大家好,关于有些新手们买了rockpi4b,或者使用过树莓派的在转rockpi4b的过程中,使用Python中的smbus模块会遇到很多错误,而Python又因为其中的语法特别简单的关系,所以受到了众多程序员的拥戴,而这篇文章主要讲的是使用rockpi4b的时候,和树莓派之间又有什么不同。本人也是在学习rockpi4b的使用,我是没有用过树莓派的经历的,所以我遇到的一些问题都是新手能遇到的问题,所以大家收藏加关注,总有一天你会用到的。。。。。
接线方式:
相信大家和我一样,一开始的时候使用看到rockpi4b和树莓派4b的gpio引脚图长的十分的相似,但是仔细对比一下,又会有一些不同:


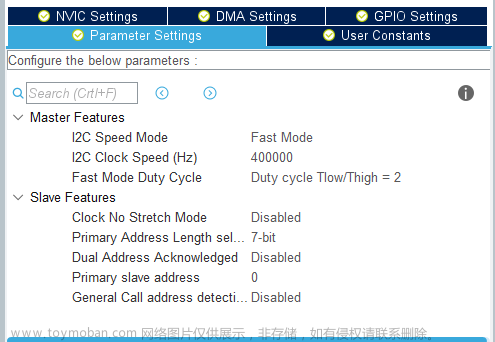
其实在使用的时候,树莓派4b中的很多教程都会交过一个指令就是:文章来源:https://www.toymoban.com/news/detail-411448.html
sudo i2cdetect -y 1这个指令其实意思是搜索i2c里的1通道里设备占用情况,就比如树莓派以ElectronicWings官网里的接线方式连接了mpu6050以后,执行sud文章来源地址https://www.toymoban.com/news/detail-411448.html
到了这里,关于(Rockpi 4b使用心得),Python的smbus模块,mpu6050等模块的使用的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!


![[Arduino ESP32] mpu6050使用笔记(含dmp)](https://imgs.yssmx.com/Uploads/2024/02/675539-1.png)