毕设需要,复现一下PointNet++的对象分类、零件分割和场景分割,找点灵感和思路,做个踩坑记录。
下载代码
https://github.com/yanx27/Pointnet_Pointnet2_pytorch
我的运行环境是pytorch1.7+cuda11.0。
训练
PointNet++代码能实现3D对象分类、对象零件分割和语义场景分割。
对象分类
下载数据集ModelNet40,并存储在文件夹data/modelnet40_normal_resampled/。
## e.g., pointnet2_ssg without normal features
python train_classification.py --model pointnet2_cls_ssg --log_dir pointnet2_cls_ssg
python test_classification.py --log_dir pointnet2_cls_ssg
## e.g., pointnet2_ssg with normal features
python train_classification.py --model pointnet2_cls_ssg --use_normals --log_dir pointnet2_cls_ssg_normal
python test_classification.py --use_normals --log_dir pointnet2_cls_ssg_normal
## e.g., pointnet2_ssg with uniform sampling
python train_classification.py --model pointnet2_cls_ssg --use_uniform_sample --log_dir pointnet2_cls_ssg_fps
python test_classification.py --use_uniform_sample --log_dir pointnet2_cls_ssg_fps
- 主文件夹下运行代码
python train_classification.py --model pointnet2_cls_ssg --log_dir pointnet2_cls_ssg时可能会报错:ImportError: cannot import name 'PointNetSetAbstraction'
原因是pointnet2_cls_ssg.py文件import时的工作目录时models文件夹,但是实际运行的工作目录时models的上级目录,因此需要在pointnet2_cls_ssg.py里把from pointnet2_utils import PointNetSetAbstraction改成from models.pointnet2_utils import PointNetSetAbstraction。
参考README.md文件,分类不是我的主攻点,这里就略过了。
零件分割
零件分割是将一个物体的各个零件分割出来,比如把椅子的椅子腿分出来。
下载数据集ShapeNet,并存储在文件夹data/shapenetcore_partanno_segmentation_benchmark_v0_normal/。
运行也很简单:
## e.g., pointnet2_msg
python train_partseg.py --model pointnet2_part_seg_msg --normal --log_dir pointnet2_part_seg_msg
python test_partseg.py --normal --log_dir pointnet2_part_seg_msg
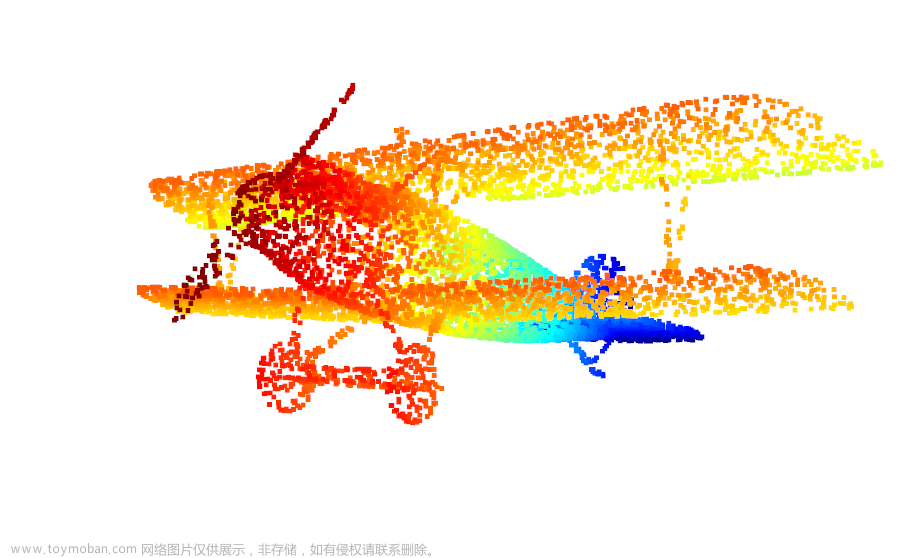
shapenet数据集txt文件格式:前三个点是xyz,点云的位置坐标,后三个点是点云的法向信息,最后一个点是这个点所属的小类别,即1表示所属50个小类别中的第一个。
写个代码用open3d可视化shapenet数据集的txt文件(随机配色):
import open3d as o3d
import numpy as np
'''
BASE_DIR = os.path.dirname(os.path.abspath(__file__))
ROOT_DIR = os.path.dirname(BASE_DIR)
sys.path.append(BASE_DIR)
sys.path.append(os.path.join(ROOT_DIR, 'data_utils'))
'''
txt_path = '/home/lin/CV_AI_learning/Pointnet_Pointnet2_pytorch-master/data/shapenetcore_partanno_segmentation_benchmark_v0_normal/02691156/1b3c6b2fbcf834cf62b600da24e0965.txt'
# 通过numpy读取txt点云
pcd = np.genfromtxt(txt_path, delimiter=" ")
pcd_vector = o3d.geometry.PointCloud()
