前言
相关说明:
开发板:CT117E-M4(STM32G431RBT6)
开发环境: CubeMX+Keil5
涉及题目:第十三届蓝桥杯嵌入式国赛真题
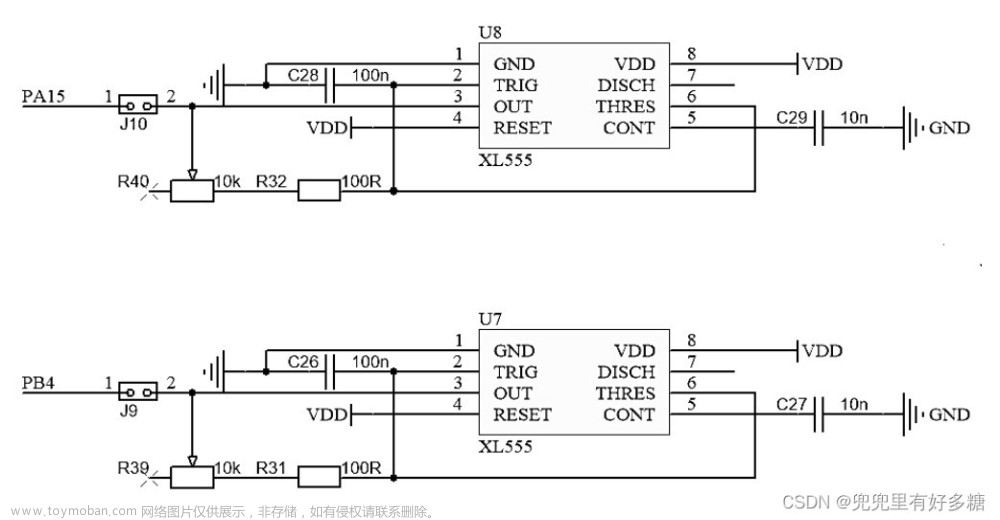
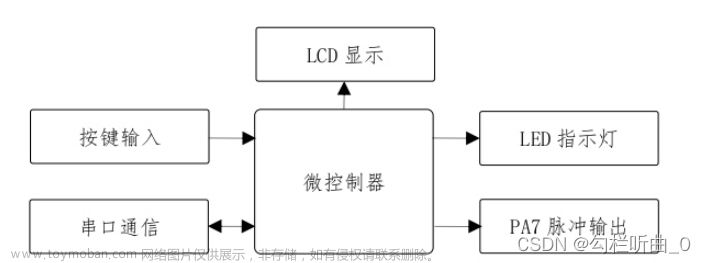
难点:双路AD测量电压、输入捕获测频率、LCD屏幕翻转、冒泡法、初始上电判断、按键长短按
CubeMX配置、主要函数代码及说明:文章来源:https://www.toymoban.com/news/detail-405883.html
一、CubeMX配置(第十三届国赛真题)
1.使能外部高速时钟:
2.配置时钟树:
3.GPIO:
4.TIM2(通道2 PA1输入捕获):
5.TIM17(通道1 PA7输出PWM):
6.ADC2(初始化通道17 自己复制通道17的函数进行通道13初始化):
7.UART:
8.NVIC优先级配置 文章来源地址https://www.toymoban.com/news/detail-405883.html
文章来源地址https://www.toymoban.com/news/detail-405883.html
二、代码相关定义、声明
1.变量声明
unsigned char jiemian;//显示界面 0为数据界面 1为参数界面 2为记录界面
unsigned char out_mode;//输出模式 0为倍频模式 1为分频模式
unsigned char disp_mode;//LCD显示模式 0为正向显示模式 1为翻转显示模式
unsigned char rec_chanel;//通道记录结果 0为PA4通道记录结果 1为PA5通道记录结果
unsigned char f=1;//频率参数
unsigned char v=1;//电压参数
unsigned int PA1;//PUSL1测频变量
unsigned char uled;//LED显示参数
unsigned char tx[21],rx,rx_buf[21],dex;//串口相关变量
unsigned char e2prom[5];//EEPROM存储数组
typedef struct
{
float value;//当前测量电压数据
float memrory[100];//记录电压数据数组
float all;//已测所有电压数据的总和
float average;//当前所测电压数据的平均值
unsigned int n;//电压数据记录次数
} AO;
AO PA4,PA5;
2.函数声明
void Key_Proc();
void Lcd_Proc();
void Uart_Proc();
void Led_Proc();
三、主要函数
1.函数初始化 上电判断并数据载入
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_ADC2_Init();
MX_TIM2_Init();
MX_TIM17_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
LCD_Init();
LCD_Clear(Black);
LCD_SetBackColor(Black);
LCD_SetTextColor(White);
I2CInit();
IIC_Read(e2prom,0,5);
if((e2prom[2]==0x77)&&(e2prom[3]==0x7A)&&(e2prom[4]==0x64))//不是第一次上电
{
v=e2prom[0];//将EEPROM中存储的电压参数赋值给变量
f=e2prom[1];//将EEPROM中存储的频率参数赋值给变量
}
else//是第一次上电
{
e2prom[0]=v;//将初始电压参数存储在EEPROM中
e2prom[1]=f;//将初始频率参数存储在EEPROM中
e2prom[2]=0x77;e2prom[3]=0x7A;e2prom[4]=0x64;//写入表示已经完成第一次上电的标志
IIC_Write(e2prom,0,5);
}
HAL_TIM_PWM_Start(&htim17,TIM_CHANNEL_1);
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_2);
HAL_UART_Receive_IT(&huart1,&rx,1);
