一、实验环境
正点原子精英板一块
Jlink4线SWD下载线一根
精英板usb供电/下载线一根(负责给开发板供电)
SG90舵机一个(三线:其中红线接5V电压,棕线接GED,橙黄色为信号线接开发板PB5引脚,舵机所给为3pin杜邦线母头,可用单根杜邦线(一头子一头母)将舵机线飞开接到精英板上)。
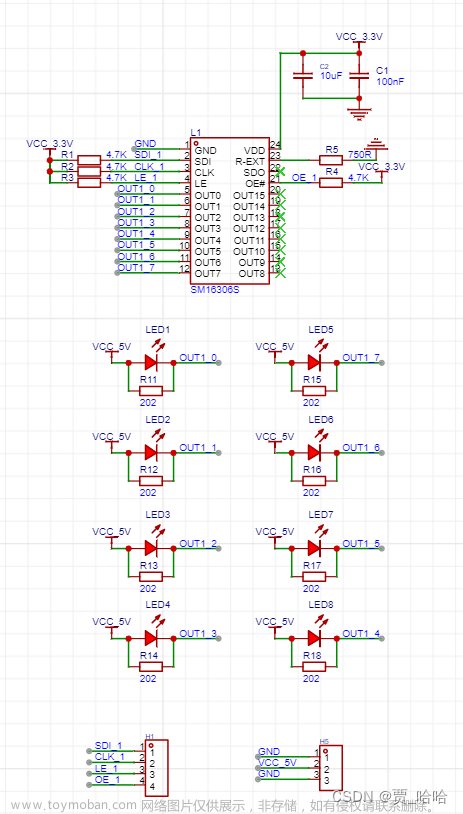
