需要源码及原理图文件请私信!!!!
1、引言
人们对智能化的生活越来越向往,随着时代的快速发展单片机在我们日常生活中应用的也越来越广泛。单片机完成了由模拟电路和数字电路的传统设计模式过渡到以软件设计为主体的微控制技术时代。使得单片机在各种各样的生活场景中得到了广泛的应用。所以催生了我利用单片机,再结合移动通信做出这款基于单片机的监控电子婴儿床系统的想法。
该婴儿床设计针对现阶段独生子女父母对保姆照顾婴儿不周的担忧,利用单片机的控制技术,并结合wt588d语音播报和摇篮设计出具有监控功能的电子婴儿床系统。当出现父母担忧的几种情况时,该系统在一定的时间自动提醒监护人,并且会实时反馈信息,从而让监护人实时了解孩子的情况,能够安心工作。该婴儿床系统具有价钱便宜、功能实用、工作稳定可靠等优点。
我设计的这款监控婴儿床,外观上尚需润色不少,比如步进电机实现摇床功能要怎么具体的实现,此系统中只用步进电机来模拟;还有具体的婴儿床模型没有做出来;湿度传感器放置在哪里效果最佳,并能实现所要求的功能。
2、功能设计
- 每次婴儿在号哭时通过声音控制电路控制电机自动晃动,并且语音模块会自动播报小星星轻音乐安抚婴儿的情绪;
- 声控模块可以实时采集当前婴儿是否哭闹;
- 每次孩子撒尿导致被子湿了时,通过湿度感应器的信号启动自动报警,语音播报是否尿床,led指示灯亮;
- 步进电机通过ULN2003进行驱动,当需要安抚婴儿时,控制电机左右旋转来促使婴儿安静下来。
- 按键用来进行设置3种不同的模式,方便对不同的情况及时做出处理
系统结构框图

3、系统硬件设计
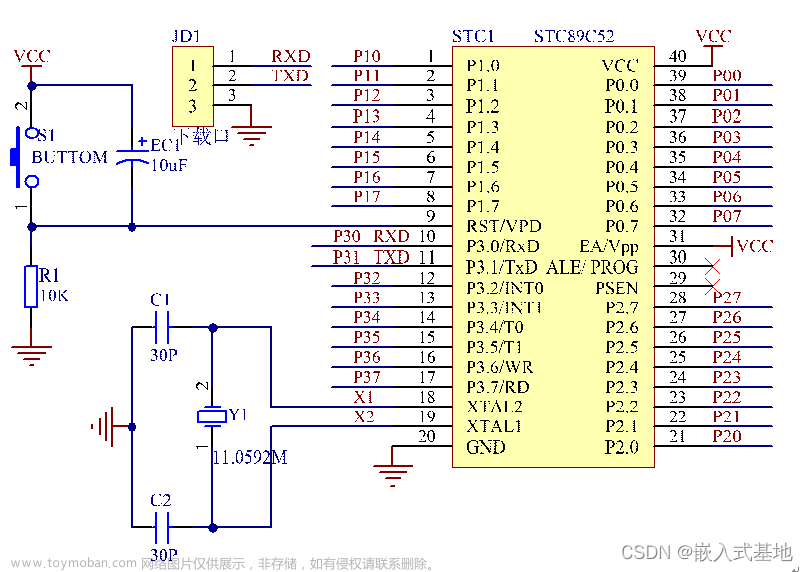
3.1声音电路的设计
声控电路算是本系统中比较重要的一个子电路,该电路由主要由直插电容式驻极体话筒MIC1、双电压比较器集成电路LM393、发光二极管D2、1uf电容C1、三极管Q1、电阻R4-R10组成。LM393是常用的电压比较器,每个LM393芯片中共有两个电压比较器[7]。发光二极管的亮度会随着直插电容式驻极体话筒采集的声音的大小产生明亮变化,声音越大,发光二极管越亮。通过声控电路与步进电机驱动电路连接起来,即能实现:
3.2语音播报电路的设计
本次设计的报警模块采用wt588d语音芯片进行语音播报和报警提示。当超声波检测到距离后或者是低于安全距离STC89C52单片机控制语音芯片来播报当前的内容。
下图为语言芯片电路引脚图,扬声器就是喇叭用来进行语音播报,p02是复位引脚也可以不接,只有P03口是数据引脚,Wt588d语音芯片他是通过外部的minu下载器下载相应的语音文件,比如播报欢迎光临,那么我们就需要通过minu下载器编辑这段语音欢迎光临。然后生成一个地址,当单片机需要播报这端语音的时候,就会发送指令给wt588d,进行语音播报。
点击“操作”→“地址设置”,能设置各个按键(I/O口)直接触发的地址。

3.3独立按键电路的设计
