目录
概述
HAL设置
定时器的编码器模式
定时器设置
常用函数
代码
概述
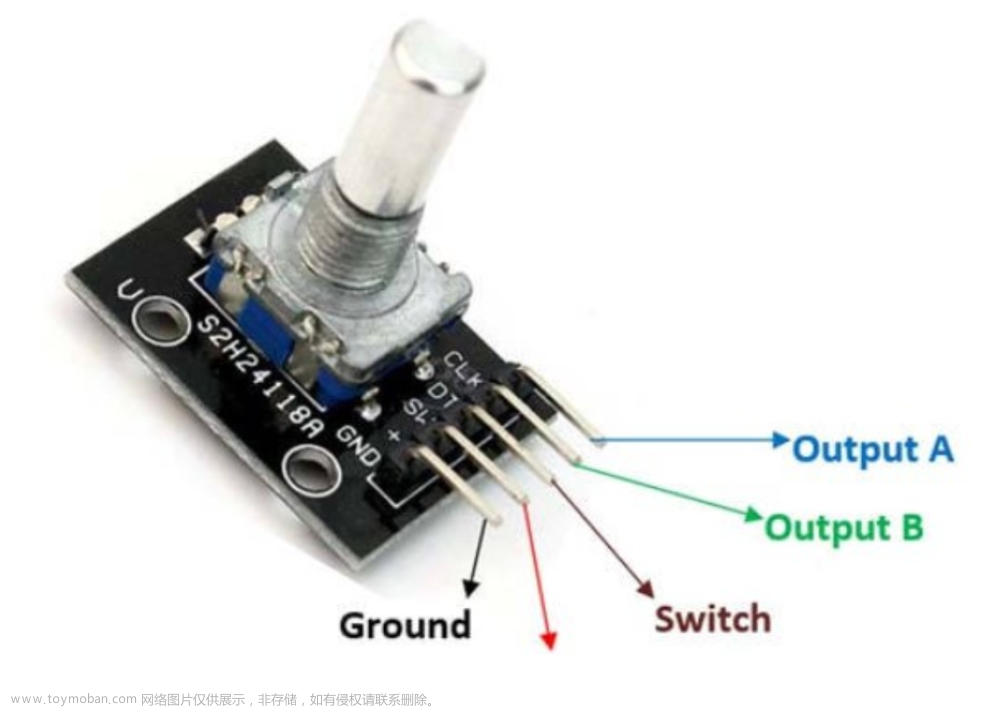
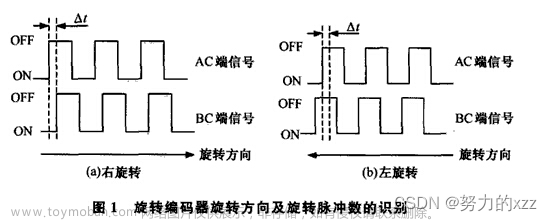
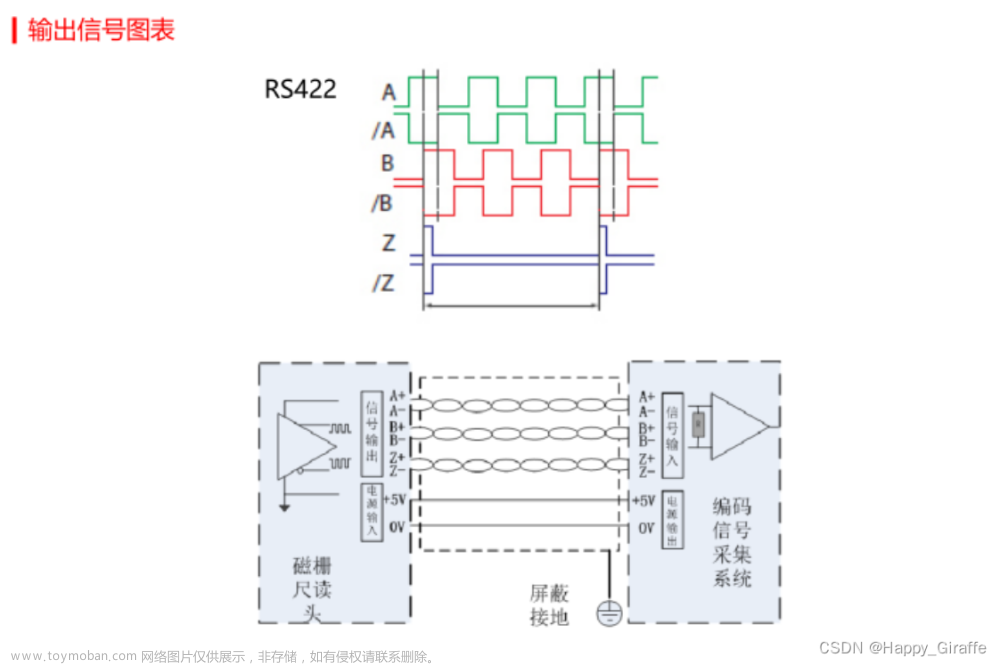
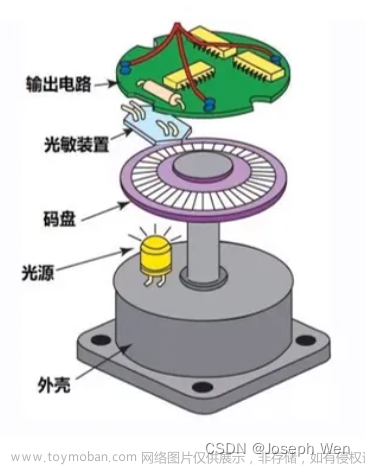
电机AB相增量型编码器的介绍和解码方法在这里介绍过了
电机编码器https://blog.csdn.net/m0_57585228/article/details/125791283
测速可以使用外部中断进行脉冲计数
很多型号的单片机中有专门的电路来计算脉冲的速度和方向,也就是定时器的编码器模式
因为是硬件计数,所以计数频率可以很高,性能比软件来的好,使用也比较方便
但是需要连接到指定的GPIO
这里以常见的4倍频测速 为例子进行设置
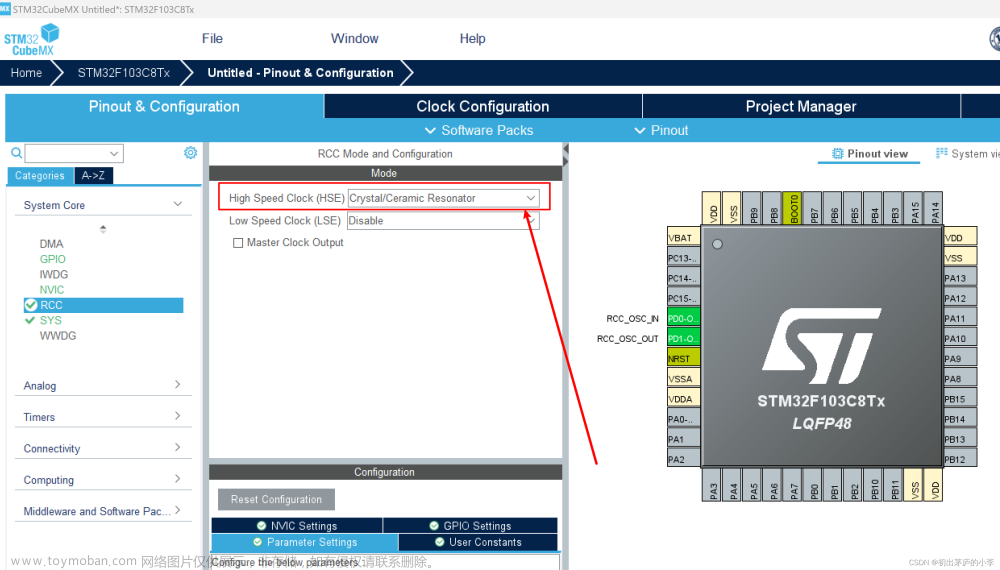
HAL设置
要开启:
定时器的编码器模式
定时器中断
一个周期性的定时器及中断
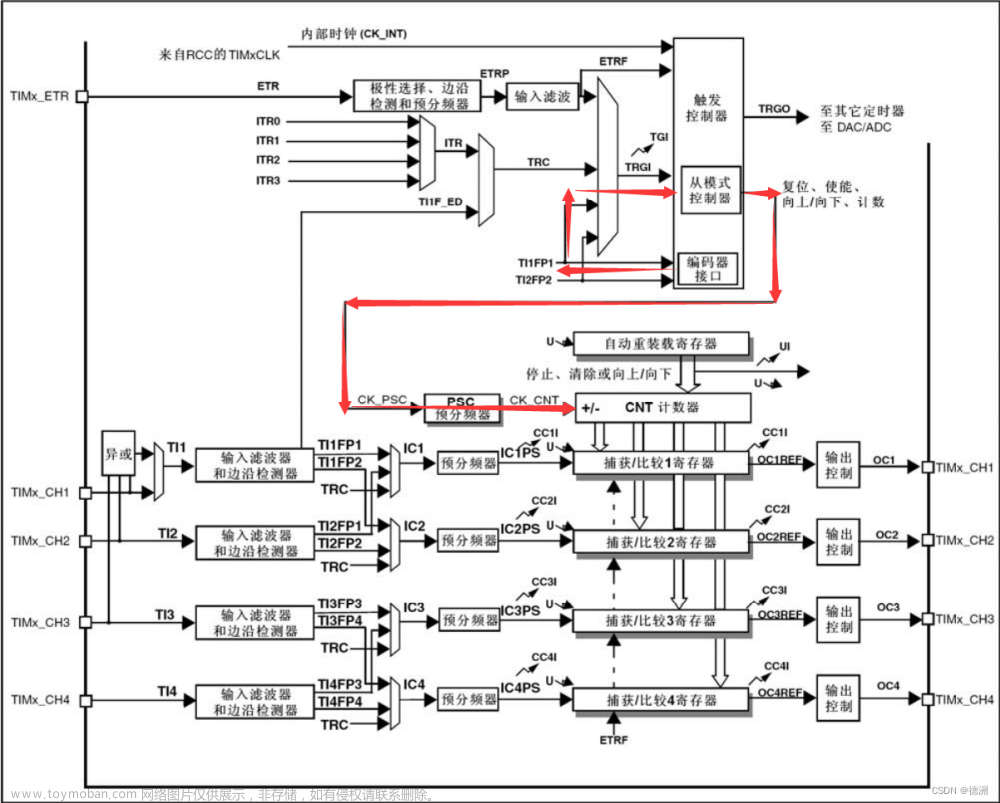
