提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
前言
ROS小车登录有两种模式:
一、无线连接wifi和ssh登录
二、自建AP热点和ssh登录
一、无线连接wifi和ssh登录
暂略,后补。
二、AP热点和ssh登录
1.ROS小车开机
ROS小车开机会自带热点。
2.电脑连接ROS小车热点
连接好热点后查看属性,找到机器人分配的IP
3.使用putty进入登录页
先输入IP
输入用户名和密码
小车的自建热点配置文件在etc下的create_ap.configure文件
三、地盘启动和键盘控制
1.启动小车底板
用roslaunch base_control 命令启动小车,启动后发出蜂鸣声。这里输出地盘的一些基本信息:硬件版本、固件版本、序列号、设备类型、电机类型、减速比、轮径。
2.查看现在的话题
新开一个终端,rostopic list 打开现在的话题,此时的话题有输出电池的话题、订阅速度话题、输出里程计信息、坐标转换。cmd_vel是我们地盘的节点,需要订阅的话题,不可以发布;odom的发布者是底盘,底盘base_control这个节点来发布。
比如打印电池话题rostopic echo /battery,输出有电压和电流两个信息。
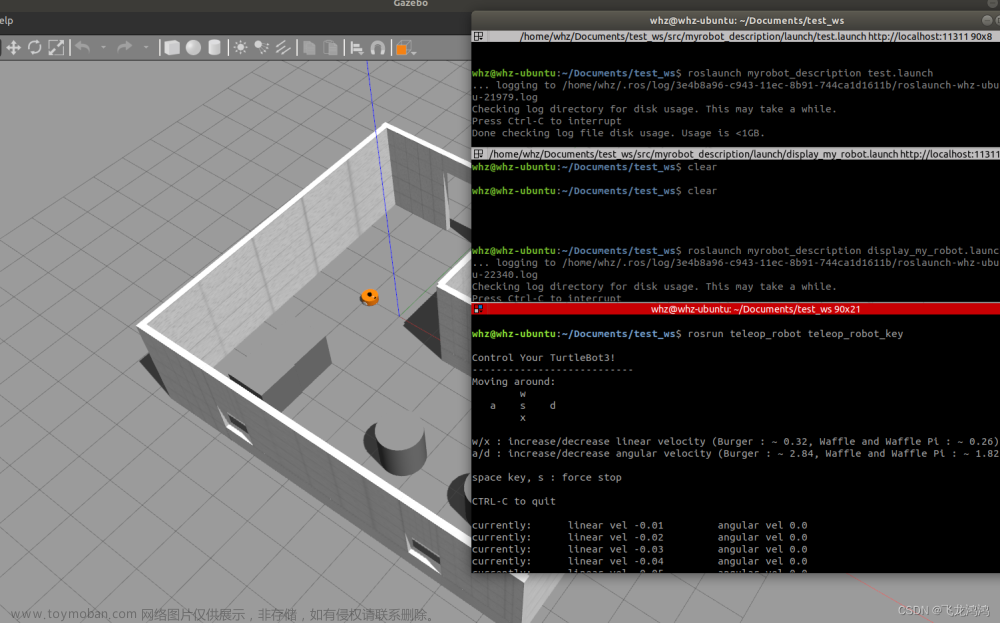
3.键盘控制程序
新建终端,使用rosrun teleop_twist_keyboard teleop_twist_keyboard.py实现键盘遥控,这里有一个简要的说明:i,jl四个键为前后左右,uom>四个键为左前右前左后右后。对于全向移动车型,字母换成大写和shift键组合可以实现一些横向运动。q键增加速度,z键减少速度,角速度和线速度都增减。wx两键是线速度增减,ec两键是角速度增减。然后就可以运动了。可以再次查看对应话题。
4.输出IMU信息
base_control功能包的launch文件下还有一些可配置参数,比如地盘默认不输出imu数据,roslaunch base_control base_control.launch pub_imu:=true,就会多一个imu的信息。 文章来源:https://www.toymoban.com/news/detail-406787.html
文章来源:https://www.toymoban.com/news/detail-406787.html
打印imu信息,rostopic echo/imu , 有传感器的原始信息,有结算后的四元数也有原始角速度信息、线加速度信息 文章来源地址https://www.toymoban.com/news/detail-406787.html
文章来源地址https://www.toymoban.com/news/detail-406787.html
到了这里,关于ROS小车——登录和简单控制(1)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!