程序和进程
程序是包含一系列信息的文件,这些信息描述了如何在运行时创建一个进程:
程序是文件,只占用硬盘的大小;进程会占用cpu和内存资源
进程是正在运行的程序的实例。是一个具有一定独立功能的程序关于某个数据集合的一次运行活动。他是操作系统动态执行的基本单元,在传统的操作系统中,进程既是基本的分配单元,也是基本的执行单元
可以用一个程序来创建多个进程,进程是由内核定义的抽象实体,并为该实体分配用以执行程序的各项系统资源。从内核的角度看,进程由用户内存空间和一系列内核数据结构组成,其中用户内存空间包含了程序代码及代码所使用的变量,而内核数据结构则用于维护进程状态信息。记录在内核数据结构中的信息包括许多与进程相关的标识号(IDs)、虚拟内存表、打开文件的描述符表、信号传递及处理的有关信息、进程资源使用及限制、当前工作目录和大量的其他信息
单道、多道程序设计
- 单道程序,即在计算机内存中只允许一个的程序运行
- 多道程序设计技术是在计算机内存中同时存放几道相互独立的程序,使他们在管理程序控制下,相互穿插运行,两个或两个以上程序在计算机系统中同处于开始到结束之间的状态,这些程序共享计算机系统资源。引入多道程序设计技术的根本目的是为了提高CPU的利用率
- 对于一个单CPU系统来说,程序同时处于运行状态只是一种宏观上的概念,他们虽然都已经开始运行,但就微观而言,任意时刻,CPU上运行的程序只有一个
- 在多道程序设计模型中,多个进程轮流使用CPU。而当下常见CPU为纳秒级,1秒可以执行大约10亿条指令。由于人眼的反应速度是毫秒级,所以看似同时在运行。
时间片
时间片(timeslice)又称为“量子”(quantum)或“处理器片”(processor slice)是操作系统分配给每个正在运行的进程微观上的一段CPU时间。事实上,虽然一台计算机通常可能有多个CPU,但是同一个CPU永远不可能真正地同时运行多个任务,在只考虑一个CPU的情况下,这些进程“看起来像”同时运行的,实则是轮番穿插地运行,由于时间片通常很短(在Linxu上为5ms~800ms),用户不会感觉到
时间片由操作系统内核的调度程序分配给每个进程。首先,内核会给每个进程分配相等的初始时间片,然后每个进程轮番地执行相应的时间,当所有进程都处于时间片耗尽的状态时,内核会重新为每个进程计算并分配时间片,如此往复
Liunx内核的三种主要调度策略:
- SCHED_OTHER 分时调度策略
- SCHED_FIFO 实时调度策略,先到先服务
- SCHED_RR 实时调度策略,时间片轮转
Liunx中进程的调度算法
| 调度类 | 名称 | 优先级 |
|---|---|---|
| stop_sched_class | 停止类 | - |
| rt_sched_class | 实时类 | 0-99 |
| fair_sched_class | 完全公平调度类 | 100-139 |
| idle_sched_class | 空闲类 | - |
并行和并发
- 并行:指在同一时刻,有多条指令在多个处理器上同时执行
- 并发:指在同一时刻只能有一条指令执行,但多个进程指令被快速的轮换执行,使得在宏观上具有多个进程同时执行的效果,但在微观上并不是同时执行的,只是把时间分成若干端,使多个进程快速交替的执行

进程控制块(PCB)
为了管理进程,内核必须对每个进程所做的事情进行清楚的描述。内核为每个进程分配一个PCB进程控制块,维护进程相关的信息,Liunx内核的进程控制块是task_struct结构体

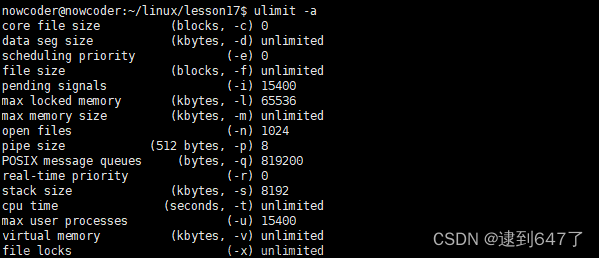
ulimit -a
上述命令可以查看当前系统使用的资源的上限
进程状态转换
进程的状态
进程状态反映进程执行过程的变化。这些状态随着进程的执行和外界条件的变化而转换。在三态模型中,进程状态分为三个基本状态,即就绪态,运行态,阻塞态。在五态模型中,进程分为新建态、就绪态、运行态、阻塞态、终止态
- 运行态:进程占有处理器正在运行
- 就绪态:进程具备运行条件,等待系统分配处理器以便运行。当进程已分配到除CPU以外的所有必要资源后,只要再获得CPU,便可立即执行。在一个系统中处于就绪状态的进程可能有多个,通常将它们排成一个队列,称为就绪队列
- 阻塞态:又称为等待态或睡眠态,指进程不具备运行条件,正在等待某个事件的完成

- 新建态:进程刚被创建时的状态,尚未进入就绪队列
- 终止态:进程完成任务到达正常结束点,或出现无法克服的错误而异常终止,或被操作系统及有终止权的进程所终止时所处的状态。进入终止态的进程以后不再执行,但依然保留在操作系统中等待善后。一旦其他进程完成了对终止态进程的信息抽取之后,操作系统将删除该进程

