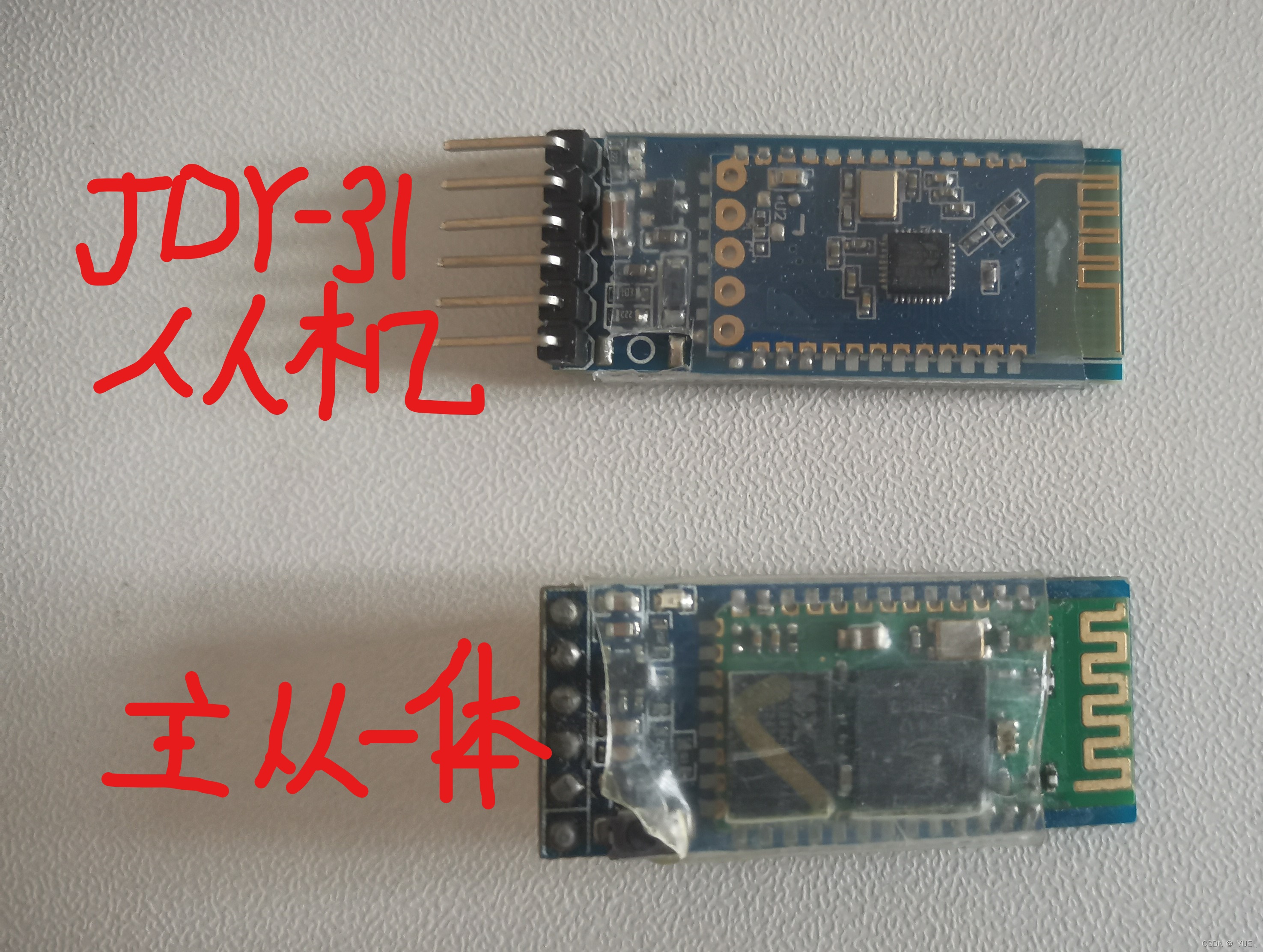
HC-05是一款主从一体化的蓝牙模块,因此其使用起来比较方便,只需要进行简单的配置即可。
本文就手把手的介绍小白入手模块后如何使用。
对于模块使用:1、蓝牙配置→2、手机与蓝牙的传输→3、手机通过蓝牙模块控制单片机→4、一对蓝牙之间主—从传输数据,这是一个循循渐进的过程。
一、蓝牙的配置
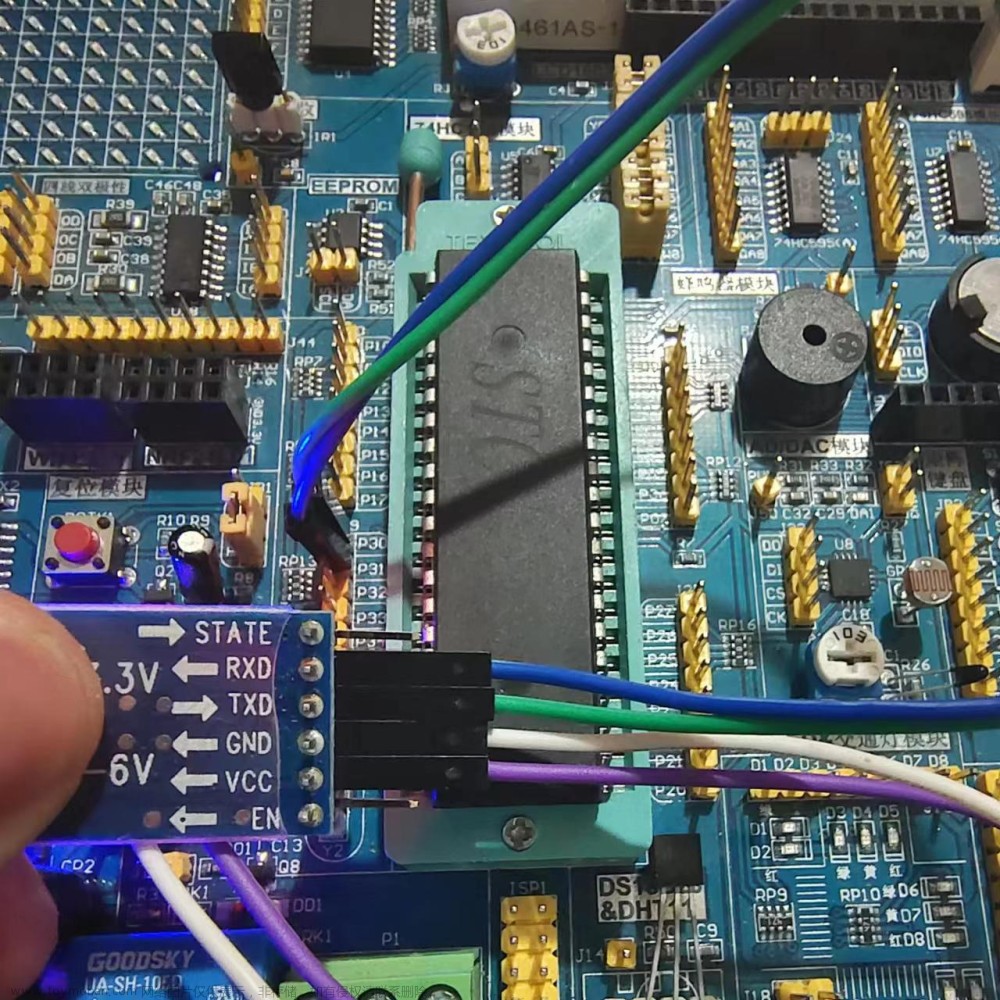
①做好准备工作:接线(需要一个CH340 USB→TTL模块)。

CH340模块 HC-05模块
VCC(5V) —————————— VCC
GND —————————— GND
RXD —————————— TXD
TXD —————————— RXD
②蓝牙模块有两种工作模式:命令相应模式、自动连接模式;
首先说一下如何进入命令响应模式与自动连接模式:
i 命令响应模式:在蓝牙模块中有一个小按键,将HC-05与CH340连接后长按着按钮给模块上电,led灯快闪。
ii自动连接模式:什么也不用管,将HC-05与CH340连接后,插上电脑上电即可,led慢闪。
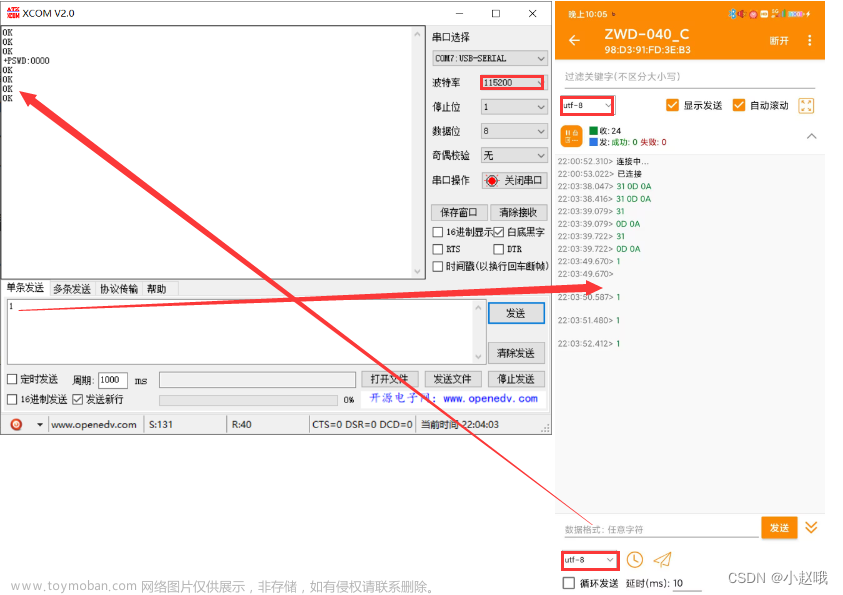
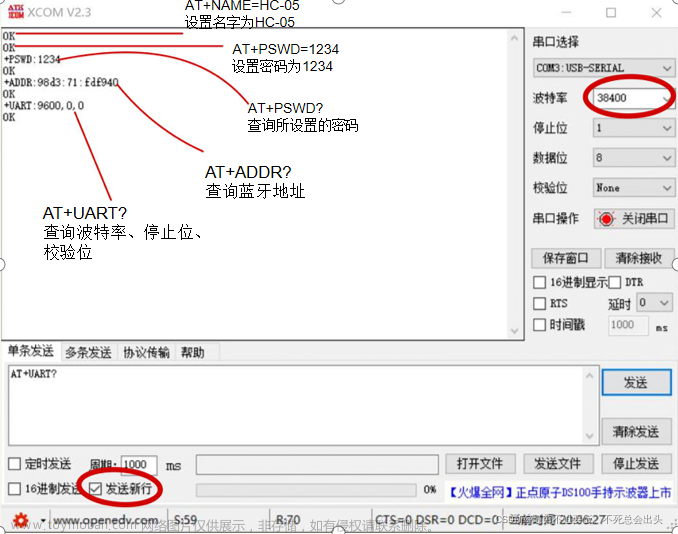
命令响应模式:是用AT对蓝牙模块工作的配置(相当于蓝牙模块的初始化配置各种参数)
波特率固定为:38400(即向HC-05写AT指令时波特率为38400)
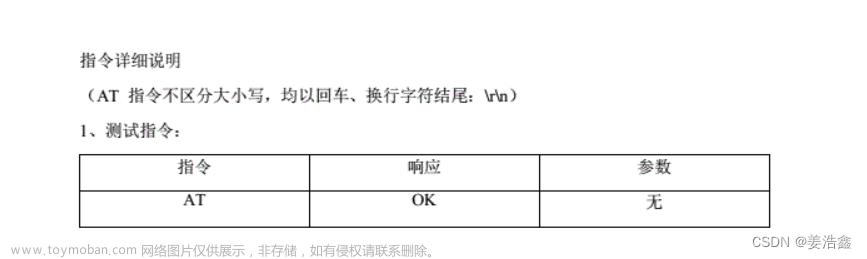
常用的几种AT指令:(选上发送新行)
| 指令名 | 响应 | 含义 |
| AT+RESET |
OK | 模块复位 |
| AT+ORGL |
OK | 恢复默认状态 |
| AT+ADDR? |
+ADDR:Param OK |
获得蓝牙模块地址 |
| AT+NAME=Param |
OK | 设置设备名称 Parm:想要设置的名字 |
| AT+NAME? |
+NAME:Param OK |
获得设备名称 |
| AT+PSWD=Param |
OK |