以下为接线图: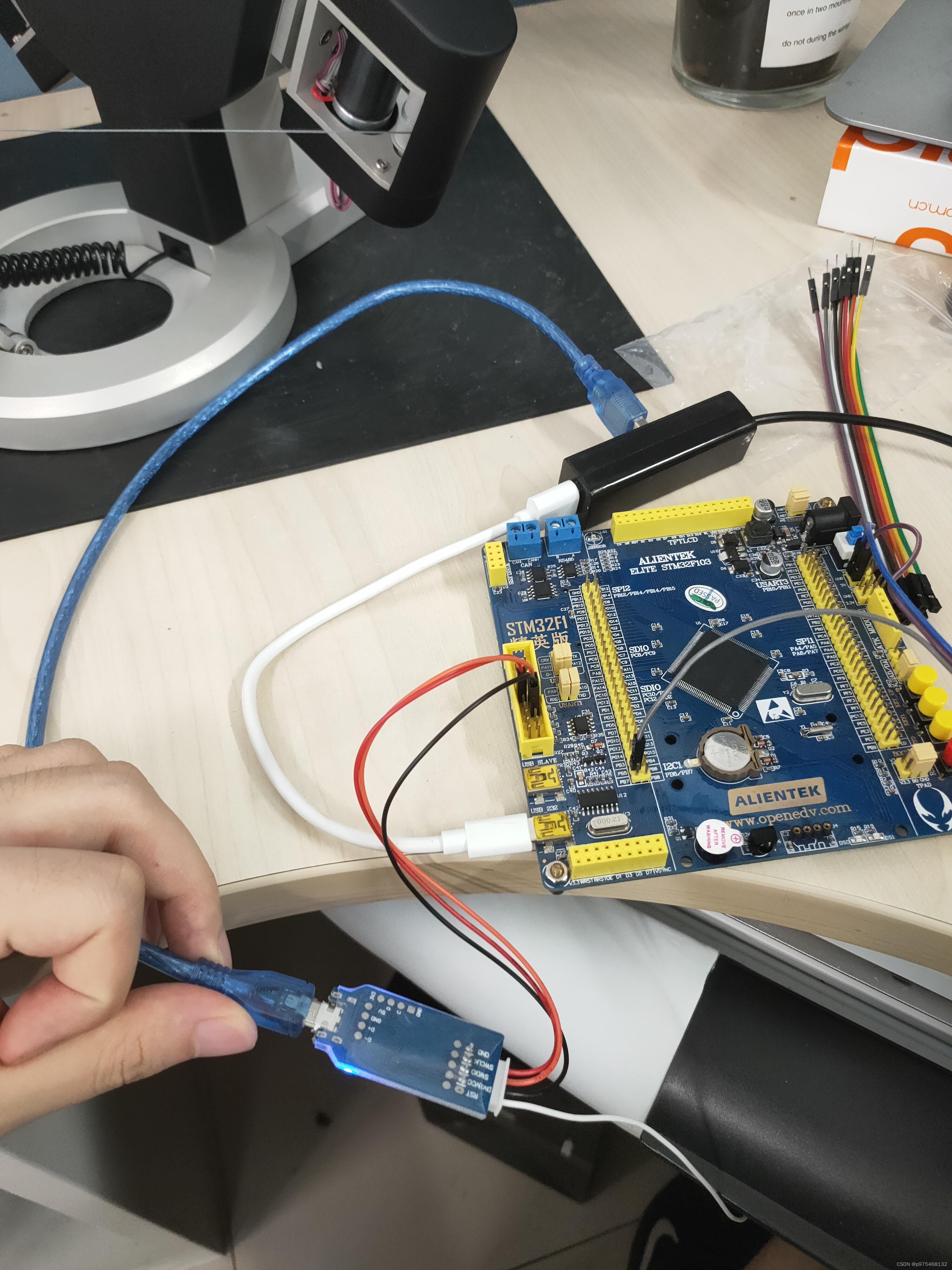
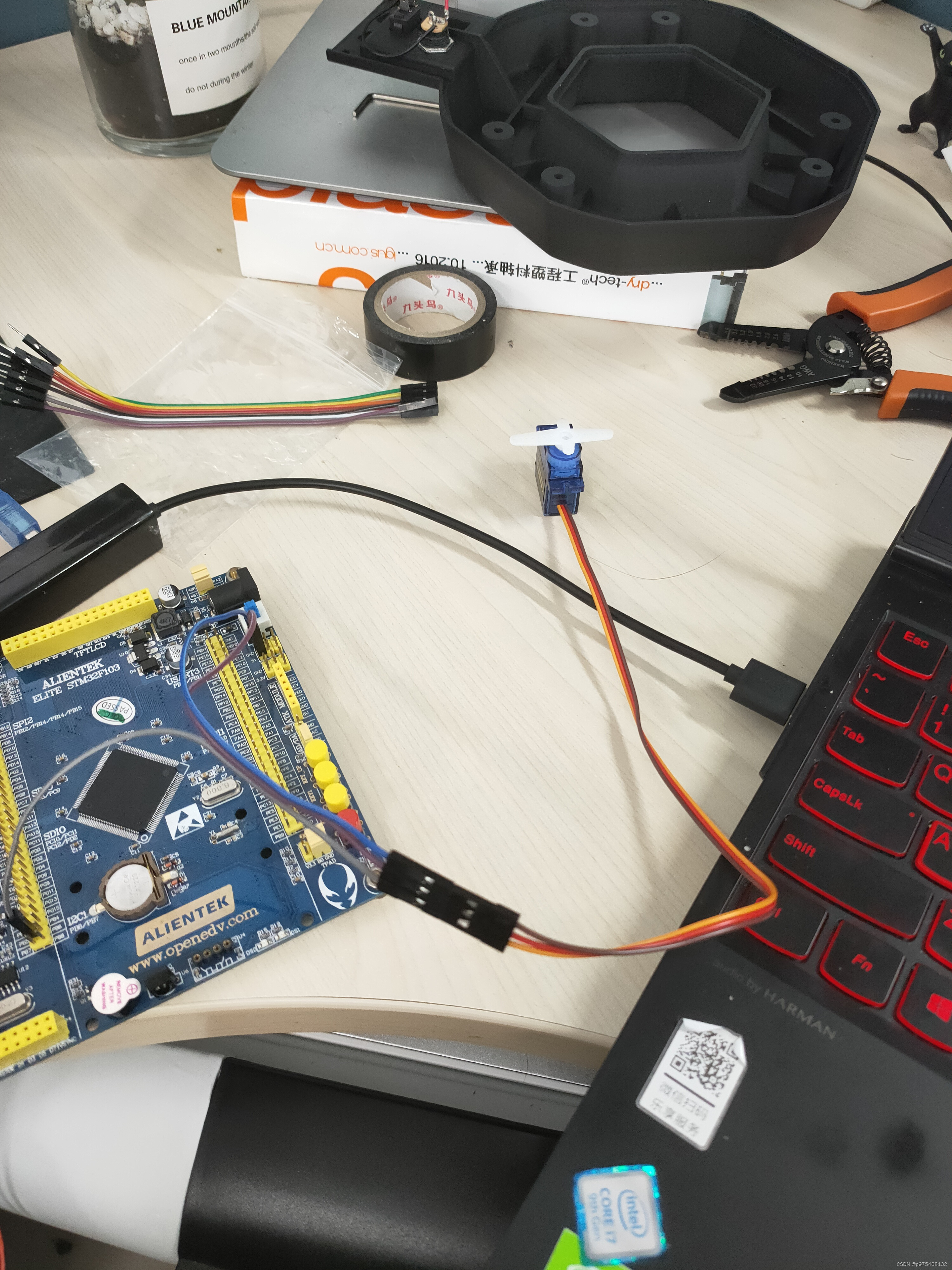
注意:精英板不支持Jlink供电,在连接Jlink时(4线SWD下载线),不要链接其VCC线,避免两端同时供电烧坏板子。
二、程序
以精英板配套资料里面的程序源码里的库函数版本的PWM输出实验为基础,然后对main函数进行简单更改,即可让舵机动起来!
