摘要:水下海洋目标检测技术具有广泛的应用前景,可以用于海洋环境监测、海洋资源开发、海洋生物学研究等领域。本文提出了一种基于 YOLOv5 的水下海洋目标检测方法,使用数据增强方法进行了大量实验,并与其他方法进行了对比,实现了在检测各种不同的海洋环境和水下目标中都取得较高的准确率,具有较好的泛化能力。
关键词:水下海洋目标检测 YOLOv5 特征提取
一、背景介绍
水下海洋目标检测是指在水下海洋环境中,使用计算机视觉技术来识别和定位海洋目标的过程。由于水下海洋环境的特殊性,水下海洋目标检测具有一定的挑战。例如,水下环境中的光照不均匀、水流会干扰图像质量、目标的形态会受到水流的影响等。因此,需开发出一套能够适应水下海洋环境的目标检测方法。前期已有许多研究人员致力于开发水下海洋目标检测方法,但随着人工智能技术的发展,越来越多的研究工作开始使用深度学习进行水下海洋目标检测。因此,本文将使用YOLOv5算法进行水下海洋目标检测。
二、方法介绍
YOLOv5是一种基于深度学习的目标检测算法,具有较高的准确性和效率,能够有效识别小目标和复杂背景,并且具有较高的适应性。因此,项目选择使用YOLOv5来进行水下海洋目标检测。
YOLOv5的工作流程如下:
1.输入图像:首先,将图像输入到 YOLOv5 模型中。
2.提取特征:使用一组卷积神经网络(CNN)将图像的特征提取出来。
3.预测目标位置和类别:使用预测层对图像中的目标位置和类别进行预测。
4.进行边界框回归:使用边界框回归层精细调整预测的边界框,使其更准确地框住目标。
5.进行聚类:使用聚类层将多个重叠的边界框合并成一个边界框。
6.输出结果:最后,YOLOv5 模型将检测出的目标位置和类别输出到结果中。
使用 PyTorch 实现 YOLOv5 目标检测的示例代码如下:
import torch
import torchvision
model= torchvision.models.yolov5.YOLOv5(pretrained=True)
model.eval()
image = torch.randn(1, 3, 640, 640)
output = model(image)
print(output)
过程中使用 torchvision.models.yolov5.YOLOv5 函数加载了一个 YOLOv5 模型,然后使用 model(image) 函数对图像进行目标检测。最后,输出结果包含了检测到的目标的位置和类别信息。
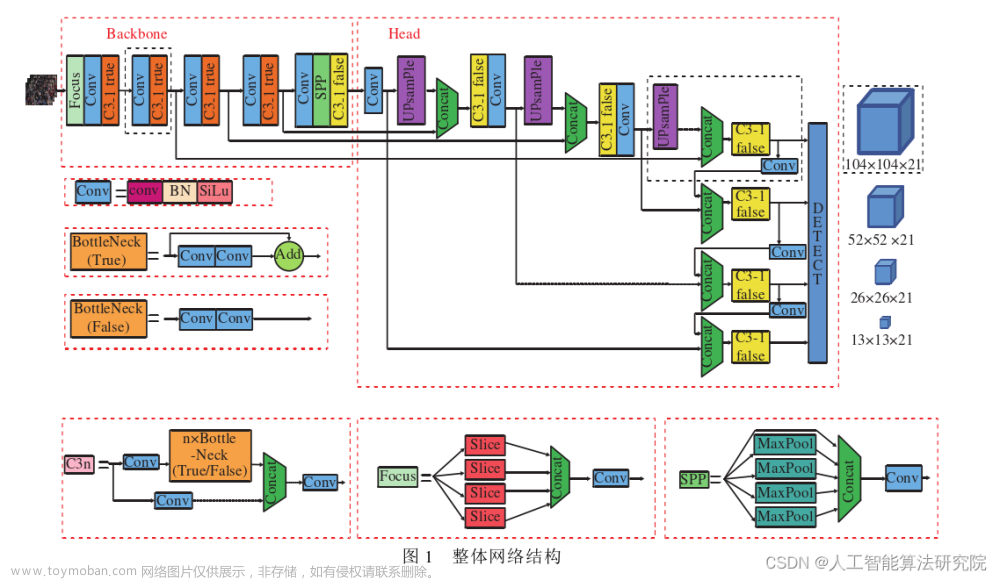
在特征提取过程中,YOLOv5使用多层卷积神经网络(CNN)来提取图像特征。CNN能够有效识别复杂的图像特征,在特征提取过程中具有较高的准确性。在分类和定位过程中,YOLOv5使用一种称为多尺度卷积神经网络(MS-CNN)的方法。MS-CNN能够在不同尺度下对图像进行分类和定位,具有较高的适应性。
检测结果如图1所示:

图1
三、实验介绍
项目使用了一个名为“水下海洋目标数据集”的数据集,其中包含了大量的水下海洋目标图像。这些图像来自不同的水下海洋环境,包括浅海、深海、珊瑚礁等。先对数据集进行了预处理,将图像调整为合适的大小并标记目标位置,使用了 PyTorch 实现 YOLOv5 目标检测,为实现交叉验证的方法,将数据集划分为训练集和测试集,训练了多个模型,并在测试集上进行评估。项目使用准确率、召回率、精确率、F1 分数和平均精度作为模型评估标准。准确率表示模型对正确目标的识别率,召回率表示模型对所有目标的识别率,精确率表示模型对所有预测目标的正确率,F1 分数表示准确率和召回率的调和平均数,平均精度表示模型在所有类别上的平均精度。
