🎊【蓝桥杯嵌入式】专题正在持续更新中,原理图解析✨,各模块分析✨以及历年真题讲解✨都已更新完毕,欢迎大家前往订阅本专题🎏
🎏【蓝桥杯嵌入式】蓝桥杯第十届省赛真题
🎏【蓝桥杯嵌入式】蓝桥杯第十二届省赛程序真题
🎏【蓝桥杯嵌入式】蓝桥杯第十三届省赛程序真题
🪔本系列专栏 - 蓝桥杯嵌入式_勾栏听曲_0的博客
🍻欢迎大家 🏹 点赞👍 评论📨 收藏⭐️
📌个人主页 - 勾栏听曲_0的博客📝
🔑希望本文能对你有所帮助,如有不足请指正,共同进步吧🏆
🎇书咄咄,且休休,一丘一壑也风流。📈
目录
题目
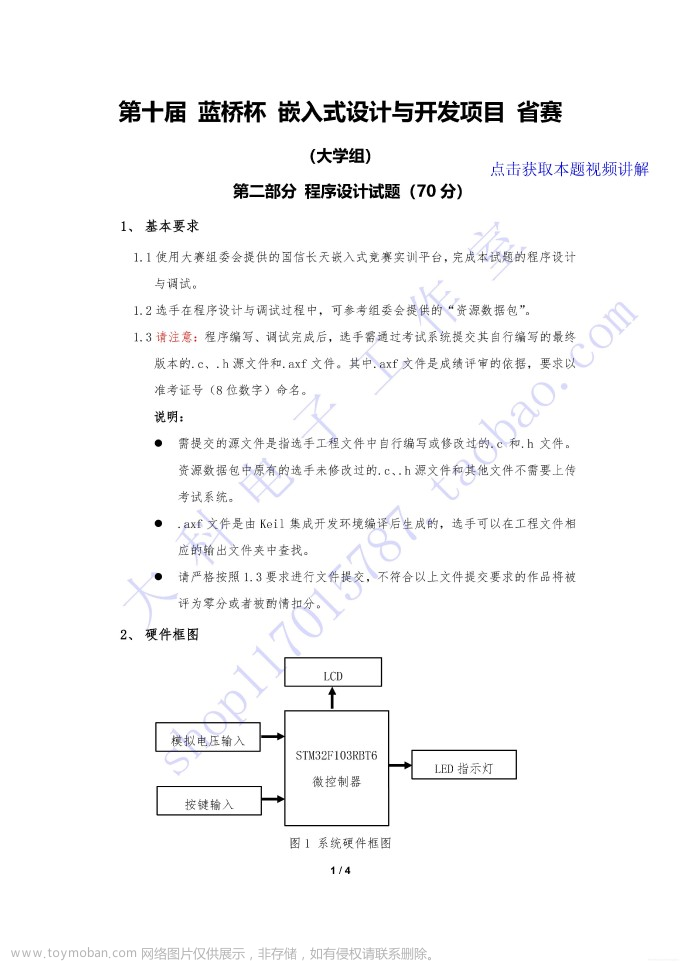
硬件框图
功能要求
初始状态说明
赛题分析
代码实现
题目
硬件框图

功能要求
🍓功能概述
1)通过PA1引脚输出频率、占空比可调节的脉冲信号。
2)通过PA7引脚完成脉冲捕获功能,测量输入到该引脚的信号频率。
3)通过微控制器的ADC 功能,检测电位器R37上输出的模拟电压信号。
4)依试题要求,通过 LCD、LED完成数据显示、报警指示等功能。
5)依试题要求,通过按键完成界面配置、参数设置等功能。
🍒性能要求
1)按键响应时间:≤0.1秒。
2)指示灯动作响应时间:≤0.2秒。
🍑PWM输出(PA1)
1)低频模式:输出信号频率为4KHz。
2)高频模式:输出信号频率为8KHz。
PA1输出信号占空比可以通过电位器R37进行调节,关系如下图所示

当模式切换时,在保证占空比不变的前提下,频率在5秒内均匀的升高或降低到目标频率,要求频率步进值小于200Hz。
🍍频率测量(PA7)
测量输入到PA7引脚的信号频率,并将其转换为速度值,速度值(v)与频率值(f)的对应关系:
其中f 单位为Hz,R和K作为参数,可以通过按键进行调整,n取小数点后2位有效数字。
🍋显示功能
1)数据界面
显示要素包括界面名称(DATA)、PWM输出模式(M、实时占空比(P)、实时速度(V)。

实时速度取小数点后1位有效数字。
输出模式以“H”表示高频模式、“L”表示低频模式,模式切换未完成前,屏幕显示的输出模式保持不变。
2)参数界面
显示要素包括界面名称(PARA)、参数R和K的当前值,R值和K值有效范围1-10,整数。

3)统计界面
显示要素包括:界面名称(RECD)、PWM输出模式切换次数(N)、高频和低频模式下的速度最大值。

MH:高频模式最大速度,ML:低频模式最大速度,显示保留小数点后1位有效数字。
4) LCD通用显示要求
显示背景色(BackColor):黑色
显示前景色(TextColor):白色
数据项与对应的数据之间使用“=”间隔开。
请严格按照图示3、4、5要求设计各个信息项的名称(区分字母大小写)和行列位置。
🍉按键功能
1)B1:定义为“界面”按键,按下Bl按键可以往复切换数据、参数和记录三个界面,切换模式如下图所示。

2)B2:定义为“选择”按键。
在数据界面下,用于切换选择低频或高频模式。按键按下后,5秒内不可再次触发切换功能。
在参数界面下,按下B2按键,切换选择R或K参数。每次从数据界面进入参数界面,默认当前可调整的参数为R参数;从参数界面退出时,新的R参数和K参数生效。
3)B3:定义为“加”按键。
在参数界面下,按下B3按键,当前可调整的参数加1,参数调整模式:
… 1 2 3 4 … 10 1 2 3 …
4)B4:定义为“减”按键。
在参数界面下,按下B4按键,当前可调整的参数减1,参数调整模式:
… 2 1 10 9 … 2 1 10 9 …
在数据界面下,长按B4按键超过2秒后松开(长按键),可以“锁定”占空比调整功能,此时输出信号占空比保持不变,不受R37电位器输出电压控制;处于“锁定”状态后,再次按下B4按键(短按键),实现“解锁”功能,恢复R37电位器对输出信号占空比的控制。
要求:
按键应进行有效的防抖处理,避免出现一次按键动作触发多次功能等情形。
按键动作不应影响数据采集过程和屏幕显示效果。
有效区分长、短按键功能,互不影响。
参数调整应考虑边界值,不出现无效参数。
当前界面下无功能的按键按下,不触发其它界面的功能。
🍇统计功能
1)低频模式、高频模式切换次数(N)。
2)高频、低频输出模式下的最大速度分开统计,保持时间不足2秒的速度值不纳入统计。
🥝LED指示灯功能
1) LD1:处于数据界面,指示灯LD1点亮,否则熄灭。
2) LD2:低频模式、高频模式切换期间,指示灯LD2以0.1秒为间隔切换亮、灭状态,模式切换完成后熄灭。