设置模块密码 Parm:想要设置的密码;,默认为“1234” |
| AT+PSWD? |
+PSWD:Param OK |
获得模块密码 |
| AT+UART=Param1,Param2,Param3 |
OK |
设置串口参数 Param1:波特率 ; Param2:停止位 ;Param3:校验位 |
| AT+UART? |
+UART:Param1,Param2,Param3 OK |
获得串口参数 |
| AT+ROLE=Param | +ROLE:Param OK | Param:参数取值如下:0—从角色;1—主角色;2—回环角色;默认值:0 |
AT指令错误返回
| 错误码 | 说明 |
| 0 | AT 命令错误 |
| 1 | 指令结果为默认值 |
| 2 | PSKEY 写错误 |
| 3 | 设备名称太长(超过 32 个字 |
举例:
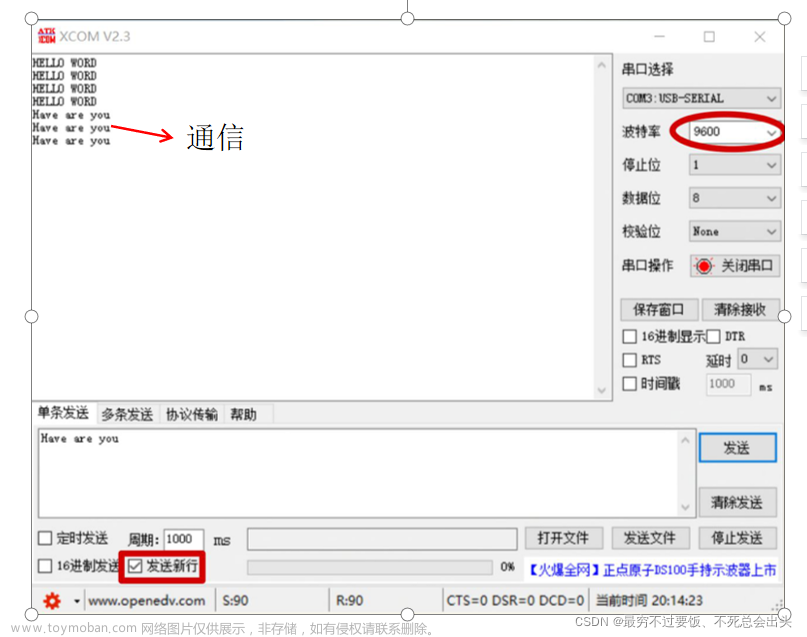
自动连接模式:将自动根据命令响应模式下事先设定的方式连接的数据传输(在该模式下才能与手机等其他蓝牙设备连接) 波特率默认:9600(即HC-05与其他蓝牙通信时默认波特率为9600)
二、手机与蓝牙的连接
想要手机与蓝牙进行传输数据,首先肯定要建立手机与蓝牙的连接,(和我们用的蓝牙耳机差不多,首先得先在手机上找到蓝牙设备,并进行连接),那么问题来了,应该如何连接。
第一步:配置蓝牙模块基本信息
AT+NAME=HC-05 修改蓝牙模块名称为HC-05
AT+ROLE=0 蓝牙模式为从模式
AT+CMODE=1 蓝牙连接模式为任意地址连接模式,也就是说 该模块可以被任意蓝牙设备连接
AT+PSWD=1234 蓝牙配对密码为1234
AT+UART=9600,0,0 蓝牙通信串口波特率为9600,停止位1位, 无校验位
第二步:在手机上下载“蓝牙调试助手”
本人所用的蓝牙串口助手是自己使用appinventor开发的app,功能还算可以,若大家有更好用的app可以将下载连接放在评论区,共享一下!!!嘿嘿嘿
此处是下载连接:链接:https://pan.baidu.com/s/1r21BoQ8snUzCl0Iy59Pzgw
提取码:yzh0