系统中一共使用了三个独立按键:K1、K2和K3。本次设计按键主要是用来进行功能设置。当我们按下K1按键时,会进入到模式1,按下K2时,会进入模式二。K3进行模式三。单片机的按键电路其实就是一个对高低电平的检测。我们当按键被按下时,单片机的IO口会检测为低电平。单片机就会来根据电平特性判断程序应该要执行的操作。但是在写按键函数的时候有几点是需要我们注意的。当按键被按下时会产生抖动,所以要写一个去抖的函数。还有就是要有短暂的延迟。按键和电路连接引脚:
3.4模拟摇床(步进电机驱动电路)的设计
本系统采用步进电机驱动电路来模拟摇床系统,由声控电路来触发。如图3-5步进电机28BYJ48型四相八拍电机,电压为DC5V。当对步进电机施加一系列连续不断的控制脉冲时,它可以连续不断地转动。因为单片机的I/O口电流太小,无法驱动步进电机工作,因而要连接一个ULN2003实现电流的放大作用[8]。ULN2003的1B-4B端口分别连接单片机的P20-P23,端口1C-4C分别接到相对应的电机接口B、C、D、V。
3.5液晶显示电路设计
我选择了LCD1602液晶显示器。它是一款工业字符型液晶,可以显示两行数据,每行可以显示十六个符号、字母或者数字,刚好可以满足设计的需要。它体积小巧,功耗较低,显示效果良好,是一款非常实用的液晶显示设备。
LCD1602液晶显示在执行程序指令之前要进行模块标志位的忙信号,只有当它的忙标志位为低电平时才表示可以执行指令。
3.6尿液检测电路设计
检测婴儿是否尿床我们主要是通过水位传感器进行采集然后通过LM393比较器进行判断主要特点如下:
(1)工作电源电压范围宽,单电源、双电源均可工作,单电源:2~36V,双电源:±1~±18V;
(2)消耗电流小,Icc=0.8mA;
(3)输入失调电压小,VIO=±2mV;
(4)共模输入电压范围宽,Vic=0~Vcc-1.5V;
(5)输出与TTL,DTL,MOS,CMOS 等兼容;
(6)输出可以用开路集电极连接“或”门;
4、系统软件设计
4.1 系统主流程图

4.2按键程序流程图设计
按键电路有四个引脚。其中两两相同。我们在连接电路的时候只需要连接2个引脚就可以了。连接的方式就是上图所示。工作远离其实就是一个对信号的高低电平检测。在我们按键被按下时,单片机引脚的IO口就会检测为低电平。这些IO口电平特性的改变就会程执行相应的功能操作。判断按键是否按下if(K10){while(K10)去抖;mode++;模式切换 if(mode3)数字减 mode=0模式切换; else if(K20){delay_key()延迟;然后while(K20);是否按下模式为加if(mode1) {Max++;到最大 if(Max》=3){Max=1;}。4个按键分别表示加、减、确定和手动放水功能。在不同页面表示不同的功能。分别用3个函数执行不同的操作,注意进行延时操作,防止误差。
4.3步进电机流程图
控制电动机正反转为本次设计自动翻盖的部分。系统开始工作后,判断电机是否需要正转,若需要就依次给AB、BC、CD、DA通电实现正转,正转结束后延时3m电机开始反转,即依次给AB、AD、CD、CB充电。
4.4液晶屏幕流程图设计
LCD 1602有16个引脚,其中RS、RW的值控制单片机对它的读写:
LCD1602液晶显示在执行程序指令之前要进行模块标志位的忙信号,只有当它的忙标志位为低电平时才表示可以执行指令。