# 加载点坐标
# txt点云前三个数值一般对应x、y、z坐标,可以通过open3d.geometry.PointCloud().points加载
# 如果有法线或颜色,那么可以分别通过open3d.geometry.PointCloud().normals或open3d.geometry.PointCloud().colors加载
pcd_vector.points = o3d.utility.Vector3dVector(pcd[:, :3])
pcd_vector.colors = o3d.utility.Vector3dVector(pcd[:, 3:6])
o3d.visualization.draw_geometries([pcd_vector])
GPU内存不够减小一下batch_size。
我这里训练了一下,接着代码的best_model.pth继续训练150轮,RTX3080单显卡训练一轮得六七分钟,150轮花了半天多的时间。
网上的代码基本test一下分割的一些参数就结束了,没有做可视化,参考这篇blog做了一下结果的可视化:PointNet++分割预测结果可视化。这篇blog首先用网络将输入图像的预测结果存为txt文件,然后用Matplotlib做可视化,过程有点复杂了,用open3d做可视化比较简洁一点,代码如下:
import tqdm
import matplotlib
import torch
import os
import warnings
import numpy as np
import open3d as o3d
from torch.utils.data import Dataset
import pybullet as p
from models.pointnet2_part_seg_msg import get_model as pointnet2
import time
warnings.filterwarnings('ignore')
matplotlib.use("Agg")
def pc_normalize(pc):
centroid = np.mean(pc, axis=0)
pc = pc - centroid
m = np.max(np.sqrt(np.sum(pc ** 2, axis=1)))
pc = pc / m
return pc,centroid,m
def generate_pointcloud(color_image, depth_image,width=1280,height=720,fov=50,near=0.01,far=5):
rgbd_image = o3d.geometry.RGBDImage.create_from_color_and_depth(color_image, depth_image,convert_rgb_to_intensity=False)
intrinsic = o3d.camera.PinholeCameraIntrinsic(o3d.camera.PinholeCameraIntrinsicParameters.Kinect2DepthCameraDefault )
aspect = width / height
projection_matrix = p.computeProjectionMatrixFOV(fov, aspect, near, far)
intrinsic.set_intrinsics(width=width, height=height, fx=projection_matrix[0]*width/2, fy=projection_matrix[5]*height/2, cx=width/2, cy=height/2)
point_cloud = o3d.geometry.PointCloud.create_from_rgbd_image(rgbd_image, intrinsic)
point_cloud.estimate_normals( search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.01, max_nn=30))
return point_cloud
class PartNormalDataset(Dataset):
def __init__(self, point_cloud, npoints=2500, normal_channel=False):
self.npoints = npoints # 采样点数
self.cat = {}
self.normal_channel = normal_channel # 是否使用法向信息
position_data = np.asarray(point_cloud.points)
normal_data = np.asarray(point_cloud.normals)
self.raw_pcd = np.hstack([position_data,normal_data]).astype(np.float32)
self.cat = {'board':'12345678'}
# 输出的是元组,('Airplane',123.txt)
self.classes = {'board': 0}