连接步骤:1、在手机连接之前,一定要现在设置中与蓝牙模块配对,然后再用蓝牙app连接蓝牙
2、打开蓝牙APP,点击左上角连接蓝牙模块,app右上角显示当前连接是否成功(若连 接失败,检查蓝牙模块是否正常,没问题重新连接即可)。
三、用手机通过蓝牙控制单片机
1、蓝牙app端

手机蓝牙串口助手向单片机 发送“1”,点亮LED灯。
发送"0",关闭LED灯。
蓝牙串口助手,有编辑名称按键、编辑发送数据按键。 通过给按钮赋值,发送需要的数据,方便快捷。



2、单片机端(代码处理接收到的数据,执行相应的功能)
①51单片机程序:
/*****************************************************************
接线方式:
单片机的TXD-->HC-05的RXD
单片机的RXD-->HC-05的TXD
P1.0口 接 LED的阴极
VCC 接 LED的阳极
*****************************************************************/
#include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
sbit LED=P1^0;
/*****************************************************************
*接收中断服务子程序
*****************************************************************/
void Uart_Isr(void) interrupt 4
{
uchar Recv;
if(RI==1)
{
RI=0;
Recv = SBUF; //接收数据
if(Recv == '1')
{
LED = 0;//接收到1亮灯
}
else
{
LED = 1; //其他情况灯灭
}
}
}
/*****************************************************************
*串口初始化