LCD1602要显示字符时,就要获得该字符的现实的RAM地址。它内部的控制寄存器有11条控制指令,包括清屏,光标移位等指令。
 文章来源:https://www.toymoban.com/news/detail-416880.html
文章来源:https://www.toymoban.com/news/detail-416880.html
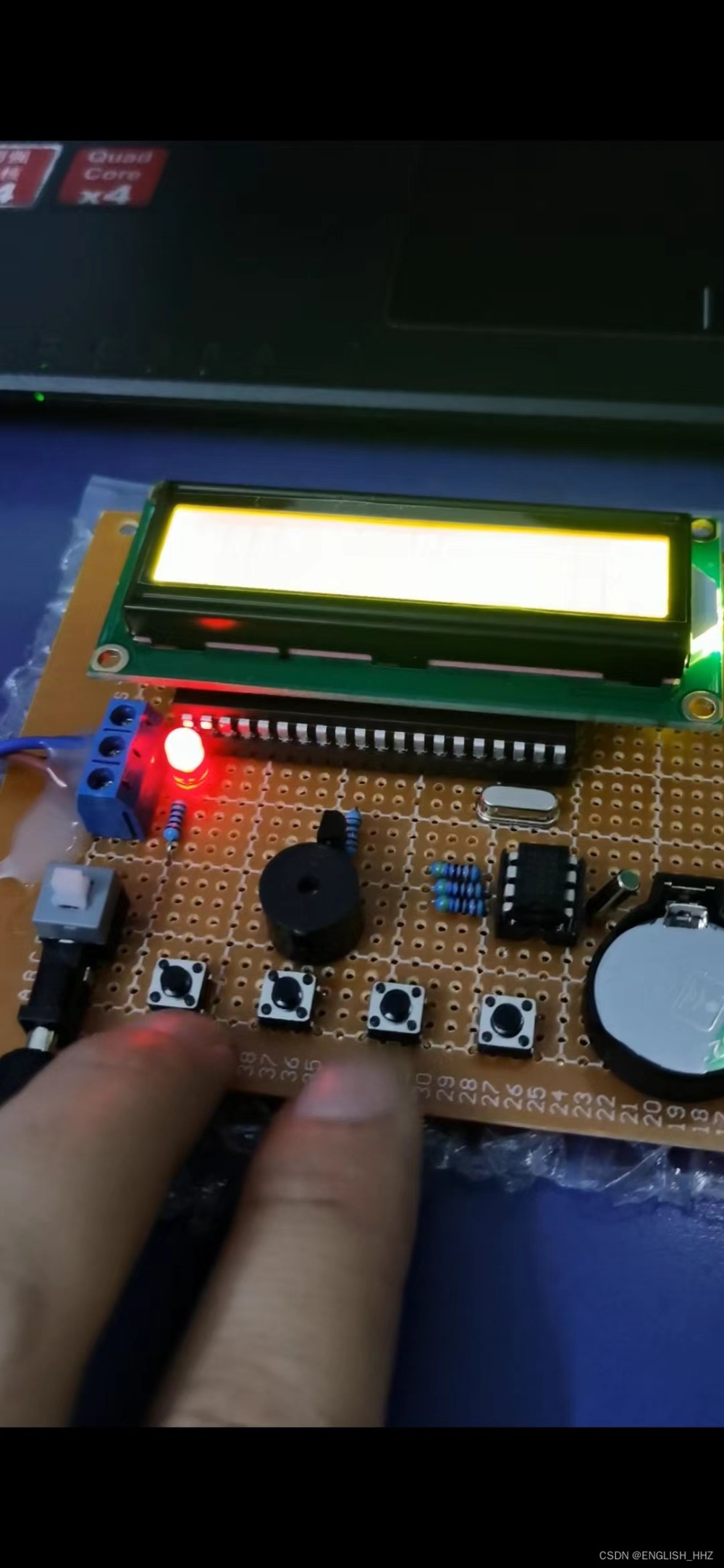
实物图及PCB

 文章来源地址https://www.toymoban.com/news/detail-416880.html
文章来源地址https://www.toymoban.com/news/detail-416880.html
部分源码
#include <reg52.h> //调用单片机头文件
#include <intrins.h>
#include "lcd1602.h"
#include "StepMotor.h"
#define uchar unsigned char //无符号字符型 宏定义 变量范围0~255
#define uint unsigned int //无符号整型 宏定义 变量范围0~65535
#include "WT588D.h"
//按键引脚定义
sbit KEY1 = P3^5;
sbit KEY2 = P3^6;
sbit KEY3 = P3^7;
sbit ShiDu = P1^0;//湿度传感器
sbit LED = P1^1;
sbit Voice = P1^2;//声音传感器
bit openFlag = 0;//电机开启标志
bit Mode = 0;//0是自动模式,1是手动模式
uint DJ_TIME = 0;//电机开启时间
/*********************定时器1初始化******************/
void time_init()
{
TMOD |= 0X10;
TH1=0x4c;//50ms
TL1=0x00;
ET1 = 1;
TR1 = 1;//开启定时
EA = 1; //开总中断
}
void keyscan()
{
if(KEY1 == 0)//切换键按下
{
delay_ms(10);
if(KEY1 == 0)
{
while(!KEY1);//等待按键松开
Mode = !Mode;
if(Mode==0)lcd_write_str(0, 1, "MODE: ZIDONG ");
else lcd_write_str(0, 1, "MODE: SHOUDONG ");
openFlag = 0;
}
}
if(Mode==1)//手动模式
{
if(KEY2 == 0)//手动开关键按下
{
delay_ms(10);
if(KEY2 == 0)
{
while(!KEY2);
openFlag = 1;
}
}
if(KEY3 == 0)//手动开关键按下
{
delay_ms(10);
if(KEY3 == 0)
{
while(!KEY3);
openFlag = 0;
}
}
}
}
void motoRotate()//电机处理
{
static uint djcount=0;