data = self.raw_pcd
if not self.normal_channel: # 判断是否使用法向信息
self.point_set = data[:, 0:3]
else:
self.point_set = data[:, 0:6]
self.point_set[:, 0:3],self.centroid,self.m = pc_normalize(self.point_set[:, 0:3]) # 做一个归一化
choice = np.random.choice(self.point_set.shape[0], self.npoints, replace=True) # 对一个类别中的数据进行随机采样 返回索引,允许重复采样
# resample
self.point_set = self.point_set[choice, :] # 根据索引采样
def __getitem__(self, index):
cat = list(self.cat.keys())[0]
cls = self.classes[cat] # 将类名转换为索引
cls = np.array([cls]).astype(np.int32)
return self.point_set, cls, self.centroid, self.m # pointset是点云数据,cls十六个大类别,seg是一个数据中,不同点对应的小类别
def __len__(self):
return 1
class Generate_txt_and_3d_img:
def __init__(self,num_classes,testDataLoader,model,visualize = False):
self.testDataLoader = testDataLoader
self.num_classes = num_classes
self.heat_map = False # 控制是否输出heatmap
self.visualize = visualize # 是否open3d可视化
self.model = model
self.generate_predict()
self.o3d_draw_3d_img()
def __getitem__(self, index):
return self.predict_pcd_colored
def generate_predict(self):
for _, (points, label,centroid,m) in tqdm.tqdm(enumerate(self.testDataLoader),
total=len(self.testDataLoader),smoothing=0.9):
#点云数据、整个图像的标签、每个点的标签、 没有归一化的点云数据(带标签)torch.Size([1, 7, 2048])
points = points.transpose(2, 1)
#print('1',target.shape) # 1 torch.Size([1, 2048])
xyz_feature_point = points[:, :6, :]
model = self.model
seg_pred, _ = model(points, self.to_categorical(label, 1))
seg_pred = seg_pred.cpu().data.numpy()
if self.heat_map:
out = np.asarray(np.sum(seg_pred,axis=2))
seg_pred = ((out - np.min(out) / (np.max(out) - np.min(out))))
else:
seg_pred = np.argmax(seg_pred, axis=-1) # 获得网络的预测结果 b n c
seg_pred = np.concatenate([np.asarray(xyz_feature_point), seg_pred[:, None, :]],
axis=1).transpose((0, 2, 1)).squeeze(0)
self.predict_pcd = seg_pred
self.centroid = centroid
self.m = m
def o3d_draw_3d_img(self):
pcd = self.predict_pcd
pcd_vector = o3d.geometry.PointCloud()
# 加载点坐标
pcd_vector.points = o3d.utility.Vector3dVector(self.m * pcd[:, :3] + self.centroid)
# colors = np.random.randint(255, size=(2,3))/255
colors = np.array([[0.8, 0.8, 0.8],[1,0,0]])
pcd_vector.colors = o3d.utility.Vector3dVector(colors[list(map(int,pcd[:, 6])),:])
if self.visualize:
