])
#导入训练数据
dataset_train = datasets.ImageFolder('D:\\cnn_net\\train\\insects', transform)
#导入测试数据
dataset_test = datasets.ImageFolder('D:\\cnn_net\\train\\test', transform)
test_loader = torch.utils.data.DataLoader(dataset_test, batch_size=BATCH_SIZE, shuffle=True)
# print(dataset_train.imgs)
# print(dataset_train[0])
# print(dataset_train.classes)
classess=dataset_train.classes #标签
class_to_idxes=dataset_train.class_to_idx #对应关系
print(class_to_idxes)
# print(dataset_train.class_to_idx)
train_loader = torch.utils.data.DataLoader(dataset_train, batch_size=BATCH_SIZE, shuffle=True)
# for batch_idx, (data, target) in enumerate(train_loader):
# # print(data)
# print(target)
# data, target = data.to(device), target.to(device).float().unsqueeze(1)
# # print(data)
# print(target)
# 定义网络
class ConvNet(nn.Module):
def __init__(self):
super(ConvNet, self).__init__()
self.conv1 = nn.Conv2d(3, 32, 3)
self.max_pool1 = nn.MaxPool2d(2)
self.conv2 = nn.Conv2d(32, 64, 3)
self.max_pool2 = nn.MaxPool2d(2)
self.conv3 = nn.Conv2d(64, 64, 3)
self.conv4 = nn.Conv2d(64, 64, 3)
self.max_pool3 = nn.MaxPool2d(2)
self.conv5 = nn.Conv2d(64, 128, 3)
self.conv6 = nn.Conv2d(128, 128, 3)
self.max_pool4 = nn.MaxPool2d(2)
self.fc1 = nn.Linear(4608, 512)
self.fc2 = nn.Linear(512, 1)
def forward(self, x):
in_size = x.size(0)
x = self.conv1(x)
x = F.relu(x)
x = self.max_pool1(x)
x = self.conv2(x)
x = F.relu(x)
x = self.max_pool2(x)
x = self.conv3(x)
x = F.relu(x)
x = self.conv4(x)
x = F.relu(x)
x = self.max_pool3(x)
x = self.conv5(x)
x = F.relu(x)
x = self.conv6(x)
x = F.relu(x)
x = self.max_pool4(x)
# 展开
x = x.view(in_size, -1)
x = self.fc1(x)
x = F.relu(x)
x = self.fc2(x)
x = torch.sigmoid(x)
return x
modellr = 1e-4
# 实例化模型并且移动到GPU
model = ConvNet().to(device)
print(model)
# 选择简单暴力的Adam优化器,学习率调低
optimizer = optim.Adam(model.parameters(), lr=modellr)
#调整学习率
def adjust_learning_rate(optimizer, epoch):
"""Sets the learning rate to the initial LR decayed by 10 every 30 epochs"""
modellrnew = modellr * (0.1 ** (epoch // 5))
print("lr:", modellrnew)
for param_group in optimizer.param_groups:
param_group['lr'] = modellrnew
# 定义训练过程
def train(model, device, train_loader, optimizer, epoch):
model.train()
for batch_idx, (data, target) in enumerate(train_loader):
data, target = data.to(device), target.to(device).float().unsqueeze(1)
optimizer.zero_grad()
output = model(data)
# print(output)
loss = F.binary_cross_entropy(output, target)
loss.backward()
optimizer.step()
if (batch_idx + 1) % 1 == 0:
print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
epoch, (batch_idx + 1) * len(data), len(train_loader.dataset),
100. * (batch_idx + 1) / len(train_loader), loss.item()))
def test(model, device, test_loader):
model.eval()
test_loss = 0
correct = 0
with torch.no_grad():
for data, target in test_loader:
data, target = data.to(device), target.to(device).float().unsqueeze(1)
# print(target)
output = model(data)
# print(output)
test_loss += F.binary_cross_entropy(output, target, reduction='mean').item()
pred = torch.tensor([[1] if num[0] >= 0.5 else [0] for num in output]).to(device)