*****************************************************************/
void Uart_Init(void)
{
SCON = 0x50; //方式1 8位数据 接收地址甄别禁止 接收使能 0101 0000
PCON = 0x00; //波特率不增倍
TMOD = 0x20; //T1,8位自动重装
TH1 = 0xfd; //波特率9600
TL1 = 0xfd;
EA = 1;
ES = 1;
TR1 = 1; //启动t1
}
/*****************************************************************
*主程序
*****************************************************************/
void main(void)
{
Uart_Init();
while(1);
}②:stm32程序
main.c:
int main(void)
{
u8 receive_data;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //NVIC分组2:2位抢占优先级,2位响应优先级
delay_Init(); // 延时初始化(注:调用延时函数之前,必须先调用delay_Init()将SysTick初始化)
uart2_init(9600);
while(1)
{
if(USART_GetFlagStatus(USART2,USART_FLAG_RXNE)==1)
{
receive_data=USART_ReceiveData(USART2);
if(receive_data == 0x31) // PA1输出高,点亮LED
{
GPIO_SetBits(GPIOA,GPIO_Pin_1);
}
else if(receive_data == 0x30) // PA1输出高,点亮LED
{
GPIO_ResetBits(GPIOA,GPIO_Pin_1);
}
}
}
}uart2.c
#include "usart2.h"
//
//如果使用ucos,则包括下面的头文件即可.
