PointCloud是open3d中用于点云处理的类,封装了包括几何变换、数据滤波、聚类分割等一系列实用算法。如无特别说明,本例中所有例程均基于斯坦福兔子的点云模型,下载地址:斯坦福标准模型
# 此行代码后面不再重复引入
import open3d as o3d
# 载入斯坦福兔子 rabbit.pcd文件需在当前python工作的文件夹中
pcd = o3d.io.read_point_cloud("rabbit.pcd")
读取和清除点云
一般点云数据的读取方法属于open3d.io的内容,但点云类也提供了一些生成点云的方法,最简单的是创建一个点云对象后,为其点集进行赋值,下例中xyz为Nx3的矩阵
import open3d as o3d
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(xyz)
如果想让pcd恢复到没有点云的状态,可以通过pcd.clear()来清除。
此外,点云类还提供了两个静态方法,create_from_depth_image和create_from_rgbd_image,使得用户可以通过深度图像或rgbd图像来生成点云。
由于手头没有深度图像,所以暂且用常见的RGB图像来演示一下这个功能,用下面这张图像生成深度图像,并绘制点云

import open3d as o3d
raw = o3d.io.read_image("test.jpg")
rgbd = o3d.geometry.RGBDImage.create_from_color_and_depth(raw, raw, convert_rgb_to_intensity=False)
inter = o3d.camera.PinholeCameraIntrinsic()
# 此为相机内部参数,是我乱写的 1920x1080为像素尺寸;(600,600)为x,y方向的焦距;(640,360)为相机位置
inter.set_intrinsics(1920, 1080, 600, 600, 640, 360)
pcd = o3d.geometry.PointCloud().create_from_rgbd_image(rgbd, inter)
o3d.visualization.draw_geometries([pcd])
绘图结果为

感觉很有冲击力。
点云的颜色可以通过paint_uniform_color来指定,后面会经常用到这个方法。
点云属性
点云类中封装了一些方法,用以提取点云的特征
对象属性
>>> pcd.dimension()
3 # 点云维度为3
>>> pcd.has_colors()
False # 点云无颜色
>>> pcd.has_covariances()
False # 对象中不含协方差矩阵
>>> pcd.has_normals()
False # 不含法向量
>>> pcd.has_points()
True # 点云中有点
>>> pcd.is_empty()
False # 点云不为空
>>> pcd.get_geometry_type()
<Type.PointCloud: 1> #几何体的类型是点云
点云特征
通过下面三个函数,可以获取点云对象 x , y , z x,y,z x,y,z三个坐标的最大值、最小值以及质心。
>>> pcd.get_max_bound()
array([8.7769 , 9.210494, 4.985259])
>>> pcd.get_min_bound()
array([-6.793 , -6.222866, -7.082071])
>>> pcd.get_center()
array([-1.00036164e-06, -1.81378116e-08, 4.44904992e-07])
点云框线
点云边框
open3d为点云对象提供两种生成边框的方法,分别是生成定向边框的get_oriented_bounding_box和生成轴对齐边框的get_axis_aligned_bounding_box。
obb = pcd.get_oriented_bounding_box()
obb.color = [1,0,0]
aabb = pcd.get_axis_aligned_bounding_box()
aabb.color = [0,1,0]
效果为

其中红色为定向边框,相当于最高效地将斯坦福兔子圈在了框中;绿色边框则横平竖直,每条框线均与坐标轴平行。
凸包
凸包的本质也是一种点云框线,但其采取的框选方案要更加紧密,即选取点云中最外侧的点连接成一个凸多面体。具体情况看下图就能明白
hull, _ = pcd.compute_convex_hull()
hull_ls = o3d.geometry.LineSet.create_from_triangle_mesh(hull)
o3d.visualization.draw_geometries([pcd, hull_ls])

