申明以下都是个人理解,仅供参考。如果错误欢迎指教。本文不讲底层,根据实际使用来逆向讲解。
1.什么是pwm?
pwm最简单的理解就是“功率”,调节PWM的占空比就是调节功率。
2.如何调节占空比?

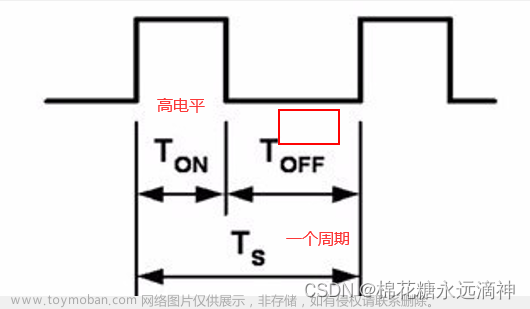
图1
根据图1很容易看出来调节CCRX的值就可以调节占空比,CCRX的值越大,占空比越大(在不超过ARR时)。
在默认有效值为高电平的时,当CCRX的值等于ARR时PWM的波形为一条直线(即全是逻辑电平1)全功率输出。
3.什么是有效值,什么是CCRX,什么是ARR,什么是占空比?
先贴一段代码:
void TIM2_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2| RCC_APB1Periph_TIM3, ENABLE); //使能定时器2/3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIO外设时钟
//引脚功能配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1| GPIO_Pin_2; //TIM2_CH1 // TIM2_CH2 // TIM3_CH1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出!!
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//初始化TIM2
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分频系数:不分频 //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM2 Channel1、Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OCInitStructure.TIM_Pulse = 0; //跳变值
TIM_OC1Init(TIM2, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM2 OC1 通道1
TIM_OC2Init(TIM2, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM2 OC2 通道2
TIM_OC3Init(TIM2, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM2 OC2 通道3
TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Enable); //使能TIM2在CCR2上的预装载寄存器
TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Enable); //使能TIM2在CCR2上的预装载寄存器
TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Enable); //使能TIM2在CCR2上的预装载寄存器
TIM_ARRPreloadConfig(TIM2, ENABLE); // 使能TIM2重载寄存器ARR
TIM_Cmd(TIM2, ENABLE); //使能TIM2
}
TIM_SetCompare2(TIM3,400);
void TIM_SetCompare2(TIM_TypeDef* TIMx, uint16_t Compare2)
{
/* Check the parameters */
assert_param(IS_TIM_LIST6_PERIPH(TIMx));
/* Set the Capture Compare2 Register value */
TIMx->CCR2 = Compare2;
}CCRX:就是设置定时器的比较值,
ARR:自动重装载寄存器周期的值
PWM占空比=CCRX/ARR或者是WM占空比=(ARR-CCRX)/ARR
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
这句话就是用来设置有效值。
TIM脉冲宽度调制模式有两种(看别人总结的):
PWM1:TIMx_CNT<TIMx_CCRX,输出高电平(有效值默认为高),否则输出低电平。
PWM2:TIMx_CNT>TIMx_CCRX,输出高电平(有效值默认为高),否则输出低电平。
如图分析,即在t0-t1,t2-t3,t4-t5时间段输出高电平.
4.PWM输出频率
PWM输出频率=时钟频率/(ARR+1)*(PSC+1)
5.keil软件仿真波形输出
选择完模式,设置有效电平,设置CCRX,ARR就可以开始使用PWM了。
下图是软件仿真输出波形配置。

图2
配置图片如下,GPIOX_DIR.X 例如本例程使用的PA0则写为GPIOA_DIR.0。还有Display Type要选择为Bit。

图3
下图为PA0 PA1的波形。PA0,PA1分别为定时器2的通道1,通道2.如果显示no signel,参考软件仿真输出波形配置(图2)。

图4
上图波形是PWM1模式下生成的。
最后附上源码,有需要测试的可以下载 文章来源:https://www.toymoban.com/news/detail-416373.html
链接:https://pan.baidu.com/s/1S6e3zdv62SktAtIjBtD5DA
提取码:7n7b文章来源地址https://www.toymoban.com/news/detail-416373.html
到了这里,关于简单明了的说明STM32的PWM原理以及实现方法的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!