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "usart.h"
#include "timer.h"
/************************************************
ALIENTEK精英STM32开发板实验9
PWM输出实验
技术支持:www.openedv.com
淘宝店铺:http://eboard.taobao.com
关注微信公众平台微信号:"正点原子",免费获取STM32资料。
广州市星翼电子科技有限公司
作者:正点原子 @ALIENTEK
************************************************/
int main(void)
{
u16 led0pwmval=0;
//u8 dir=1;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
LED_Init(); //LED端口初始化
TIM3_PWM_Init(1999,719); /*舵机的周期为20ms,取arr=1999,由周期计算公式:周期=(arr+1)*(psc+1)/CLK,此公式计算结果为s,此处CLK=72000000,由此可以计算出psc*/
while(1)
{
u8 i=0;
int angle=0;
for(i=0;i<=3;i++)
{
angle=60*i;
// led0pwmval = (int)(2000*(1-(( 2.5-(angle/90.0) )/20.0 ) ))-1;
led0pwmval = (int)(2000*(1-((0.5+angle/90.0)/20.0))) - 1;//计算公式见https://www.csdn.net/tags/MtTaEg0sNTQ5NjEzLWJsb2cO0O0O.html
TIM_SetCompare2(TIM3,led0pwmval);//库函数版本
//TIM3->CCR2=led0pwmval;//直接操作寄存器的方法
LED0=!LED0;
delay_ms(500);
}
}
}
程序也可参考:https://blog.csdn.net/weixin_46453984/article/details/109084815
三、原理及代码分析
https://www.csdn.net/tags/MtTaEg0sNTQ5NjEzLWJsb2cO0O0O.html
这篇博客讲解了舵机占空比的计算方法
下列代码沿用了标准例程的名字,里面代码有所更改。
timer.c代码如下:文章来源:https://www.toymoban.com/news/detail-413708.html
#include "timer.h"
#include "led.h"
#include "usart.h"
//V1.1 20120904
//1,增加TIM3_PWM_Init函数。
//2,增加LED0_PWM_VAL宏定义,控制TIM3_CH2脉宽
//通用定时器3中断初始化
//这里时钟选择为APB1的2倍,而APB1为36M
//arr:自动重装值。
//psc:时钟预分频数
//这里使用的是定时器3!
void TIM3_Int_Init(u16 arr,u16 psc)
{
//这里分别对TIM3并对其中断进行配置,因为TIM3搭载在APB1总线上,所以还需对APB1总线进行使能。
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 计数到5000为500ms
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 10Khz的计数频率
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIM3外设
}
//定时器3中断服务程序
void TIM3_IRQHandler(void) //TIM3中断
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:TIM 中断源
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清除TIMx的中断待处理位:TIM 中断源
LED1=!LED1;
}
}
//TIM3 PWM部分初始化
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM3_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5
//设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM3 Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIM3
}
下面是led.c的代码文章来源地址https://www.toymoban.com/news/detail-413708.html
#include "led.h"
//初始化PB5和PE5为输出口.并使能这两个口的时钟
/*用来对所用IO口进行配置的初始化函数,这里只是针对IO口,具体什么外设用这个IO口的输出信号,就看main函数设置了,
这里原本的实验例程是用PB5输出的PWM波来控制LED0的亮度的一个程序,因为在开发板的接线里面,LED0所接的是PB5引脚,
然后我们选用的PWM输出用的TIM3的TH2通道,他通过端口部分重映射功能,正好对应着PB5引脚,所以这里为了程序改动小,
直接沿用PB5来输出PWM控制舵机*/
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOE, ENABLE); //使能PB,PE端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //LED0-->PB.5 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB.5
GPIO_SetBits(GPIOB,GPIO_Pin_5); //PB.5 输出高
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //LED1-->PE.5 端口配置, 推挽输出
GPIO_Init(GPIOE, &GPIO_InitStructure); //推挽输出 ,IO口速度为50MHz
GPIO_SetBits(GPIOE,GPIO_Pin_5); //PE.5 输出高
}
到了这里,关于用正点原子STM32F103ZET6精英板控制舵机转动实验保姆教程的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!