HAL_ADCEx_Calibration_Start(&hadc2,ADC_SINGLE_ENDED);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
Key_Proc();
Lcd_Proc();
Uart_Proc();
Led_Proc();
}
/* USER CODE END 3 */
}
2.按键扫描 EEPROM存储
void Key_Proc()
{
static __IO uint32_t Key_Tick,DKey_Tick;
static unsigned char key_old,key_flag;
unsigned char key_value,key_down,key_up;
if(uwTick-Key_Tick<50)
return;
Key_Tick=uwTick;
key_value=Key_Scan();
key_down=key_value&(key_value^key_old);
key_up=~key_value&(key_value^key_old);
key_old=key_value;
if(key_down!=0)
DKey_Tick=uwTick;
if(uwTick-DKey_Tick>1000)
{
switch(key_up)
{
case 4:
B4_Long_Proc();
break;
}
}
else
{
switch(key_up)
{
case 1:
if(++jiemian>2)//按下B1按键可以往复切换数据、参数和记录三个界面
jiemian=0;
rec_chanel=0;//每次从其它界面切换到记录界面,默认为PA4通道记录结果
LCD_Clear(Black);
break;
case 2:
if(jiemian==1)//参数界面
{
if(++f>4)//调整频率参数(X)的值
f=1;
IIC_Write(&f,1,1);//写入E2PROM内部地址1
}
break;
case 3:
if(jiemian==1)//参数界面
{
if(++v>4)//调整电压参数(Y)的值
v=1;
IIC_Write(&v,0,1);//写入E2PROM内部地址0
}
break;
case 4:
B4_Short_Proc();
break;
}
}
}
3.B4按键短按 双路AD测量电压 计算平均值、最大值、最小值、次数
void B4_Short_Proc()
{
unsigned char i,j;
float temp;
if(jiemian==0)//数据界面
{
PA4.value=Get_PA4()*3.3/4095;PA5.value=Get_PA5()*3.3/4095;//启动一次电压测量
PA4.memrory[PA4.n]=PA4.value;PA5.memrory[PA5.n]=PA5.value;//将测得的电压数据存入数组中
for(i=0;i<PA4.n;i++)//冒泡法排序
{
for(j=i+1;j<PA4.n+1;j++)
{
if(PA4.memrory[i]>PA4.memrory[j])
{
temp=PA4.memrory[i];
PA4.memrory[i]=PA4.memrory[j];
PA4.memrory[j]=temp;
}
}
}
PA4.n++;//表示当前PA4的测量次数
for(i=0;i<PA5.n;i++)//冒泡法排序
{
for(j=i+1;j<PA5.n+1;j++)
{
if(PA5.memrory[i]>PA5.memrory[j])
{
temp=PA5.memrory[i];
PA5.memrory[i]=PA5.memrory[j];
PA5.memrory[j]=temp;
}
}
}
PA5.n++;//表示当前PA5的测量次数
for(i=0;i<PA4.n;i++)//计算当前已测量PA4电压数据的总和
{
PA4.all+=PA4.memrory[i];
}
PA4.average=PA4.all/PA4.n;//当前所测PA4电压数据的平均值
PA4.all=0;//当前已测量PA4电压数据的总和清零 以防止下次计算出错
for(i=0;i<PA5.n;i++)//计算当前已测量PA5电压数据的总和
{
PA5.all+=PA5.memrory[i];
}
PA5.average=PA5.all/PA5.n;//当前所测PA5电压数据的平均值