3) LD3:占空比调整处于“锁定”状态时,指示灯LD3点亮,否则熄灭。4)LD4-LD8指示灯始终处于熄灭状态。
初始状态说明
请严格按照下列要求设计作品上电后的初始状态:
1)参数R为1。
2)参数K为1。
3)切换次数N为0。
4)PWM输出模式为低频模式。
5)处于“解锁”状态,R37电位器可以控制信号占空比。
6)处于数据显示界面。
赛题分析
今年的赛题与最近几届又较大的不同,近几届都是老三样(LED,按键,LCD)加串口再加一个模块组成,而今年没考串口,换成了脉冲捕获,而PWM输出也与以往有些不同,并不是简单的改一下频率或占空比,而是要使用的输出模拟电压经过一些换算来修改占空比,同时还有一共坑下面我们再讲解这个坑。还有就是会有更多细节上的要求,包括按键的长按也是很久没考过的点了。
简单看一下硬件框图,得知考点主要有老三样(LED,按键,LCD),加脉冲捕获,模拟输入,PWM输出。
看一下功能概述,这里也许有些同学会有点混,因为平常可能是用PA7引脚做PWM输出。但这次不一样。PA1引脚才是做PWM输出的,而PA7引脚是用来完成脉冲捕获的。同时要检测R37的模拟信号。
我们看到PWM模块,PWM一共要求有两种输出模式,低频与高频,我们使用相关库函数更改PA1引脚的自动重装载值即可。第二点,PA1的PWM输出占空比是由R37电位器的电压决定的,看图得知是一共分段函数,R37的电压在1V一下时,占空比为10%,在3V以上时,占空比为85%,中间部分就是线性增长了。因为是线性的,所以解一个一元一次方程即可,解出来为:Y=37.5x-27.5(Y:占空比,单位%,X:R37通过ADC转换的电压。接下来大坑来啦,还要求我们在高频与低频模式切换时占空比要保持不变,并且,并且啊,重点来啦,并且频率的改变要在5秒内均匀变化,并且频率的每次变化不超过200Hz。
我们现在重点来讲讲这个是怎么坑的,要怎么解。首先解决频率变化时保持占空比不变,这一点不算复杂,因为频率是通过改变自动重装载值来改变的,我们只需要获取当前PA1的自动重装载值然后乘上占空比的百分比,再将这个值代入改变占空比的函数即可。而这个频率的均匀变化是怎么个均匀法呢。也许有些同学把这个均匀的概念直接加到用来修改频率的自动重装载值上,嘿嘿,如果这样,这个坑就被你踩实了。比如说,初始状态是低频,设置预分频系数为“100”,自动重装载值为“200”,这样的频率就为4000Hz了,要像频率升到8000Hz,那么自动重装载值就要降到“100”,但重点是均匀变化,这个均匀不是指200到100这个数值均匀变化,而是频率均匀变化。所以应该以频率的变化来改变自动重装载值。
现在坑也说完了,我们开始正式说这个问题怎么解决。要求每次变化不大于200Hz,我们就让它每次改变100Hz吧,假设频率现在为4000Hz,要变为8000Hz,就要改变自动重装载值40次,又要求5秒内完成变化,那就每0.1秒改变一次吧。第一次变化成4100Hz,那么自动重装载值就变成了80MHz/100(预分频系数)/4100取下整,所以每次改变自动重装载值,只需要先将存储频率的那个变量加100,然后代入上述的式子中就可以得到相应的自动重装载值啦。然后用相关函数改变自动重装载值就可以啦。(记住上面说的,频率变化的同时,占空比也不能改变哦)我们来看一下这部分的代码实现:
if(flag_k2 == 1) //按键2被按下的标志,这一部分只在按键被按下后执行一次
{
flag_5s = 1; //5s内按键2不能进行操作的定时器标志,开启这个定时器
flag_k2 = 0;
num ++;
if(plv_pa1<200) //plv_pa1:PA1的频率,小于200,即按键按下前为低频
{
flag_100 = 1; //按键按下前为低频的标志
}
else if(plv_pa1 > 100) //按键按下前为高频
{
flag_200 = 1; //按键按下前为高频的标志
}
}
if(flag_5s > 0 && flag_5s <= 400) //flag_5s:5秒的定时,每10毫秒加一,加到500重置为0
//这一部分是0.1秒中断执行一次的计时器里面,所以0到400一共执行40次,共耗时4秒。
{
if(deng == 0) //LED2循环闪烁的标志
{
TurnOn_LED(2);
deng++;
}
else
{
TurnOff_LED(2);
deng = 0;
}
if(flag_100 == 1) //如果是低频
