前言
控制步进电机可以使用PWM、定时器中断、延时,这里用的就是
定时器中断来让它转动。
一、硬件部分
1.使用的硬件
板子用的是正点原子的STM32F103 mini板,驱动器是DM420(DM420驱动器资料),用开关电源供电,电机就是普通的42步进电机,步距角为1.8°,虽然按照图片来看它是个蠕动泵。如下图
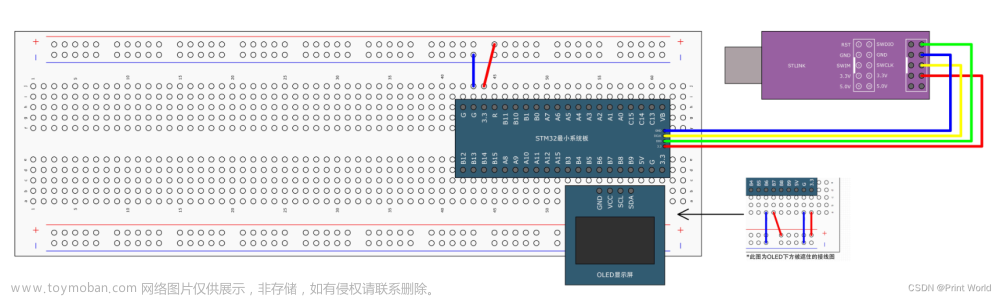
2.硬件连接
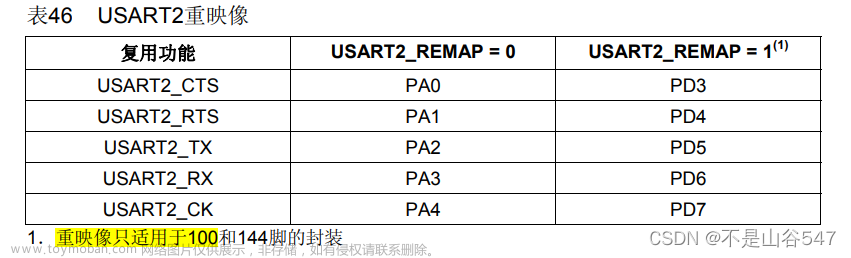
PUL+——PB0,脉冲输入
DIR+——PB1,方向使能
ENA+——PB2,脱机使能,共阴极接法的话,输入低电平,让它无效。
这里连接驱动器采用共阴极接法,如图
3.总硬件连接图

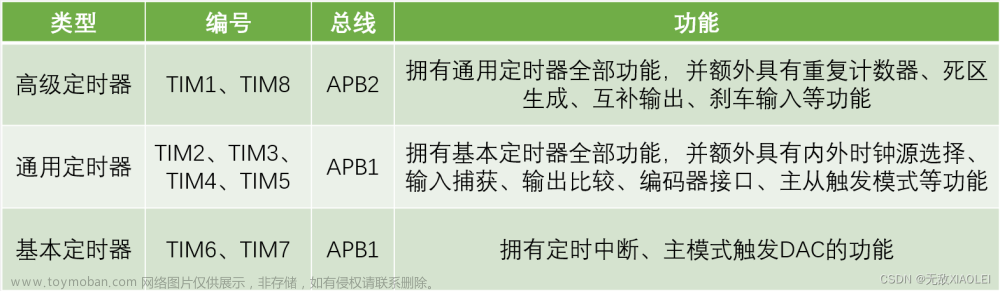
二、控制步进电机转动
想让它转,简单的说就是高电平,低电平循环输入,产生脉冲,让它转动。
其转速与产生脉冲频率有关:
arr:自动重装载寄存器的值
psc:定时器频率
α为步距角(1.8°),x为驱动器细分倍数(设置为2,也就是说转动一圈需要400个脉冲,每个脉冲转动0.9度)
脉冲频率 = Fck_int(72MHZ) / ((arr+1)*(psc+1))
转速(r/min)= 脉冲频率 * 60 / ((360/α)*x)
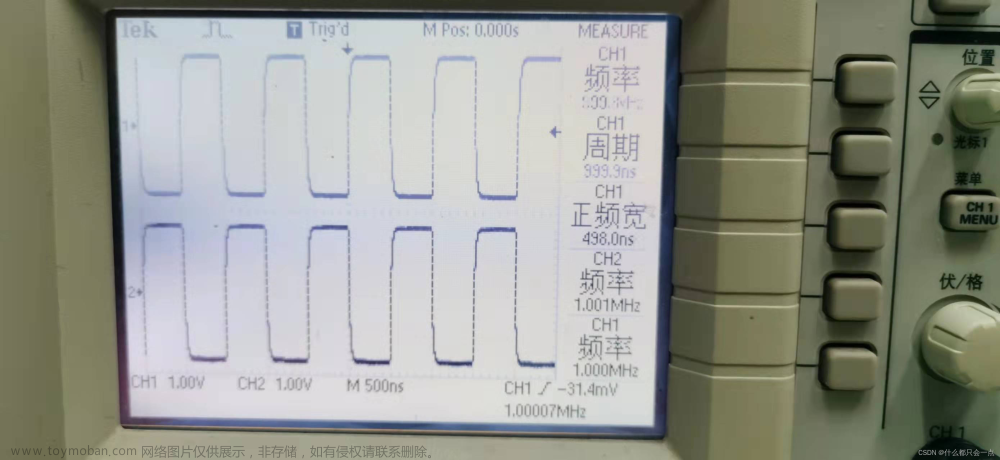
假如我将arr设置为100-1,psc设置为7200-1,则脉冲频率为100Hz,转速为15r/min.文章来源:https://www.toymoban.com/news/detail-406142.html
三、电机驱动代码
1.GPIO.h
#ifndef __GPIO_H
#define __GPIO_H
#include "sys.h"
#define LED0 PAout(8) // PA8,测试是否进入中断
#define PUL PBout(0) //脉冲输出
#define DIR PBout(1) //方向使能
#define ENA PBout(2) //脱机使能
void GPIO_Init(void);//端口初始化
#endif
2.timer.c
#include "timer.h"
#include "led.h"
void TIM3_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能
TIM_TimeBaseStructure.TIM_Period = arr;
TIM_TimeBaseStructure.TIM_Prescaler =psc;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //初始化TIMx的时间基数单位
TIM_ITConfig(TIM3,TIM_IT_Update ,ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //初始化外设NVIC寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIMx外设
}
void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3,TIM_IT_Update)!=RESET)//是否发生中断
{
PUL = !PUL;
LED0 = !LED0;
}
TIM_ClearITPendingBit(TIM3,TIM_IT_Update); //清除TIMx的中断待处理位:TIM 中断源
}
3.main.c
#include "GPIO.h"
#include "delay.h"
#include "sys.h"
#include "timer.h"
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);// 设置中断优先级分组2
GPIO_Init(); //初始化连接的硬件接口
ENA = 0; //脱机使能失效
TIM3_Int_Init(99,7199);//72MHz / ((99+1)*(7199+1)) =100Hz
while(1)
{
;
}
}
代码文件
CSDN:https://download.csdn.net/download/weixin_51649181/32713617
对于一些积分/C币不够的小伙伴对于一些积分/C币不够的小伙伴,链接就放这了:
https://pan.baidu.com/s/12mM-IK6k8j8O1BH9czQbDA
提取码:rv6t
如果你觉得好的话可以给我点个赞!文章来源地址https://www.toymoban.com/news/detail-406142.html
到了这里,关于用STM32定时器中断产生PWM控制步进电机的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!