0 度量测量
给定相似性测量f和三条轨迹Ti,Tj和Ta
- 如果f满足以下条件,那么称f为一个度量测量
- 唯一性
- 非负性
- 三角不等式
- 对称性
- 唯一性
一些聚类算法(K-means,KNN)、一些数据结构(KD树、ball-Tree)都需要在度量空间中实现
1 基于点之间的距离
1.1 最近对距离 Closest-Pair Distance
从两条轨迹中找到最近的一对点,并计算它们之间的距离

1.2 点对距离和 Sum-of-Pairs Distance
设A,B为点数相同的两条轨迹,其距离定义如下:

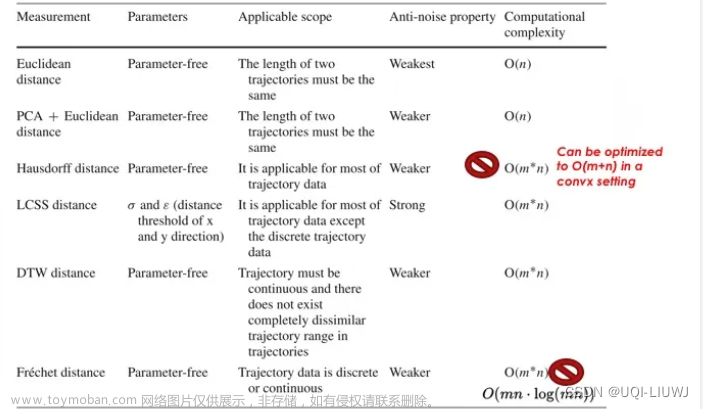
1.3 欧几里得距离


- 优点:线性计算时间
- 缺点:轨迹长度必须一样
1.4 DTW

DTW 笔记: Dynamic Time Warping 动态时间规整 (&DTW的python实现) 【DDTW,WDTW】_UQI-LIUWJ的博客-CSDN博客
- 缺点:对noise比较敏感
- 包括噪声在内的所有点都需要匹配
'Exact Indexing of Dynamic Time Warping' VLDB 2002
1.4.1 DTW不是度量测量
DTW 不满足的举例
- A=[1,1,1,2,2,2]
- B=[1,1,2,2]
- C=[2,2,2,1,1,1]

AB+BC=5
AC=6
不满足三角不等式
1.5 LCSS 最长公共子序列

文巾解题1143. 最长公共子序列_UQI-LIUWJ的博客-CSDN博客

- 优点:对noise不敏感
- 在欧几里得距离和DTW距离中,所有的点都必须匹配,即使它们是离群点
- LCSS允许跳过一些点,而不是重新排列它们
- 缺点:定义threshold比较困难(这里的threshold指的是,如果两点之间的距离小于这个threshold时,将被视为相同的一个点)
DIscovering similar multidimensional trajectories, ICDE 2002

- 比如上图,在这一对threshold的限制下,最长公共弄子序列的长度为2
- 另一个缺点是,它不区分具有相似公共子序列的轨迹(比如上上图,如果两个蓝色区域之间的白色区域长度差距很大,LCSS是不会察觉的)

1.5.1 LCSS 不是度量测量
LCSS 不满足三角不等式的例子
A:[1,2,3,4,5]
B:[3,4]
C:[1,2,3,4,5]
LCSS(A,C)=5,LCSS(A,B)=2,LCSS(B,C)=2
5≥2+2
1.6 字符串编辑举例EDR