{
plv_pa1 = 8000/(--f48); //这里将公式80Mhz/100(预分频系数)/频率,简化了一下
}
if(flag_200 == 1) //如果是高频
{
plv_pa1 = 8000/(++f48);
}
我们接着往下看,接下来的模块是脉冲捕获,脉冲捕获虽然好几年都没考过了,但是实现起来不算太难,也因为近几年都没考这个模块,本系列专题中也没有这个模块的讲解,如果有需要可在评论区留言,我再单独出一篇文章这脉冲捕获。然后这里也不是捕获后直接输出,还要经过一个公式的计算然后输出加速度,这里就不展开讲啦,会在下面的代码实现中具体讲怎么写的。
再往下就是LCD的显示功能了,每个字母位于几行几列,每个参数保留几位小数等细节注意一下就可以啦。需要特别注意的是数据界面中,“H”或“L”的变化要在频率完全改变完后再改变。
按键比以往多了一个长按,除此之外与往年形式都差不多了。
所谓统计功能就是记录一下某些数值,也不用EEPROM来存储。
LED模块就是常谈的闪烁与亮灭了。
至此,题目就分析完毕,哪些是难点重点想必大家心中有所定见了,接下来我们就开始搓代码吧。
代码实现
个人代码,仅供参考与讨论,解题思路最重要🧐
🌽中断模块
使用的是TIM3,10毫秒中断一次,里面实现了4个按键的单击,一个按键的长按,频率的均匀变化,占空比的变化等。
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM3)
{
key[0].key_sta=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);
key[1].key_sta=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);
key[2].key_sta=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);
key[3].key_sta=HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);
for(int i = 0;i < 4; i++ )
{
switch (key[i].judge_sta)
{
case 0:
{
if(key[i].key_sta==0)
{
key[i].judge_sta = 1; //第一次判断是否按下
key[i].key_time = 0;
}
}
break;
case 1:
{
if(key[i].key_sta==0) //进入下一次定时器扫描,按键还是按下状态,那么就确认为按下,以此来消抖
{
key[i].judge_sta = 2;
}
else
key[i].judge_sta = 0;
}
break;
case 2:
{
if(key[i].key_sta==1) //判断是否松手
{
if(key[i].key_time < 100)
{
key[i].key_flag = 1;
}
if(key[i].key_time > 100) //一次扫描10毫秒,100次1000毫秒,就是判断是否长按超过1000毫秒
//松手后,才会执行相应反应
{
key[i].long_flag = 1;
}
key[i].judge_sta = 0;
key[i].key_time = 0;
}
else
{
key[i].key_time++;
}
}
break;
}
}
if(a++ == 10) //0.1s
{
a = 0;
if(flag_k2 == 1) //按键2被按下的标志,这一部分只在按键被按下后执行一次
{
flag_5s = 1; //5s内按键2不能进行操作的定时器标志,开启这个定时器
flag_k2 = 0;
num ++;
if(plv_pa1<200) //plv_pa1:PA1的频率,小于200,即按键按下前问低频
{
flag_100 = 1; //按键按下前为低频的标志
}
else if(plv_pa1 > 100) //按键按下前为高频
{
flag_200 = 1; //按键按下前为高频的标志
}
}
if(flag_5s > 0 && flag_5s <= 400) //flag_5s:5秒的定时,每10毫秒加一,加到500重置为0
//这一部分是0.1秒中断执行一次的计时器里面,所以0到400一共执行40次,共耗时4秒。
{
