前言
本文是对mpc模型预测控制学习的记录,主要参照了DR_CAN老师的视频进行学习。视频专栏链接:DR_CAN老师mpc视频专栏。在这篇博客中博主也针对DR_CAN老师的讲解做了详尽的笔记和代码实现。读者可以相结合地进行学习。
mpc算法步骤
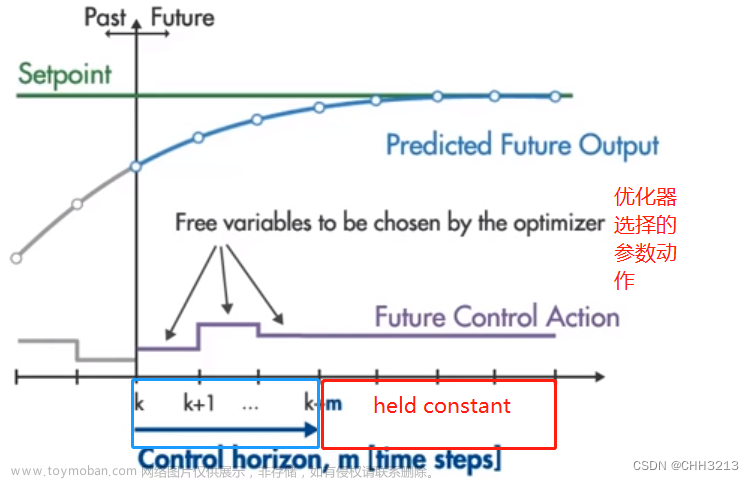
MPC算法主要包括以下三步:
- 估计/测量读取当前系统状态
- 基于 u k , u k + 1 , . . . u k + N u_k,u_{k+1},...u_{k+N} uk,uk+1,...uk+N来进行最优化;
- 只取
u
k
u_k
uk。(Receding Horizon Control)滚动优化控制
为什么只取 u k u_k uk那?这是因为如果系统一次预测太多的控制输入,当系统发生变化或者受到外部扰动的时候,接下来的k+1、k+2等时刻预测的未必准。只取 u k u_k uk的滚动优化控制,可以避免这个问题。
mpc算法推导
考虑一个离散系统,其状态空间表达式为:
系统输出参考值
R
=
0
R=0
R=0,误差为
E
=
y
−
R
=
x
−
0
=
x
E=y-R=x-0=x
E=y−R=x−0=x。
选取这样简单的系统有利于在推导时降低难度。
在k时刻时,我们令:
其中
u
(
k
+
1
∣
k
)
u(k+1|k)
u(k+1∣k)表示在k时刻预测的k+1时刻的的系统输入u,
u
(
k
+
i
∣
k
)
u(k+i|k)
u(k+i∣k)表示的含义类似于
u
(
k
+
1
∣
k
)
u(k+1|k)
u(k+1∣k),N表示预测区间。
同样地,令:
此时的代价函数(cost function)为
其中Q 、R、F 为权重系数矩阵,假设其中 Q、R 均为对称矩阵(简单一些)。代价函数包含系统的误差和控制输入,可以通过代价函数的大小来衡量系统的优劣。
根据系统的状态空间表达式,可以推导出:
将上式写成矩阵形式:


将(1.4)式展开,得:

以看到代价函数仍然需要
x
(
k
+
1
∣
k
)
,
x
(
k
+
2
∣
k
)
x(k+1|k),x(k+2|k)
x(k+1∣k),x(k+2∣k)等下一步未知的状态。而我们的目标是只用控制输入来表示代价函数。将式(1.7)代入(1.8)中,得
其中 
,可以看到式(1.9)经化简之后,得到最终的形式只包含初始状态 以及控制输入 。之后便是形如代价函数J的二次型函数的最优化问题。
Ps:既然初始状态那一项
x
k
T
G
x
k
x_k^TGx_k
xkTGxk是固定的,在计算最优化的时候可以不用计算吧。文章来源:https://www.toymoban.com/news/detail-413211.html
本文主要注重的是过程推导,最后我们得到了系统代价函数的简单形式,关于代码,DR_CAN老师的教程中有详细的讲解和实践,有兴趣的可以自行跳转学习。文章来源地址https://www.toymoban.com/news/detail-413211.html
到了这里,关于mpc模型预测控制原理详解的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!