correct += pred.eq(target.long()).sum().item()
print('\nTest set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n'.format(
test_loss, correct, len(test_loader.dataset),
100. * correct / len(test_loader.dataset)))
# 训练
for epoch in range(1, EPOCHS + 1):
adjust_learning_rate(optimizer, epoch)
train(model, device, train_loader, optimizer, epoch)
test(model, device, test_loader)
torch.save(model, 'D:\\cnn_net\\datas\\model_insects.pth')
模型-调用完整代码
模型调用使用,torch.load(src)
from PIL import Image
from torchvision import transforms
import torch.nn.functional as F
import torch
import torch.nn as nn
import torch.nn.parallel
# 定义网络
class ConvNet(nn.Module):
def __init__(self):
super(ConvNet, self).__init__()
self.conv1 = nn.Conv2d(3, 32, 3)
self.max_pool1 = nn.MaxPool2d(2)
self.conv2 = nn.Conv2d(32, 64, 3)
self.max_pool2 = nn.MaxPool2d(2)
self.conv3 = nn.Conv2d(64, 64, 3)
self.conv4 = nn.Conv2d(64, 64, 3)
self.max_pool3 = nn.MaxPool2d(2)
self.conv5 = nn.Conv2d(64, 128, 3)
self.conv6 = nn.Conv2d(128, 128, 3)
self.max_pool4 = nn.MaxPool2d(2)
self.fc1 = nn.Linear(4608, 512)
self.fc2 = nn.Linear(512, 1)
def forward(self, x):
in_size = x.size(0)
x = self.conv1(x)
x = F.relu(x)
x = self.max_pool1(x)
x = self.conv2(x)
x = F.relu(x)
x = self.max_pool2(x)
x = self.conv3(x)
x = F.relu(x)
x = self.conv4(x)
x = F.relu(x)
x = self.max_pool3(x)
x = self.conv5(x)
x = F.relu(x)
x = self.conv6(x)
x = F.relu(x)
x = self.max_pool4(x)
# 展开
x = x.view(in_size, -1)
x = self.fc1(x)
x = F.relu(x)
x = self.fc2(x)
x = torch.sigmoid(x)
return x
# 模型存储路径
# model_save_path = 'E:\\Cat_And_Dog\\kaggle\\model_insects.pth'
# ------------------------ 加载数据 --------------------------- #
# Data augmentation and normalization for training
# Just normalization for validation
# 定义预训练变换
# 数据预处理
class_names = ['瓢虫','螳螂',] # 这个顺序很重要,要和训练时候的类名顺序一致
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
# ------------------------ 载入模型并且训练 --------------------------- #
model = torch.load('D:\\cnn_net\\datas\\model_insects.pth')
model.eval()
# print(model)38,49
# image_PIL = Image.open('D:\\cnn_net\\train\\insects\\螳螂\\t28.jpg')
image_PIL = Image.open('D:\\cnn_net\\train\\insects\\瓢虫\\p49.jpg')
# image_PIL = Image.open('D:\\cnn_net\\train\\test\\01.jpg')
transform_test = transforms.Compose([
transforms.Resize(100),
transforms.RandomVerticalFlip(),
transforms.RandomCrop(50),
transforms.RandomResizedCrop(150),
transforms.ColorJitter(brightness=0.5, contrast=0.5, hue=0.5),
transforms.ToTensor(),
transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5])
])
image_tensor = transform_test(image_PIL)
# 以下语句等效于 image_tensor = torch.unsqueeze(image_tensor, 0)
image_tensor.unsqueeze_(0)
# 没有这句话会报错
image_tensor = image_tensor.to(device)
out = model(image_tensor)
# print(out)
pred = torch.tensor([[1] if num[0] >= 0.5 else [0] for num in out]).to(device)
print(class_names[pred])
注
有错误的地方欢迎大家交流学习,进行指正,一起学习进步。文章来源地址https://www.toymoban.com/news/detail-405625.html
到了这里,关于卷积神经网络实现图像识别的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!