PA5.all=0;//当前已测量PA5电压数据的总和清零 以防止下次计算出错
}
else if(jiemian==1)//参数界面
out_mode^=1;//PA7脉冲输出模式切换
else//记录界面
rec_chanel^=1;//不同测量通道的记录结果切换
}
4.B4按键长按 数据清零
void B4_Long_Proc()
{
unsigned char i,j;
if(jiemian==2)//记录界面
{
if(rec_chanel==0)//当前为PA4测量通道的记录结果
{
for(i=0;i<PA4.n;i++)
{
PA4.memrory[i]=0;//将数组中测得的PA4电压数据清零
}
PA4.average=0;//当前所测PA4电压数据的平均值清零
PA4.value=0;//当前测量PA4电压数据清零
PA4.n=0;//当前测量PA4电压数据次数清零
}
else//当前为PA5测量通道的记录结果
{
for(i=0;i<PA5.n;i++)
{
PA5.memrory[i]=0;//将数组中测得的PA5电压数据清零
}
PA5.average=0;//当前所测PA5电压数据的平均值清零
PA5.value=0;//当前测量PA5电压数据清零
PA5.n=0;//当前测量PA5电压数据次数清零
}
}
}
5.LCD显示 PA7脉冲输出模式配置
void Lcd_Proc()
{
static __IO uint32_t Lcd_Tick;
unsigned char lcd_string[21];
if(uwTick-Lcd_Tick<100)
return;
Lcd_Tick=uwTick;
if(out_mode==0)//倍频模式
{
__HAL_TIM_SET_AUTORELOAD(&htim17,PA1/f-1);//设置频率
__HAL_TIM_SET_COMPARE(&htim17,TIM_CHANNEL_1,0.5*PA1/f);//设置占空比
}
else//分频模式
{
__HAL_TIM_SET_AUTORELOAD(&htim17,PA1*f-1);//设置频率
__HAL_TIM_SET_COMPARE(&htim17,TIM_CHANNEL_1,0.5*PA1*f);//设置占空比
}
if(jiemian==0)//数据界面
{
sprintf((char*)lcd_string," DATA");//显示界面名称DATA
LCD_DisplayStringLine(Line1,lcd_string);
sprintf((char*)lcd_string," PA4=%4.2f",PA4.value);//显示PA4电压数据
LCD_DisplayStringLine(Line3,lcd_string);
sprintf((char*)lcd_string," PA5=%4.2f",PA5.value);//显示PA5电压数据
LCD_DisplayStringLine(Line4,lcd_string);
sprintf((char*)lcd_string," PA1=%d ",1000000/PA1);//显示PA1脉冲频率
LCD_DisplayStringLine(Line5,lcd_string);
}
else if(jiemian==1)//参数界面
{
sprintf((char*)lcd_string," PARA");//显示界面名称PARA
LCD_DisplayStringLine(Line1,lcd_string);
sprintf((char*)lcd_string," X=%d",f);//显示频率参数(X)
LCD_DisplayStringLine(Line3,lcd_string);
sprintf((char*)lcd_string," Y=%d",v);//显示电压参数(Y)
LCD_DisplayStringLine(Line4,lcd_string);
}
else//记录界面
{
if(rec_chanel==0)//当前为PA4测量通道的记录结果
{
sprintf((char*)lcd_string," REC-PA4");//显示界面名称REC-PA4
LCD_DisplayStringLine(Line1,lcd_string);
sprintf((char*)lcd_string," N=%d ",PA4.n);//显示电压数据记录次数(N)
