vx:嵌入式工程师成长日记
https://mp.weixin.qq.com/s?__biz=Mzg4Mzc3NDUxOQ==&mid=2247484170&idx=1&sn=3fa68d0fbf30cf614e8779abf38c3e2b&chksm=cf430652f8348f44e4b95bb7b22ce7f9f5a86e13f421741aefd08cedb169708309c79566ab1f&token=1923877603&lang=zh_CN#rdhttps://mp.weixin.qq.com/s?__biz=Mzg4Mzc3NDUxOQ==&mid=2247484170&idx=1&sn=3fa68d0fbf30cf614e8779abf38c3e2b&chksm=cf430652f8348f44e4b95bb7b22ce7f9f5a86e13f421741aefd08cedb169708309c79566ab1f&token=1923877603&lang=zh_CN#rd
具体功能实现
接通电源后,电机开始正转,转够一圈后,电机开始反转,同时在OLED上会显示forward和reverse分别表示正反转
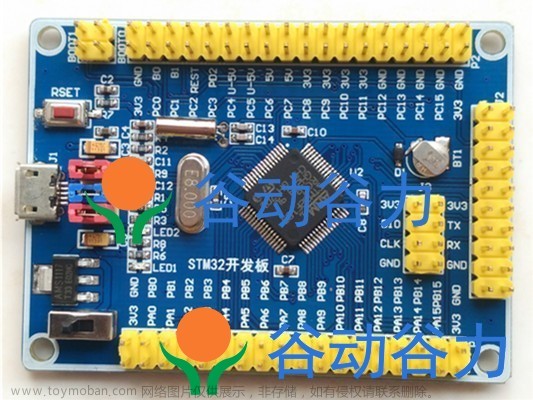
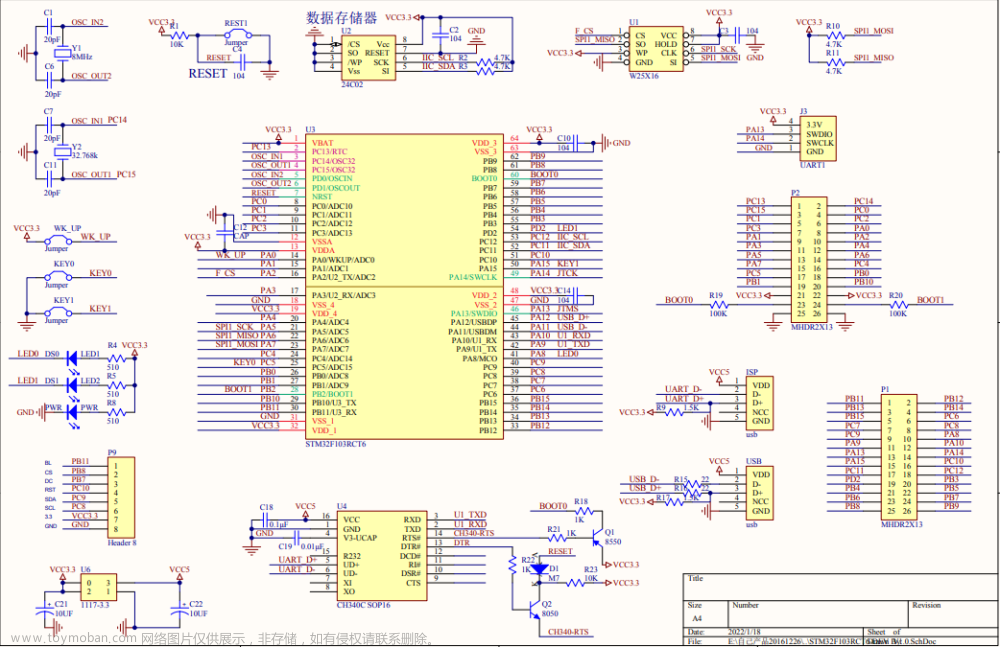
STM32F103RCT6原理图
器件
STM32F103RCT6,OLED屏,十根杜邦线 ,ULN2003步进电机拓展版,28BYJ-48步进电机
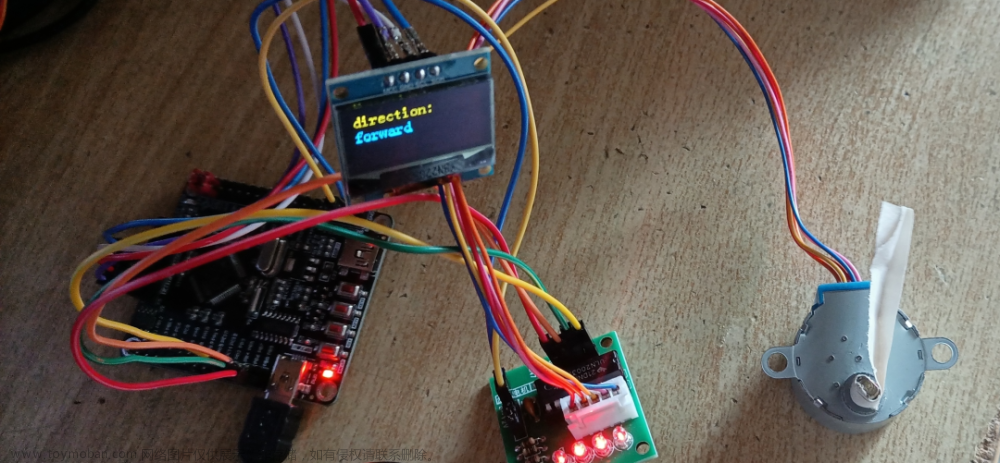
正反转展示图
正转展示图

此时,OLED屏上显示forward,电机正转
反转展示图

此时,OLED上显示reverse,电机反转
03
知识介绍
驱动电机的方法
①1相励磁法:
每一瞬间只有一个线圈相通,其它休息。
优点:简单,耗电低,精确性良好。
缺点:力矩小,振动大,每次励磁信号走的角度都是标称角度。
1相励磁法 A->B->C->D
②2相励磁法:
每一瞬间有两个线圈导通。
优点:力矩大,震动小。
缺点:每励磁信号走的角度都是标称角度。
2相励磁法 AB->BC->CD->DA
③1-2相励磁法:
1相和2相交替导通。
优点)精度较高,运转平滑,每送一个励磁信号转动1/2标称角度,称为半步驱动。(前两种称为4相4拍,这一种称为4相8拍)
1-2相励磁法 A-->AB-->B->BC->C-->CD->D-->DA
正转和反转代码(1-2相励磁法)
逆时针:
u8 phasecw[8] =
{0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09};
//1000,1100,0100,0110,0010,0011,0001,1001
顺时针:
u8 phaseccw[8]=
{0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08};
// 顺时针
//1001,0001,0011,0010,0110,0100,1100,1000
上图是ULN2003步进电机驱动模块,可以看到上面的标号分别是A,B,C,D,因此代码我们可以按这个顺序来理解。
比如:AB是1100,BC是0110,CD是0011等
ULN2003电机驱动模块
上图为驱动模块原理图
ULN2003是高耐压、大电流复合晶体管阵列,由七个硅NPN 复合晶体管组成,每一对达林顿都串联一个2.7K 的基极电阻,在5V 的工作电压下它能与TTL 和CMOS 电路直接相连,可以直接处理原先需要标准逻辑缓冲器来处理的数据。
步进电机采用五线四相直流电速电机
其中:电压为5V,步进角度为5.625°,减速比为1/64,所以步距角为5.625/64=0.087°
意思就是,电机内部的转自转过5.626°,但是由于减速64倍所以外部的轴只转动0.087°。所需脉冲是360/0.087=4096个,由于采用四相八拍驱动,因此八个脉冲为一个周期,所以外部转动一周需要4096/8=512个周期。
04
主函数代码(C语言)KEIL5实现
main.c(主函数代码)
#include "stm32f10x.h"
#include "delay.h"
#include "step.h"
#include "OLED.h"
int main(void)
{