if(deng == 0) //LED2循环闪烁的标志
{
TurnOn_LED(2);
deng++;
}
else
{
TurnOff_LED(2);
deng = 0;
}
if(flag_100 == 1) //如果是低频
{
plv_pa1 = 8000/(--f48); //这里将公式80Mhz/100(预分频系数)/频率,简化了一下
}
if(flag_200 == 1) //如果是高频
{
plv_pa1 = 8000/(++f48);
}
if(flag_5s > 402) //5秒定时计数超过402
{
if(flag_100 == 1)
{
plv_pa1 = 200;
flag_100 = 0;
}
if(flag_200 == 1)
{
plv_pa1 = 100;
flag_200 = 0;
}
}
__HAL_TIM_SetAutoreload(&htim2,plv_pa1);
}
pa7_duty = getADC(&hadc2);
if(pa7_duty <= 1 && flag_s == 0)
{
__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,plv_pa1*0.1);
pa1 = 10;
}
else if(pa7_duty >= 3 && flag_s == 0)
{
__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,plv_pa1*0.85);
pa1 = 85;
}
else if(flag_s == 0)
{
__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,plv_pa1*(0.375*pa7_duty-0.275));
pa1 = 37.5*pa7_duty-27.5;
}
}
if(flag_5s >0)
{
flag_5s+=1;
if(flag_5s > 500)
{
flag_5s = 0;
TurnOff_LED(2);
}
}
}
}🍄脉冲捕获
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)//捕获计数器 频率测量
{
if(htim->Channel==HAL_TIM_ACTIVE_CHANNEL_1)//中断消息来源 选择直接输入的通道
{
tim_val1= HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_1);//获取计数器1的值
__HAL_TIM_SetCounter(htim,0);//计数器归零
frq = 1000000/tim_val1; //frq=时钟(80m)/prescaler(80)/tim_val1
HAL_TIM_IC_Start_IT(htim, TIM_CHANNEL_1);
}
}🍅按键模块
void key_proc()
{
if(key[0].key_flag == 1)
{
view++;
if(view==3) view=0;
if(view == 0)
{
TurnOn_LED(1);
flag_r = 0;
}
else
{
TurnOff_LED(1);
}
LCD_Clear(Black);
key[0].key_flag = 0;
}
if(key[1].key_flag == 1)
{
if(view == 0 && flag_k2 == 0)
{
flag_k2 = 1;
}
else if(view == 1)
{
flag_r++;
if(flag_r == 2)
{
flag_r = 0;
}
}
key[1].key_flag = 0;
}
if(key[2].key_flag == 1)
{
if(view == 1)
{
if(flag_r == 0)
{
R++;
if(R == 11)
R = 1;
}
else
{
K++;
if(K == 11)
K = 1;
}
}
key[2].key_flag = 0;
}
if(key[3].key_flag == 1)
{
if(view == 1)
{
if(flag_r == 0)
{
R--;
if(R == 0)
R = 10;
}
else
{
K--;
if(K == 0)
K = 10;
}
}
if(view == 0)
{
