🍌
🍌🍌
作者简介:大家好啊,我叫DW,每天分享一些我新学到的知识,期待和大家一起进步
🍋
🍋🍋
系列专栏:STM32
🍎
🍎🍎
🍎🍎🍎
🌞小实验目标:控制舵机旋转🌞
🍊如有写得不好的地方欢迎大家指正🍊
创作时间:🍊🍊🍊2022年5月2日🍊🍊🍊
1. 舵机简介
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。![12.[STM32]PWM脉宽调制-舵机控制(一篇足以)](https://imgs.yssmx.com/Uploads/2023/04/414539-1.png)
本次实验使用的舵机是MG90S。
1.1 舵机控制
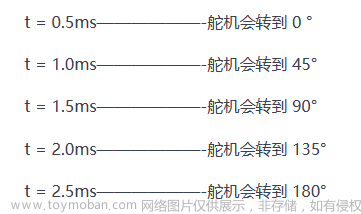
舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关系是这样的:
0.5ms--------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
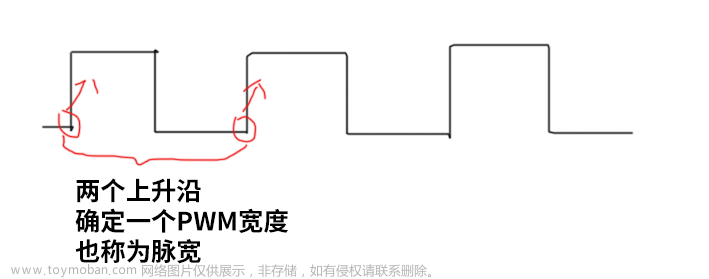
因此,我们只需要让IO口产生相应的脉宽就可以控制舵机的角度。如何产生PWM波:11.[STM32]PWM脉宽调制-呼吸灯
2. 占空比调节函数
PWM占空比的调节通过TIM_SetCompare函数进行相应调节。通过查找资料,我们可以知道有
TIM_SetCompare1
TIM_SetCompare2
TIM_SetCompare3
TIM_SetCompare4共四个,它们分别可以控制着CH1-CH4的占空比。
函数原形:
void TIM_SetCompare1(TIM_TypeDef* TIMx, u16 Compare1)
第一个参数传入相应定时器,本次实验选择TIM3的CH1,故选择TIM_SetCompare1、TIM3。
第二个参数是捕获比较 1 寄存器新值,即定时时间。
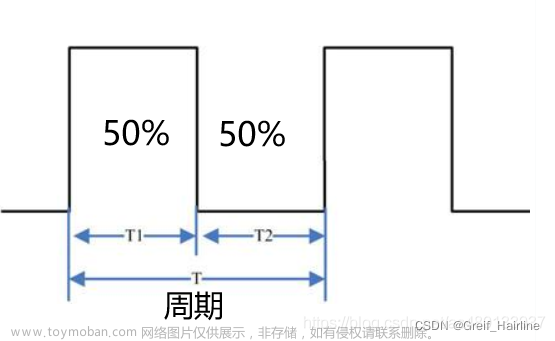
例如,我们想要控制舵机旋转,需要产生周期为20ms的脉冲,其操作如下:
PWM_UserConfig(200-1,7200-1);//50hz 20ms 72000
//72 000 000/7200=10 000 Hz
//10 000*0.020=200
每次进入中断服务程序间隔时间为:时间=1/频率×次数
重装载值Period为200,也就是计数到200产生一个更新事件或者中断(定时到了)。
计算过程:
时间=1/频率×次数 ,次数=时间x频率=0.020(20ms)x10 000=200
PWM_UserConfig(200-1,7200-1);
那么,我们想要产生1ms的脉宽该如何操作呢?
x=10 000hz*0.001=10,即Compare1=10,就可以实现舵机旋转45°。
TIM_SetCompare1(TIM3,10);
按照这个方法我们可以计算出其他对应的角度:
TIM_SetCompare1(TIM3,5);//0°
TIM_SetCompare1(TIM3,10);//45°
TIM_SetCompare1(TIM3,15);//90°
TIM_SetCompare1(TIM3,20);//135°
TIM_SetCompare1(TIM3,25);//180°
3.结语
今天的分享就到这里,谢谢大家的耐心阅读,如果觉得有用的话给个👍👍👍
🌜🌜🌜本章结束,我们下一章见🌜🌜🌜
参考资料:
1.STM32固件库手册
2.正点原子STM32不完全手册_库函数版本
3.学习视频链接文章来源:https://www.toymoban.com/news/detail-414539.html
资料已上传,需要自取文章来源地址https://www.toymoban.com/news/detail-414539.html
附录:全部程序
//main.c
#include "sys.h"
#include "delay.h"
#include "pwm.h"
int main(void)
{
//u8 flag = 0,time = 0;
delay_init();
PWM_UserConfig(200-1,7200-1);//50hz 20ms 72000
while(1){
TIM_SetCompare1(TIM3,5);//0
delay_ms(500);
TIM_SetCompare1(TIM3,10);//45
delay_ms(500);
// TIM_SetCompare1(TIM3,15);//90
//TIM_SetCompare1(TIM3,20);//135
//TIM_SetCompare1(TIM3,25);//180
//DuoJi();
}
}
//pwm.c
#include "pwm.h"
void PWM_UserConfig(u16 Period,u16 Prescaler){
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_InitStructure;
TIM_OCInitTypeDef PWM_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
//PA1 TIM2_CH2
GPIO_InitStructure.GPIO_Pin = CH1;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽输出
GPIO_Init(PWM_PROT,&GPIO_InitStructure);
TIM_InitStructure.TIM_Period = Period;
TIM_InitStructure.TIM_Prescaler = Prescaler;
TIM_InitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//不分割
TIM_InitStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数
TIM_InitStructure.TIM_RepetitionCounter = DISABLE;//不重复计数
TIM_TimeBaseInit(TIM3,&TIM_InitStructure);
TIM_Cmd(TIM3,ENABLE);//开启全局使能
//PWM配置
PWM_InitStructure.TIM_OCMode = TIM_OCMode_PWM1;
PWM_InitStructure.TIM_OutputState = TIM_OutputState_Enable;//输出使能
PWM_InitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//输出极性高
TIM_OC1Init(TIM3,&PWM_InitStructure);//通道几就选oc几
TIM_OC1PreloadConfig(TIM3,ENABLE);//预装在寄存器
TIM_SetCompare1(TIM3,0);//控制占空比
}
void DuoJi(void){
u16 com[] = {5,10,15,20,25,20,15,10,5};
for(u8 i = 0;i<9;i++){
TIM_SetCompare1(TIM3,com[i]);
delay_ms(500);
}
}
//pwm.h
#ifndef __PWM_H
#define __PWM_H
#include "sys.h"
#include "delay.h"
#define CH1 GPIO_Pin_6
#define PWM_PROT GPIOA
void PWM_UserConfig(u16 Period,u16 Prescaler);
void DuoJi(void);
#endif
到了这里,关于12.[STM32]PWM脉宽调制-舵机控制(一篇足以)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!