几何变换
点云类提供了平移、缩放以及旋转的空间变换方法,分别用到函数translate、scale以及rotate,示例如下:
import copy
# 此为原始点云
pcd0 = o3d.io.read_point_cloud("rabbit.pcd")
# 1号点云,沿x轴移动20米
pcd1 = copy.deepcopy(pcd0).translate((20, 0, 0))
pcd1.paint_uniform_color([1, 0, 0]) #设为红色,100 表示rgb
# 2号点云,演示缩放
pcd2 = copy.deepcopy(pcd0).translate((40, 0, 0))
# 前一个参数为缩放比例;后一个参数为缩放后的位置,为必填项
pcd2.scale(0.5, center=pcd2.get_center())
pcd2.paint_uniform_color([0, 1, 1])
# 3号点云,通过欧拉角旋转
pcd3 = copy.deepcopy(pcd0).translate((0, -20, 0))
# 采用Euler角的方法生成旋转角,表示绕y轴旋转90°
thEuler = pcd3.get_rotation_matrix_from_xyz((0,np.pi/2,0))
pcd3.rotate(thEuler)
pcd3.paint_uniform_color([0, 1, 0])
# 4号点云,通过轴角法旋转
pcd4 = copy.deepcopy(pcd0).translate((20, -20, 0))
# 通过轴角表示法生成旋转角,表示绕y轴旋转60°
th = np.array([0, np.pi/3, 0]).T
thAxis = pcd4.get_rotation_matrix_from_axis_angle(th)
pcd4.rotate(thAxis)
pcd4.paint_uniform_color([0, 0, 1])
# 5号点云,通过四元数旋转
pcd5 = copy.deepcopy(pcd0).translate((40, -20, 0))
# 通过四元数法生成转角,表示绕x轴旋转180°
quart = np.array([0,0,0,1]).T
thQuart = pcd5.get_rotation_matrix_from_quaternion(quart)
pcd5.rotate(thQuart)
pcd5.paint_uniform_color([1, 0, 1])
# 5绘图函数可以输入点云列表
pcds = [pcd0, pcd1, pcd2, pcd3, pcd4, pcd5]
o3d.visualization.draw_geometries(pcds)
效果如下

其中平移和缩放没什么好说的,对于旋转,需要知道欧拉角有三个分量,分别是横滚、俯仰以及航向,代表绕x、y、z轴旋转。
考虑一架正在飞行的飞机,以某一时刻前后为x轴、左右为y轴、上下为z轴。则航向角就是飞机前进方向偏离的角度;俯仰角就是飞机头尾姿态的俯仰;横滚角描述的就是飞机翅膀的摆动。
欧拉角用于描述静态角度是没问题的,但用于表示旋转时会导致万向节死锁,简单来说就是飞机的航向角变化90°之后,其横滚轴变成了俯仰轴,而四元数则没有这个顾虑。
设欧拉角为 ( ψ , θ , ϕ ) (\psi,\theta,\phi) (ψ,θ,ϕ),则四元数可表示为
Q = [ cos ( ψ / 2 ) 0 0 sin ( ψ / 2 ) ] [ cos ( θ / 2 ) 0 sin ( θ / 2 ) 0 ] [ cos ( ϕ / 2 ) sin ( ϕ / 2 ) 0 0 ] \bold{Q}=\begin{bmatrix} \cos(\psi/2)\\0\\0\\\sin(\psi/2) \end{bmatrix}\begin{bmatrix} \cos(\theta/2)&0&\sin(\theta/2)&0 \end{bmatrix}\begin{bmatrix} \cos(\phi/2)\\\sin(\phi/2)\\0\\0 \end{bmatrix} Q=⎣ ⎡cos(ψ/2)00sin(ψ/2)⎦ ⎤[cos(θ/2)0sin(θ/2)0]⎣ ⎡cos(ϕ/2)sin(ϕ/2)00⎦ ⎤
点云类中的生成旋转矩阵的方法均为静态方法,可在不建立对象的情况下调用。
在演示变换的过程中调用了三个,其前缀均为get_rotation_matrix_from_,结尾是axis_angle表示通过欧拉角生成旋转矩阵;quaternion通过四元数;from_xyz则通过旋转向量。
open3d支持通过不同顺序的xyz数组创建旋转矩阵,由于三个坐标总计有6个组合,故而提供了6个静态方法。例如,针对向量
(
x
,
y
,
z
)
(x,y,z)
(x,y,z),其创建旋转矩阵的方法为get_rotation_matrix_from_xyz;对于
(
y
,
x
,
z
)
(y,x,z)
(y,x,z),只需将xyz换为yxz即可,非常方便记忆。
法线
对于不包含法线的点云,通过estimate_normals方法可以生成法线。
>>> pcd.estimate_normals()
>>> pcd.has_normals()
True # 可见pcd已经生成了法线
>>> o3d.visualization.draw_geometries([pcd], point_show_normal=True)