coord_mesh = o3d.geometry.TriangleMesh.create_coordinate_frame(size = 0.1, origin = [0,0,0])
o3d.visualization.draw_geometries([pcd_vector,coord_mesh])
self.predict_pcd_colored = pcd_vector
def to_categorical(self,y, num_classes):
""" 1-hot encodes a tensor """
new_y = torch.eye(num_classes)[y.cpu().data.numpy(),]
if (y.is_cuda):
return new_y.cuda()
return new_y
def load_models(model_dict={'PonintNet': [pointnet2(num_classes=2,normal_channel=True).eval(),r'./log/part_seg/pointnet2_part_seg_msg/checkpoints']}):
model = list(model_dict.values())[0][0]
checkpoints_dir = list(model_dict.values())[0][1]
weight_dict = torch.load(os.path.join(checkpoints_dir,'best_model.pth'))
model.load_state_dict(weight_dict['model_state_dict'])
return model
class Open3dVisualizer():
def __init__(self):
self.point_cloud = o3d.geometry.PointCloud()
self.o3d_started = False
self.vis = o3d.visualization.VisualizerWithKeyCallback()
self.vis.create_window()
def __call__(self, points, colors):
self.update(points, colors)
return False
def update(self, points, colors):
coord_mesh = o3d.geometry.TriangleMesh.create_coordinate_frame(size = 0.15, origin = [0,0,0])
self.point_cloud.points = points
self.point_cloud.colors = colors
# self.point_cloud.transform([[1,0,0,0],[0,-1,0,0],[0,0,-1,0],[0,0,0,1]])
# self.vis.clear_geometries()
# Add geometries if it is the first time
if not self.o3d_started:
self.vis.add_geometry(self.point_cloud)
self.vis.add_geometry(coord_mesh)
self.o3d_started = True
else:
self.vis.update_geometry(self.point_cloud)
self.vis.update_geometry(coord_mesh)
self.vis.poll_events()
self.vis.update_renderer()
if __name__ =='__main__':
num_classes = 2 # 填写数据集的类别数 如果是s3dis这里就填13 shapenet这里就填50
color_image = o3d.io.read_image('image/rgb1.jpg')
depth_image = o3d.io.read_image('image/depth1.png')
point_cloud = generate_pointcloud(color_image=color_image, depth_image=depth_image)
TEST_DATASET = PartNormalDataset(point_cloud,npoints=30000, normal_channel=True)
testDataLoader = torch.utils.data.DataLoader(TEST_DATASET, batch_size=1, shuffle=False, num_workers=0,drop_last=True)
predict_pcd = Generate_txt_and_3d_img(num_classes,testDataLoader,load_models(),visualize = True)
把之前的代码改成了针对单个点云预测的可视化,点云由GRB图像和深度图像生成,如果想直接输入点云自己稍微改下代码就可以了,目前仅针对shapenet数据集格式的数据。这里要注意如果训练的时候选择了--normal,那么normal_channel要改成True。