进程相关命令
- 查看进程
- ps aux / ajx
- a: 显示终端上的所有进程,包括其他用户的进程
- u:显示进程的详细信息
- x:显示没有控制终端的进程
- j:列出与作业控制相关的信息
ps aux
生成出来的是系统进程的快照,并不能实时显示
%MEN代表内存占用比
VEZ代表进程虚拟大小
RSS代表页面文件占用
tty
上述命令可以查看当前进程对应的终端

ps ajx

PPID代表父进程,PID为本进程,PGID为组进程,SID为会话
- 实时显示进程动态
top
可以在使用top命令时加上-d来指定显示信息更新的时间间隔,在top命令执行后,可以按以下按键对现实的结果进行排序- M 根据内存使用量排序
- P 根据CPU占有率排序
- T 根据进程运行时间长短排序
- U 根据用户名来筛选进程
- K 输入指定的PID杀死进程
kill PID
输入对应的PID就可以杀死对应的进程,但是不能杀死自己的进程
若想要杀死自己的进程,需要添加上参数-9
kill -9 PID
更多的参数可以输入下面的代码来查看
kill -l
也能根据进程名称来杀死进程
killall name
进程号和相关函数
- 每个进程都由进程号来标识,其类型为pid_t(整型),进程号的范围:0~32767 。进程号总是唯一的,但可以重用。当一个进程终止后,其进程号就可以再次使用
- 任何进程(除init进程)都是由另一个进程创建,该进程称为被创建进程的父进程,对应的进程号称为父进程号(PPID)
- 进程号是一个或多个进程的集合。他们之间相互关联,进程组可以接收同一终端的各种信号,关联的进程有一个进程组好(PGID)。默认情况下,当前的进程号会当做当前的进程组号
进程号和进程组相关函数:
- pid_t getpid(void);
- pid_t getppid(void);
- pid_t getpgid(pid_t pid);
进程创建
系统允许一个进程创建新进程,新进程即为子进程,子进程还可以创建新的子进程,形成进程树结构模型
#include <sys/types.h>
#include <unistd.h>
pid_t fork(void);
作用:用于创建子进程
返回值:如果成功,在父进程中返回子进程的PID,在子进程中返回0,如果失败,在父进程中返回-1,子进程不会被创建
如何区分父进程和子进程:通过fork的返回值
失败的两个主要原因:
- 当前系统的进程数已经达到了系统规定的上限,这时errno的值被设置为EAGAIN
- 系统内存不足,这时errno的值被设置为ENOMEN
#include <sys/types.h>
#include <unistd.h>
#include <stdio.h>
int main(){
//创建子进程
pid_t pid = fork();
//判断是父进程还是子进程
if(pid > 0){
printf("pid : %d\n",pid);
//如果大于0,返回的是创建的子进程的进程号
printf("i am parent process,pid:%d,ppid:%d\n",getpid(),getppid());
}else if(pid == 0){
//当前是子进程
printf("i am child process ,pid: %d,ppid :%d\n",getpid(),getppid());
}
//for循环
for(int i = 0;i < 5;i++){
printf("i:%d\n",i);
sleep(1);
}
return 0;
}
fork()以后,子进程的用户数据和父进程一样。
内核区也会拷贝过来,但是PID不一样
栈空间里,父进程返回的是子进程的PID,子进程返回0,所以在下面的if才会进入不同的代码块
若在if前声明一个变量num,然后在if里面各自做不同的操作
虽然初始值相同,但是因为不同的操作,父子进程里的num后续并不会相同,且互不相干
Linux的fork()使用的是通过写实拷贝实现。写时拷贝是一种可以推迟甚至避免拷贝数据的技术。内核此时并不赋值整个进程的地址空间,而是让父子进程共享同一个地址空间。只用在需要写入的时候才会复制地址空间,从而使各个进行拥有各自的地址空间。也就是说,资源的复制是在需要写入的时候才会进行,在此之前,只有以只读方式共享。
注意:fork之后父子进程共享文件,fork产生的子进程与父进程相同的文件的文件描述符指向相同的文件表,引用计数增加
父子进程的关系
不同点:
- fork()函数的返回值不同
父进程中:>0 返回的子进程的ID
子进程中: =0 - PCB中的一些数据
当前的进程的id pid
当前的进程的父进程的id ppid
信号集
共同点:
某些状态下:子进程刚被创建出来,还没有执行任何写数据的操作
- 用户区的数据
- 文件描述符表
父子进程对变量是不是共享的?
- 刚开始的时候,是一样的,共享的。如果修改了数据,不共享了
- 读时共享,写时拷贝
GDB多进程调试
使用GDB调试的时候,GDB默认只能跟踪一个进程,可以在fork函数调用之前,通过指令设置GDB调试工具跟踪父进程或者跟踪子进程,默认跟踪父进程
设置调试父进程或子进程:
set follow-fork-mode [parent(默认) | child]
设置调试模式
set detach-on-fork [on | off]
默认为on,表示调试当前进程的时候,其他的进程继续运行,如果为off,调试当前进程的时候,其他进程被GDB挂起
查看调试的进程:
info inferiors
切换当前调试的进程:
inferior id
使进程脱离GDB调试:文章来源:https://www.toymoban.com/news/detail-416060.html
detach inferiors id文章来源地址https://www.toymoban.com/news/detail-416060.html
到了这里,关于C++linux高并发服务器项目实践 day5的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!