算法笔记:字符串编辑距离(Edit Distance on Real sequence,EDR)/ Levenshtein距离_UQI-LIUWJ的博客-CSDN博客
- 优点:
- 对噪声不敏感
- 比LCSS好。EDR会根据两个匹配子轨迹之间的间隙长度对其进行惩罚,这使得EDR比LCSS更精确
- 缺点:同LCSS,不好界定threshold
''' Robust and fast similarity search formoving object trajectories' SigMod 2005
1.6.1 EDR 不是度量测量
EDR 不满足三角不等式的反例:
A=[0],B=[1,2],C=[2,3,3],距离阈值为1
EDR(A,B)=1(0次替换,1次插入)
EDR(B,C)=1(0次替换,1次插入)
EDR(A,C)=3(1次替换,2次插入)
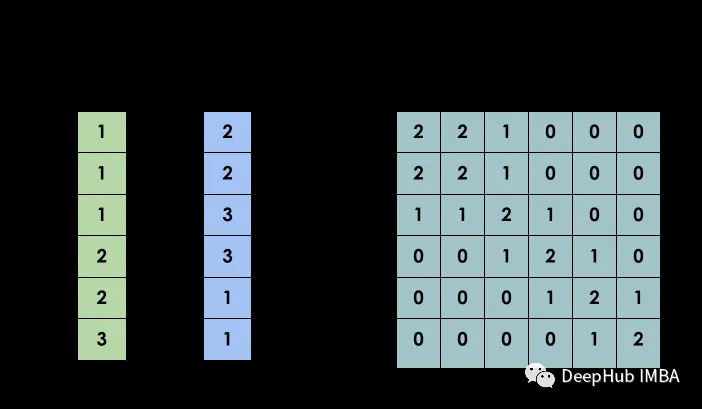
1.6.2 python 实现
import numpy as np
def EDR(TR1,TR2,eps):
m,n = len(TR1)+1,len(TR2)+1
matrix = np.zeros((m,n))
#matrix[i][j]表示 TR1还剩i个元素,TR2还剩j个元素时,他们的编辑距离
for i in range(1,m):
matrix[i][0] = i
for j in range(1,n):
matrix[0][j] = j
#这两个for循环表示,一个轨迹没有元素了,另一个轨迹还有n个元素,那么此时编辑距离为n(插入/删除n个值
for i in range(1,m):
for j in range(1,n):
#print(TR1[i-1],TR2[j-1])
if np.linalg.norm(TR1[i-1]-TR2[j-1])<eps:
cost = 0
else:
cost = 1
#判断两个轨迹对应位置的值是否一致
matrix[i][j]=min(matrix[i-1][j]+1,matrix[i][j-1]+1,matrix[i-1][j-1]+cost)
#删除,插入,替换,这三个操作哪个编辑距离小一点,就选哪个
return matrix
traj1=np.array([[12960834.80288441, 4845269.46493596],
[12960722.25887924, 4845260.76402278],
[12960622.85057397, 4845250.75798203],
[12960572.31152516, 4845244.52233853],
[12960519.880045 , 4845238.86675827],
[12960456.87321322, 4845233.93625503],
[12960381.84387644, 4845232.63112222],
[12960317.0559328 , 4845230.45590127],
[12960236.34930199, 4845214.93933889],
[12960191.93282517, 4845209.13876105],
[12960127.36752052, 4845202.03305778],
[12960066.25312008, 4845200.14787205],
[12960045.32505582, 4845201.30798631],
[12959982.98614098, 4845196.81254434]])
traj2=np.array([[12960127.36752052, 4845202.03305778],
[12960066.25312008, 4845200.14787205],
[12960045.32505582, 4845201.30798631],
[12959982.98614098, 4845196.81254434],
[12959879.57033405, 4845196.37750167],
[12959835.15385723, 4845186.51653973],
[12959837.26892755, 4845187.24161012],
[12959814.89370991, 4845183.18121657],
[12959813.33523704, 4845183.03620255],
[12959809.55037435, 4845182.31113246]])
disEDR=EDR(traj1,traj2,10)
disEDR[-1][-1],disEDR
'''
(14.0,
array([[ 0., 1., 2., 3., 4., 5., 6., 7., 8., 9., 10.],
[ 1., 1., 2., 3., 4., 5., 6., 7., 8., 9., 10.],
[ 2., 2., 2., 3., 4., 5., 6., 7., 8., 9., 10.],
[ 3., 3., 3., 3., 4., 5., 6., 7., 8., 9., 10.],
[ 4., 4., 4., 4., 4., 5., 6., 7., 8., 9., 10.],
[ 5., 5., 5., 5., 5., 5., 6., 7., 8., 9., 10.],
[ 6., 6., 6., 6., 6., 6., 6., 7., 8., 9., 10.],
[ 7., 7., 7., 7., 7., 7., 7., 7., 8., 9., 10.],
[ 8., 8., 8., 8., 8., 8., 8., 8., 8., 9., 10.],
[ 9., 9., 9., 9., 9., 9., 9., 9., 9., 9., 10.],
[10., 10., 10., 10., 10., 10., 10., 10., 10., 10., 10.],
[11., 10., 11., 11., 11., 11., 11., 11., 11., 11., 11.],
[12., 11., 10., 11., 12., 12., 12., 12., 12., 12., 12.],
[13., 12., 11., 10., 11., 12., 13., 13., 13., 13., 13.],
[14., 13., 12., 11., 10., 11., 12., 13., 14., 14., 14.]]))
'''1.7 ERP(实数惩罚编辑距离)
- 上述基于编辑距离的测量方法(DTW\LCSS\EDR)都不是度量的
- ——>索引、聚类、剪枝中往往用不了
- ERP 不需要阈值参数,而是设置一个参考点r进行测量

2 基于形状的距离
2.1 豪斯多夫距离
数学笔记/scipy 笔记:豪斯多夫距离(Hausdorff )_python 豪斯多夫距离_UQI-LIUWJ的博客-CSDN博客

- 缺点:对噪声敏感
The computational geometry of comparing shapes, Efficient algorithms, 2009
2.2 Frechet距离
算法笔记:Frechet距离度量_UQI-LIUWJ的博客-CSDN博客
The computational geometry of comparing shapes, Efficient algorithms, 2009
2.3 上述方法对比
3 基于片段的距离
3.1 One Way Distance
- 轨迹T1到T2的单边轨迹距离
- T1中的点到T2的距离的积分结果,除以T1的距离


- 轨迹T1和T2的对称双边距离
One way distance: for shape based similarity search of moving object trajectories, Geoinformatica 2008

3.2 多线位置距离(Locality In-between Polylines,LIP)


- 表示两个轨迹的第i个交点,
- 表示第i个交点和第i+1个交点之间所夹区域的面积
 文章来源:https://www.toymoban.com/news/detail-410321.html
文章来源:https://www.toymoban.com/news/detail-410321.html
- LIP方法很好理解,当某区域面积的周长占总长比重大时权重也自然就大;
- 当Area均为0时,说明两条轨迹重合没有缝隙,LIP距离为0;
- 当Area加权和大时,则说明两条轨迹之间缝隙较大,LIP距离也就大。
- 此外,权重由区域周长占总长比重的大小而决定,也一定程度对抗了噪音点的干扰。
Similarity search in trajectory databases文章来源地址https://www.toymoban.com/news/detail-410321.html
3.3 EDwP
到了这里,关于轨迹相似度整理的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!