#if SYSTEM_SUPPORT_OS
#include "includes.h" //ucos 使用
#endif
void uart2_init( u32 bound )
{
/* GPIO端口设置 */
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA, ENABLE );
RCC_APB1PeriphClockCmd( RCC_APB1Periph_USART2, ENABLE ); /* 使能USART1,GPIOA时钟 */
/* PA2 TXD2 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init( GPIOA, &GPIO_InitStructure );
/* PA3 RXD2 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init( GPIOA, &GPIO_InitStructure );
/* USART 初始化设置 */
USART_InitStructure.USART_BaudRate = bound; /* 串口波特率 */
USART_InitStructure.USART_WordLength = USART_WordLength_8b; /* 字长为8位数据格式 */
USART_InitStructure.USART_StopBits = USART_StopBits_1; /* 一个停止位 */
USART_InitStructure.USART_Parity = USART_Parity_No; /* 无奇偶校验位 */
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; /* 无硬件数据流控制 */
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; /* 收发模式 */
USART_Init( USART2, &USART_InitStructure ); /* 初始化串口1 */
USART_Cmd( USART2, ENABLE ); /* 使能串口 2 */
}四、两个蓝牙之间的主---从模式
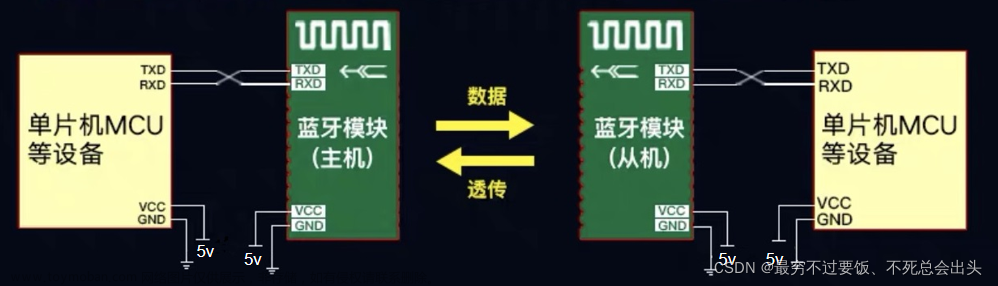
用于两个单片机中间非连线通讯
这时需要两个蓝牙模块,将其中一个设置成主机,另一个设置成从机。
(主蓝牙) (从蓝牙)
AT+NAME=CH-05-Z AT+NAME=CH-05-C (设置蓝牙名称)
AT+PSWD=1234 AT+PSWD=1234 (设置蓝牙密码)
AT+ROLE=1 AT+ROLE=0 (设置主从:0为从1为主)
AT+ADDR? AT+ADDR? (查询蓝牙地址)
AT+UART:9600,0,0 AT+UART:9600,0,0 (设置波特率9600)
AT+LINK=从蓝牙地址(蓝牙相互连接) AT+BIND=master的地址(查询之后绑定主蓝)
注意:一定要保证两蓝牙的密码一样 文章来源:https://www.toymoban.com/news/detail-406596.html
以上配置可以在电脑端通过串口调试助手配置好,然后单片机接上蓝牙模块即可,模块上电后主从机会自动建立连接,连接成功后,主从机就可以通过串口通信了(透传模式 :发什么收什么)。文章来源地址https://www.toymoban.com/news/detail-406596.html
到了这里,关于HC-05(ZS-040)蓝牙模块使用详情(蓝牙模块配置、手机蓝牙控制单片机、蓝牙与蓝牙之间的通信)含51、32程序的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!