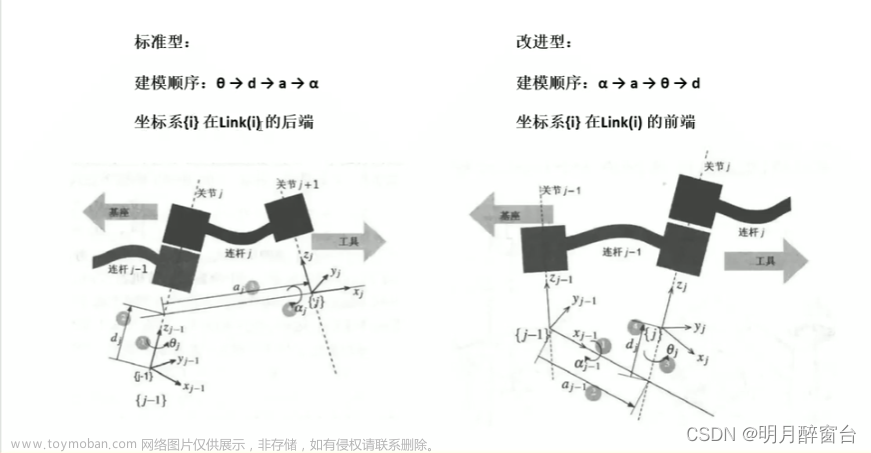
下面在前面的ur5机械臂的DH参数基础是对其正逆解进行求解,为了后面能在MATLAB中利用stl文件进行实际显示,这里以标准DH参数为例进行讲解。(修正DH参数在用plot3d函数是显示失败,不知道是不是这个函数只能显示标准dh参数的机械臂模型,有知道的网友可以在评论里告知一下,谢谢。)
一、运动学正解:
机器人正运动学是在已知各连杆相对位置关系(关节角)的情况下,得到末端执行器的位姿。在标准DH参数下相邻坐标系之间的齐次变换矩阵为:

则,正解代码如下:
function [T06,Pos]=ForwardSolver_MDH(theta)
DH_JXB =[90 0 144 0;
0 264 0 90;
0 236 0 0;
-90 0 106 -90;
90 0 114 0;
0 0 67 0];
d=DH_JXB(1:6,3);
a=DH_JXB(1:6,2);
DH_JXB(1:6,1)=DH_JXB(1:6,1)/180*pi; %度数转化为弧度
alp=DH_JXB(1:6,1);
offset=[0 90 0 -90 0 0];
theta=(theta+offset)*pi/180;
for i=1:6
T{i}=[ cos(theta(i)), -sin(theta(i))*cos(alp(i)), sin(theta(i))*sin(alp(i)), a(i)*cos(theta(i));
sin(theta(i)), cos(theta(i))*cos(alp(i)),
-cos(theta(i))*sin(alp(i)), a(i)*sin(theta(i));
0, sin(alp(i)), cos(alp(i)), d(i);
0, 0, 0, 1
]
end
disp('Homogeneous transformation matrix T06:')
T06=T{1}*T{2}*T{3}*T{4}*T{5}*T{6}
%% 求末端位置
X=T06(1,4);Y=T06(2,4);Z=T06(3,4);
%% 求末端姿态Rotations about X, Y, Z axes (for a robot gripper)
R=T06;
if abs(abs(R(1,3)) - 1) < eps % when |R13| == 1
% singularity
rpy(1) = 0; % roll is zero
if R(1,3) > 0
rpy(3) = atan2( R(3,2), R(2,2)); % R+Y
else
rpy(3) = -atan2( R(2,1), R(3,1)); % R-Y
end
rpy(2) = asin(R(1,3));
else
rpy(1) = -atan2(R(1,2), R(1,1));
rpy(3) = -atan2(R(2,3), R(3,3));
rpy(2) = atan(R(1,3)*cos(rpy(1))/R(1,1));
end
RPY=rpy*180/pi;
Rall=RPY(1);Pitch=RPY(2);Yaw=RPY(3);
Pos=[X,Y,Z,Rall,Pitch,Yaw];
end这里对姿态的描述进行说明:在MATLAB中RPY欧拉角是世界坐标系下的XYZ欧拉角;
RPY角的定义如下:

输入端位姿形式为:
MATLAB中对应的RPY旋转矩阵如下:

这是个旋转矩阵,与齐次矩阵中的旋转矩阵等价,所以根据齐次矩阵中的旋转矩阵便可以得到末端的姿态RPY。

二、运动学逆解:
机器人逆运动学是已知机器人末端执行器的位姿,通过变换矩阵T得到机器人各关节的角度。求解逆运动学有解析法、几何法、迭代法。这里介绍解析法。如果机器人末端三轴的轴线始终交于一点则该机器人必有解析解。
1、得到齐次变换矩阵:文章来源:https://www.toymoban.com/news/detail-406542.html
利用MATLAB求解其齐次变换矩阵:文章来源地址https://www.toymoban.com/news/detail-406542.html
syms a1 a2 a3 a4 a5 a6 d1 d2 d3 d4 d5 d6 a1p1 a1p2 a1p3 a1p4 a1p5 a1p6 th1 th2 th3 th4 th5 th6;
a=[0 a2 a3 0 0 0];
d=[d1 0 0 d4 d5 d6];
alp=[90 0 0 -90 90 0]*pi/180;
theta=[th1 th2 th3 th4 th5 th6];
% theta(1)=t1;theta(2)=t2;theta(3)=t3;theta(4)=t4;theta(5)=t5;theta(6)=t6;
T01=[ cos(theta(1)), 0, sin(theta(1)), a(1)*cos(theta(1));
sin(theta(1)), 0, -cos(theta(1)), a(1)*sin(theta(1));
0, 1, 0, d(1);
0, 0, 0, 1
];
T12=[ cos(theta(2)), -sin(theta(2)), 0, a(2)*cos(theta(2));
sin(theta(2)), cos(theta(2)), 0, a(2)*sin(theta(2));
0,到了这里,关于(6)六轴机械臂的运动学正、逆解的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!