看下训练效果,用modelnet40里的一个chair文件进行预测。



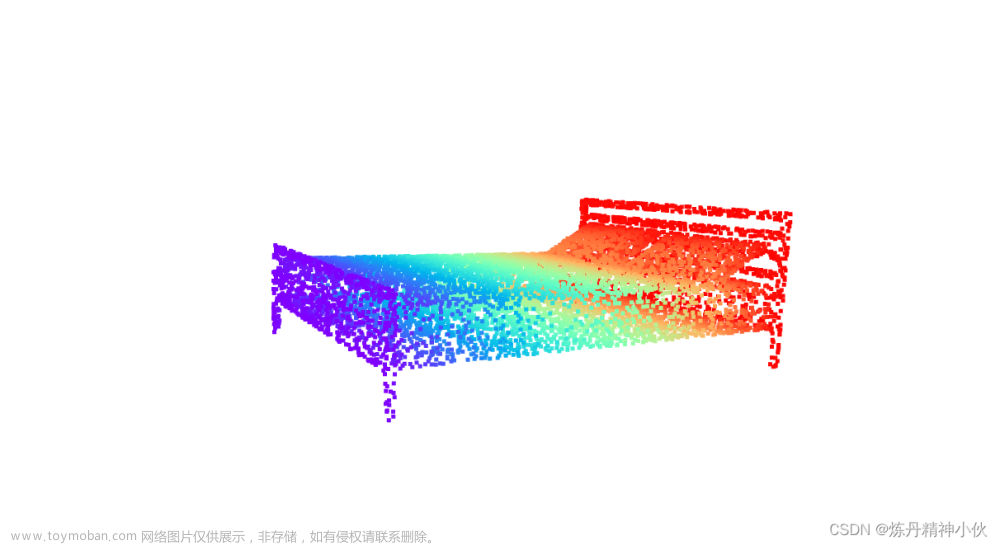
可以看到这个椅子大致是分成了四块,但是椅子靠背、腿分割地挺好的,就是扶手有一部分分割到了坐垫那里了,毕竟训练时间不长。modelnet40数据集只是用来分类,并没有分割的标注,所以这里可视化了一下shapenet里标注好的椅子点云,看看椅子各个部位的分割(并非上面的椅子)。


这里就比较显而易见地看出椅子分为靠背、扶手、坐垫、腿四个部分。
初步观察到效果以后可以开始尝试自己制作数据集进行训练了,可以参考我写的这篇文章:《CloudCompare制作ShapeNet格式点云数据集》。
场景分割
零件分割网络可以很容易地扩展到语义场景分割,点标记成为语义对象类而不是目标零件标记。
在 Stanford 3D语义分析数据集上进行实验。该数据集包含来自Matterport扫描仪的6个区域的3D扫描,包括271个房间。扫描中的每个点都用13个类别(椅子、桌子、地板、墙壁等加上杂物)中的一个语义标签进行注释。
先把文件下载过来: S3DIS ,存到文件夹data/s3dis/Stanford3dDataset_v1.2_Aligned_Version/.
处理数据,数据会存到data/stanford_indoor3d/。
cd data_utils
python collect_indoor3d_data.py
运行:
## Check model in ./models
## e.g., pointnet2_ssg
python train_semseg.py --model pointnet2_sem_seg --test_area 5 --log_dir pointnet2_sem_seg
python test_semseg.py --log_dir pointnet2_sem_seg --test_area 5 --visual
上面的操作走完以后会在log/sem_seg/pointnet2_sem_seg/visual/生成预测结果的obj文件,可以用open3d进行可视化,就是不能用o3d.io.read_triangle_mesh函数来可视化obj文件,因为这里生成的obj文件还带了颜色信息用来表示语义信息,所以得读取成列表数据然后定义成o3d.geometry.PointCloud()变量显示,代码如下:
import copy
import numpy as np
import open3d as o3d
import os
objFilePath = 'log/sem_seg/pointnet2_sem_seg/visual/Area_5_office_8_gt.obj'
with open(objFilePath) as file:
points = []
while 1:
line = file.readline()
if not line:
break
strs = line.split(" ")
if strs[0] == "v":
points.append(np.array(strs[1:7],dtype=float))
if strs[0] == "vt":
break
# points原本为列表,需要转变为矩阵,方便处理
pcd = np.array(points)
pcd_vector = o3d.geometry.PointCloud()
pcd_vector.points = o3d.utility.Vector3dVector(pcd[:, :3])
pcd_vector.colors = o3d.utility.Vector3dVector(pcd[:,3:6])
o3d.visualization.draw_geometries([pcd_vector])
康康Area_5里office_8的效果:
原图:



ground truth:
predict:


OK,大致算是把这个PointNet++复现完了,着重做了下点云分割,给毕设做准备。总的来讲,训练和预测的过程并不难,为了康康效果,可视化的部分倒是花了挺长时间。零件分割和场景分割本质上讲其实是一回事,就是在代码里面这两个分割用了不同的模型来训练。之后打算自己制作数据集来训练一下,先拿零件分割的模型来做,毕竟场景分割做成S3DIS形式的数据集有点麻烦。总之跟着这篇blog走肯定是能跑通PointNet++的。文章来源:https://www.toymoban.com/news/detail-413960.html
添加一个自己做的用pointnet++做的书缝识别项目,GitHub里面有数据集和代码:https://github.com/struggler176393/Pointnet_book_seam。文章来源地址https://www.toymoban.com/news/detail-413960.html
到了这里,关于Pytorch1.7复现PointNet++点云分割(含Open3D可视化)(文末有一个自己做的书缝识别项目代码)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!