Step_Motor_GPIO_Init();
delay_init();
OLED_Init();
OLED_ShowString(1,1,"direction:");
while(1){
motorNcircle(1,true);//n为步进电机转动的圈数,position为正转或者反转
delay_ms(20);
motorNcircle(1,false);//n为步进电机转动的圈数,position为正转或者反转
}
}
//step.c(电机驱动函数)
#include "OLED.h"
#include "stdbool.h"
#include "sys.h"
#include "delay.h"
#include "step.h"
u8 phasecw[8] =
{0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09};
// 逆时针
//1000,1100,0100,0110,0010,0011,0001,1001
u8 phaseccw[8]=
{0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08};
// 顺时针
//1001,0001,0011,0010,0110,0100,1100,1000
//引脚初始化
void Step_Motor_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_7|GPIO_Pin_6|GPIO_Pin_5;
GPIO_Init(GPIOB,&GPIO_InitStructure);
}
//引脚映射
void SetMotor(unsigned char InputData)
{
if(InputData&0x01)
{
GPIO_SetBits(GPIOB,GPIO_Pin_5);
}
else
{
GPIO_ResetBits(GPIOB,GPIO_Pin_5);
}
if(InputData&0x02)
{
GPIO_SetBits(GPIOB,GPIO_Pin_6);
}
else
{
GPIO_ResetBits(GPIOB,GPIO_Pin_6);
}
if(InputData&0x04)
{
GPIO_SetBits(GPIOB,GPIO_Pin_7);
}
else
{
GPIO_ResetBits(GPIOB,GPIO_Pin_7);
}
if(InputData&0x08)
{
GPIO_SetBits(GPIOB,GPIO_Pin_8);
}
else
{
GPIO_ResetBits(GPIOB,GPIO_Pin_8);
}
}
//步距角5.625 360/5.625=64 减速比1/64
//故64*64个脉冲转一圈
//n圈数
//position 方向
void motorNcircle(int n,bool position)//n为步进电机转动的圈数,position为正转或者反转
{
int i,j,k=0;
for(j=0;j<n;j++)
{
for(i=0;i<64*5.625;i++)
{
for(k=0;k<8;k++)
{
if(1 == position)
{
OLED_ShowString(2,1,"forward");
SetMotor(phasecw[k]);
}
else
{
OLED_ShowString(2,1,"reverse");
SetMotor(phaseccw[k]);
}
delay_ms(1);
}
}
}
}工程文件请在前面vx处领取~
问题解答
Q
为什么stm32需要接ULN2003才能驱动?
A
因为stm32的电流还达不到步进电机所需的最小电流,而ULN2003可以增大stm32的电流,提高驱动能力
 文章来源:https://www.toymoban.com/news/detail-416178.html
文章来源:https://www.toymoban.com/news/detail-416178.html
文章来源地址https://www.toymoban.com/news/detail-416178.html
到了这里,关于设计分享 | STM32F103RCT6利用ULN2003驱动步进电机正反转的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!