LCD_DisplayStringLine(Line3,lcd_string);
sprintf((char*)lcd_string," A=%4.2f",PA4.memrory[PA4.n-1]);//显示电压最大值(A)
LCD_DisplayStringLine(Line4,lcd_string);
sprintf((char*)lcd_string," T=%4.2f",PA4.memrory[0]);//显示电压最小值(T)
LCD_DisplayStringLine(Line5,lcd_string);
sprintf((char*)lcd_string," H=%4.2f",PA4.average);//显示平均值(H)
LCD_DisplayStringLine(Line6,lcd_string);
}
else//当前为PA5测量通道的记录结果
{
sprintf((char*)lcd_string," REC-PA5");//显示界面名称REC-PA5
LCD_DisplayStringLine(Line1,lcd_string);
sprintf((char*)lcd_string," N=%d ",PA5.n);//显示电压数据记录次数(N)
LCD_DisplayStringLine(Line3,lcd_string);
sprintf((char*)lcd_string," A=%4.2f",PA5.memrory[PA5.n-1]);//显示电压最大值(A)
LCD_DisplayStringLine(Line4,lcd_string);
sprintf((char*)lcd_string," T=%4.2f",PA5.memrory[0]);//显示电压最小值(T)
LCD_DisplayStringLine(Line5,lcd_string);
sprintf((char*)lcd_string," H=%4.2f",PA5.average);//显示平均值(H)
LCD_DisplayStringLine(Line6,lcd_string);
}
}
}
6.判断串口接收数据是否合法
unsigned char isRxCplt()
{
if(dex==0)//未接收到数据
return 0;
else if((dex==1)&&(rx_buf[0]=='X'))//接收到1位数据 且该数据为X
return 1;
else if((dex==1)&&(rx_buf[0]=='Y'))//接收到1位数据 且该数据为Y
return 2;
else if((dex==3)&&(rx_buf[0]=='P')&&(rx_buf[1]=='A')&&(rx_buf[2]=='1'))//接收到3位数据 且该数据为PA1
return 3;
else if((dex==3)&&(rx_buf[0]=='P')&&(rx_buf[1]=='A')&&(rx_buf[2]=='4'))//接收到3位数据 且该数据为PA4
return 4;
else if((dex==3)&&(rx_buf[0]=='P')&&(rx_buf[1]=='A')&&(rx_buf[2]=='5'))//接收到3位数据 且该数据为PA5
return 5;
else if((dex==1)&&(rx_buf[0]=='#'))//接收到1位数据 且该数据为#
return 6;
else//接收到其他数据
return 7;
}
7.串口通讯 屏幕显示模式切换
void Uart_Proc()
{
static __IO uint32_t Uart_Tick;
if(uwTick-Uart_Tick<50)
return;
Uart_Tick=uwTick;
if(isRxCplt()==1)//返回当前频率参数
{
sprintf((char*)tx,"X:%d\r\n",f);
HAL_UART_Transmit(&huart1,tx,strlen(tx),50);
}
else if(isRxCplt()==2)//返回当前电压参数
{
sprintf((char*)tx,"Y:%d\r\n",v);
HAL_UART_Transmit(&huart1,tx,strlen(tx),50);
}
else if(isRxCplt()==3)//返回PA1通道实时测量到的频率数据
{
sprintf((char*)tx,"PA1:%d\r\n",1000000/PA1);