static bit flag = 0;
if(flag == 0)
{
djcount++;
if(djcount < 30)
{
MotorCW();//正转
}
else
{
if(djcount < 130)
{
MotorStop();//电机停止
}
else
{
flag = 1;
djcount = 130;
}
}
}
else
{
djcount--;
if(djcount > 100)
{
MotorCCW();//电机反转
}
else
{
if(djcount<=0){flag = 0;djcount=0;}
MotorStop();//电机停止
}
}
}
void main()
{
uint sy_count1 = 0;
uint sy_count2 = 0;
uint yuyin = 0;
bit flag = 0;
time_init();//定时器初始化
lcd_init();//1602初始化
lcd_write_str(0, 0, "STATE: CLOSE ");
lcd_write_str(0, 1, "MODE: ZIDONG ");
while(1)
{
keyscan();
if(Mode == 0)//在自动模式下
{
if(Voice == 0)//检测到有声音
{
if(sy_count1++ > 10)//检测哭声是否延续
{
DJ_TIME = 60;//电机开启时间1分钟
openFlag = 1;//电机开启
sy_count1 = 0;
if(ShiDu==0)Line_1A(1);//播报歌曲
}
}
else
{
if(sy_count2++ > 200)
{
sy_count2 = 0;
sy_count1 = 0;
}
}
}
if(ShiDu==1)//检测到尿不湿湿了
{
LED = 0;
if(flag == 0)//只播报一次
{
flag = 1;
Line_1A(0);//播报
yuyin = 0;
}
if(flag==1)
{
if(yuyin++ > 400)
{
yuyin = 0;
Line_1A(0);//播报
}
}
}
else
{
LED = 1;flag = 0;
}
if(openFlag==1)//电机开启
{
lcd_write_str(0, 0, "STATE: OPEN ");
motoRotate();
}else
{
lcd_write_str(0, 0, "STATE: CLOSE");
MotorStop();//电机关闭
}
delay_ms(1);
}
}
void zd1() interrupt 3
{
static uchar cnt1=0;
TH1=0x4c;//50ms
TL1=0x00;
if(cnt1++ >= 20)//1s
{
cnt1 = 0;
if(DJ_TIME > 0)
{
DJ_TIME--;
}
else
{
if(Mode == 0)openFlag=0;
}
}
}
到了这里,关于基于51单片机的智能婴儿看护床设计的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!