定时器的编码器模式
开启编码器模式

编码器的设置


解释一下
Polarity:是表示在哪个边沿(上升沿或者下降沿)更新数值
这个比较容易被误解,不管选择哪个,都是会在两种边沿进行计数
只是表示在哪个边沿进行更新数值
定时器设置
间隔一个固定的时间产生中断,这里设置的是10ms


常用函数
看这个的对应部分https://mp.csdn.net/mp_blog/creation/editor/125279297
代码
在main的初始化后循环之前加入
HAL_TIM_Encoder_Start(&htim2, TIM_CHANNEL_ALL); //开启编码器模式
HAL_TIM_Base_Start_IT(&htim2); //开启编码器的中断
HAL_TIM_Base_Start_IT(&htim3); //开启定时器的中断中断回调函数
int32_t Speed = 0;
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
int16_t zj;
if (htim == &htim2) //编码器
{
}
else if (htim == &htim3) //计算转速10ms
{
zj = __HAL_TIM_GetCounter(&htim2);//获取计数值
__HAL_TIM_SetCounter(&htim2, 0);//清空计数值
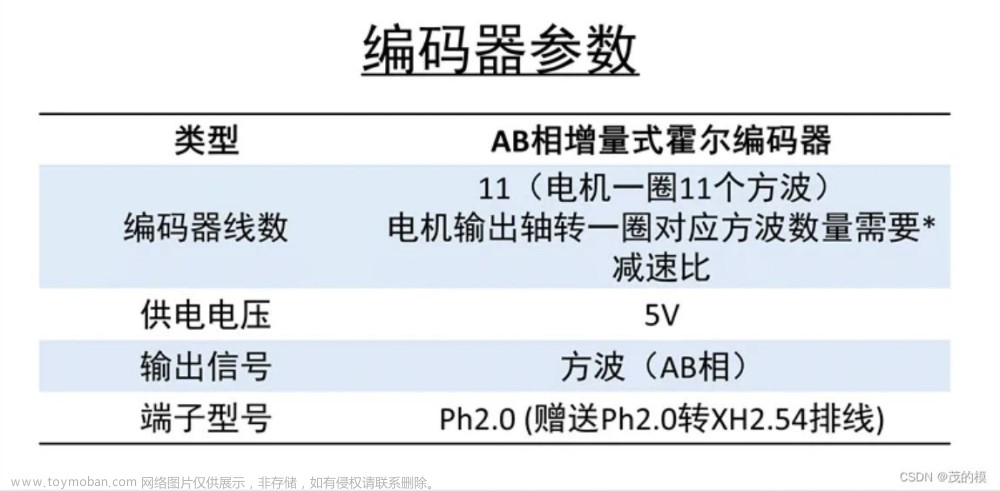
Speed = (float)zj / (4 * 96) * 100 * 60;//计算转速
printf("%d\r\n", Speed);//输出转速
}
}在这个函数中根据之前的公式计算处转速
这里要注意:
1.数据范围,不能溢出
2.正数代表正转,负数代表反转
3.需要加入强转(float),因为涉及到了除法,需要避免出现因为舍去位数,导致一直出现0
(或者乘法放到前步)文章来源:https://www.toymoban.com/news/detail-417501.html
到最后给速度赋值时在进行丢失小数位(当然也可以直接用小数进行运算)文章来源地址https://www.toymoban.com/news/detail-417501.html
到了这里,关于【STM32】【HAL库】定时器编码器模式测速的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!