HAL_UART_Transmit(&huart1,tx,strlen(tx),50);
}
else if(isRxCplt()==4)//返回PA4通道当前测量到的电压数据
{
sprintf((char*)tx,"PA4:%4.2f\r\n",PA4.value);
HAL_UART_Transmit(&huart1,tx,strlen(tx),50);
}
else if(isRxCplt()==5)//返回PA5通道当前测量到的电压数据
{
sprintf((char*)tx,"PA5:%4.2f\r\n",PA5.value);
HAL_UART_Transmit(&huart1,tx,strlen(tx),50);
}
else if(isRxCplt()==6)//切换LCD屏幕显示模式
{
disp_mode^=1;
if(disp_mode==0)//正向显示模式
{
LCD_WriteReg(R1 , 0x0000);
LCD_WriteReg(R96 , 0x2700);
LCD_Clear(Black);
}
else//翻转显示模式
{
LCD_WriteReg(R1 , 0x0100);
LCD_WriteReg(R96 , 0xA700);
LCD_Clear(Black);
}
}
else if(isRxCplt()==7)//接收错误数据 返回ERROR
{
sprintf((char*)tx,"ERROR\r\n");
HAL_UART_Transmit(&huart1,tx,strlen(tx),50);
}
dex=0;//串口缓冲数组索引清零
}
8.LED点亮、熄灭、闪烁
void Led_Proc()
{
static __IO uint32_t Led_Tick;
if(uwTick-Led_Tick<100)//以0.1秒为间隔扫描
return;
Led_Tick=uwTick;
if(out_mode==0)//脉冲输出模式为倍频时点亮
uled|=0x01;
else//否则熄灭
uled&=~0x01;
if(out_mode==1)//脉冲输出模式为分频时点亮
uled|=0x02;
else//否则熄灭
uled&=~0x02;
if(PA4.value>PA5.value*v)//当VPA4>VPA5*电压参数时,指示灯LD3以0.1秒为间隔切换亮灭状态
uled^=0x04;
else//否则熄灭
uled&=~0x04;
if(disp_mode==0)//正向显示模式点亮
uled|=0x08;
else//翻转显示模式熄灭
uled&=~0x08;
Led_Disp(uled);//LED显示函数
}
9.输入捕获回调函数 频率测量范围100Hz-10kHz
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM2)//发生中断的定时器为定时器2
{
if(htim->Channel==HAL_TIM_ACTIVE_CHANNEL_2)//发生中断的通道为通道2
{
PA1=HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_2)+1;//读取当前定时器的数值
if(1000000/PA1>10000)//频率<100时 钳制在100
PA1=100;
else if(1000000/PA1<100)//频率>10k时 钳制在10k
PA1=10000;
}
}
}
10.串口中断回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
rx_buf[dex++]=rx;//一位一位存入缓存数组,索引+1
HAL_UART_Receive_IT(&huart1,&rx,1);//重新开启接收中断
}
四、经验与感受 细节剖析(后续补充)
五、链接
1.第十三届蓝桥杯嵌入式国赛PDF
2.第十三届蓝桥杯嵌入式省赛第一场真题(基于HAL库的巨简代码+超级详解)
3.第十三届蓝桥杯嵌入式省赛第二场真题(基于HAL库的巨简代码+超级详解)
4.第十二届蓝桥杯嵌入式省赛第一场真题(基于HAL库的巨简代码+超级详解)
到了这里,关于第十三届蓝桥杯嵌入式国赛真题(基于HAL库的巨简代码+超级详解)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!