flag_s = 0;
TurnOff_LED(3);
}
key[3].key_flag = 0;
}
if(key[3].long_flag == 1)
{
if(view ==0)
{
flag_s = 1;
TurnOn_LED(3);
}
key[3].long_flag = 0;
}
}🥑LCD模块文章来源:https://www.toymoban.com/news/detail-413827.html
void disp_proc()
{
Vs = frq*2*3.14*R/(100*K);
if(plv_pa1 >= 200)
{
if(Vs > V_max)
{
V_max = Vs;
}
}
else if(plv_pa1 < 105)
{
if(Vs > V_min)
{
V_min = Vs;
}
}
if(view==0)
{
char text[30];
sprintf(text," DATA ");
LCD_DisplayStringLine(Line1, (uint8_t *)text);
if(plv_pa1 == 200) //频率完全改变完后改变M的值
{
sprintf(text," M=L ");
LCD_DisplayStringLine(Line3, (uint8_t *)text);
}
else if(plv_pa1 == 100)
{
sprintf(text," M=H ");
LCD_DisplayStringLine(Line3, (uint8_t *)text);
}
sprintf(text," p=%d%% ",pa1);
LCD_DisplayStringLine(Line4, (uint8_t *)text);
sprintf(text," V=%.1f ",Vs);
LCD_DisplayStringLine(Line5, (uint8_t *)text);
}
else if(view==1)
{
//disp_clear();
char text[30];
sprintf(text," PARA ");
LCD_DisplayStringLine(Line1, (uint8_t *)text);
sprintf(text," R=%d ",R);
LCD_DisplayStringLine(Line3, (uint8_t *)text);
sprintf(text," k=%d ",K);
LCD_DisplayStringLine(Line4, (uint8_t *)text);
}
else if(view==2)
{
//disp_clear();
char text[30];
sprintf(text," RECD ");
LCD_DisplayStringLine(Line1, (uint8_t *)text);
sprintf(text," n=%d ",num);
LCD_DisplayStringLine(Line3, (uint8_t *)text);
sprintf(text," MH=%.1f ",V_max);
LCD_DisplayStringLine(Line4, (uint8_t *)text);
sprintf(text," ML=%.1f ",V_min);
LCD_DisplayStringLine(Line5, (uint8_t *)text);
}
}希望本篇文章对你有所收获,如有疑问或其他问题可在评论区留言📝文章来源地址https://www.toymoban.com/news/detail-413827.html
到了这里,关于【蓝桥杯嵌入式】蓝桥杯嵌入式第十四届省赛程序真题,真题分析与代码讲解的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
![【蓝桥杯嵌入式】第十四届蓝桥杯嵌入式[模拟赛2]客观题及详细题解](https://imgs.yssmx.com/Uploads/2024/01/409776-1.png)
![【蓝桥杯嵌入式】第十四届蓝桥杯嵌入式[模拟赛2]程序设计试题及详细题解](https://imgs.yssmx.com/Uploads/2024/01/412133-1.png)
![【蓝桥杯嵌入式】第十四届蓝桥杯嵌入式[模拟赛1]程序设计试题及详细题解](https://imgs.yssmx.com/Uploads/2024/01/412432-1.png)