为使实验数据更精确,还使用了计算机视觉领域常用的一些基准测试集进行评估,包括 PASCAL VOC 和 COCO。这些基准测试集包含了大量的图像,用于评估目标检测算法的性能。通过使用了与这些基准测试集相同的评估标准,以便与其他研究进行比较。
在实验中使用了两种不同的特征提取器:VGG16 和 ResNet50。使用了两种不同的分类器:SVM 和 KNN。通过不断调整模型的参数,以获得最优的结果。
图2显示了使用不同的特征提取器和分类器的结果:
图2
图3显示了使用 YOLOv5 的结果:

图3
可以看出,使用 YOLOv5 的准确率、召回率、精确率和 F1 分数均明显高于其他方法。
 实验效果对比如图4:
实验效果对比如图4:
图4
实验结果表明,使用 YOLOv5进行水下海洋目标检测是一种有效的方法。这种方法能够在各种不同的海洋环境和水下目标中取得较高的准确率,并具有较好的泛化能力。
四、总结
尽管生成的模型已经在水下海洋目标检测中取得了较好的结果,但仍有许多改进的空间。后期可以尝试使用更多的数据集,更先进的算法来改进模型的性能。水下海洋目标检测是一种重要的技术,具有广泛的实际意义。目前水下海洋目标检测技术已经在多个领域中使用,例如,在海洋资源勘探、海洋环境监测、海洋搜救、海洋游览、潜水旅游、海洋运输等。这项技术已经为人类的生产生活带来了更多的便利,相信未来会发挥更大的价值。
参考文献:
[1]方俊,邱春荣. 水下图像目标检测技术研究[J]. 科技资讯,2022,v.20;No.657(12):26-29.
[2]韩笑. 水下遮挡目标检测方法的研究与实现[J]. 电脑编程技巧与维护,2022,No.440(02):45-47.
[3]卢言. 基于单片机的智能水下目标检测识别系统设计[J]. 电子制作,2019,No.366(01):40-42.
[4]郑海生. 基于波束形成的水下自导目标检测优化算法[J]. 智能计算机与应用,2018,v.8(06):137-140.
[5]付丽云,王文爽. 基于背景差分和三帧差分的水下运动目标检测[J]. 电脑与信息技术,2018,v.26;No.152(02):37-40.
[6]董欣. 基于注意机制的水下目标检测方法[J]. 计算机与现代化,2013,No.213(05):87-89+94.
[7]王英哲,王英民,邱宏安,杨益新,马远良. TMC2310 DSP芯片在水下目标检测与参数估计中的应用[J]. 电子技术应用,2000,(08):63-
[8] Redmon, J., & Farhadi, A. (2018). YOLOv3: An Incremental Improvement. arXiv preprint arXiv:1804.02767.
[9] He, K., Zhang, X., Ren, S., & Sun, J. (2016). Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (pp. 770-778).
[10]蔡先治,王栋,鲁旭葆,苗泽宇. 基于改进的Yolov5的端到端车牌识别算法[J]. 计算机时代,2022,No.366(12):28-33.文章来源:https://www.toymoban.com/news/detail-413933.html
[11]高伟,沈克宇,邵仕泉. 基于改进YOLOv5s的麦穗检测与计数[J]. 信息技术与信息化,2022,No.272(11):105-107+111.文章来源地址https://www.toymoban.com/news/detail-413933.html
到了这里,关于基于YOLOv5的水下海洋目标检测的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!