结果表明,把法线画出来实在是太丑了,可谓san值狂掉,属于精神污染了。
estimate_normals中有两个输入参数,其中search_param为k-d树的索引参数,用以生成法线时索引邻近点;fast_normal_computation为布尔型的参数,顾名思义,为True时将开启加速,但可能会导致数值不稳定。
点云类中对法线的操作主要是两种,一是归一化;二是定向。
normalize_normals可对法线进行归一化,并返回归一化法线后的点云。
定向则有三个方法:
-
orient_normals_consistent_tangent_plane:通过切平面定向 -
orient_normals_to_align_with_direction:通过对其坐标轴定向 -
orient_normals_towards_camera_location:通过相机位置定向
特征计算
协方差矩阵
对于点云中的某点 r i r_i ri,其协方差矩阵为
C i = 1 N ∑ i = 1 N ( r i − r ˉ ) ⋅ ( r i − r ˉ ) T C_i=\frac{1}{N}\sum^N_{i=1}(r_i-\bar r)\cdot(r_i-\bar r)^T Ci=N1i=1∑N(ri−rˉ)⋅(ri−rˉ)T
点云对象通过estimate_covariances函数计算每个点的协方差矩阵。此外,compute_mean_and_covariance可计算整个点云及其协方差的均值。
>>> M_and_C = pcd.compute_mean_and_covariance()
>>> pprint(M_and_C)
(array([-1.00036164e-06, -1.81378116e-08, 4.44904992e-07]),
array([[16.80007645, -5.77246083, 0.46407276],
[-5.77246083, 17.24825378, -2.5936246 ],
[ 0.46407276, -2.5936246 , 7.9322634 ]]))
最邻近距离和马氏距离
点云类为单点提供了两种距离属性,分别是最邻近距离和Mahalanobis距离,对应的函数分别是compute_nearest_neighbor_distance和compute_mahalanobis_distance。
最邻近距离即当前点和离它最近的其他点的距离;Mahalanobis距离的定义则为
D M ( r i ) = ( r i − r ˉ ) T C i ( r i − r ˉ ) D_M(r_i)=\sqrt{(r_i-\bar r)^TC_i(r_i-\bar r)} DM(ri)=(ri−rˉ)TCi(ri−rˉ)
其中 C i C_i Ci为该点对应的协方差矩阵。
索引、采样和滤波
点云索引
select_by_index(ids, invert)方法,可以通过点号对点云进行选取。其中ids为点号列表,invert参数默认为False,表示返回ids中的点;若将invert置为True,将返回ids之外的点。
import open3d as o3d
import numpy as np
pcd = o3d.io.read_point_cloud("rabbit.pcd")
idx = np.arange(10000)
# 索引对应的点
pIn = pcd.select_by_index(idx)
pIn.paint_uniform_color([1, 0, 0])
# 索引外的点云
pOut = pcd.select_by_index(idx, invert=True)
pOut.paint_uniform_color([0, 1, 0])
o3d.visualization.draw_geometries([pIn, pOut])
效果为

无效点剔除
remove_non_finite_points方法用于剔除NaN或者Inf之类的无穷值。其两个bool型的输入参数remove_nan和remove_infinite分别用于指明这两者。
统计滤波和邻域滤波
这两中滤波方法都是先得到符合要求的点索引,然后通过索引滤波,将这些点挑选出来,输出输出为滤波后的点云和点的索引号。
# 上接索引滤波的内容
pcd1 = copy.deepcopy(pcd).translate((20, 0, 0))
pcd2 = copy.deepcopy(pcd).translate((40, 0, 0))
# 统计滤波,参数分别表示K邻域点的个数和标准差乘数
sPcd, sInd = pcd1.remove_statistical_outlier(6, 2.0)
# 半径滤波,输入参数为邻域球内最少点数和邻域半径
rPcd, rInd = pcd2.remove_radius_outlier(9, 0. )
o3d.visualization.draw_geometries([sPcd, rPcd])
效果如下

这两种算法的逻辑是一样的,对于某点 x x x,选取距离 x x x最近的一些点,如果这些点的标准差小于设定值,则符合统计滤波的标准;如果均小于邻域半径,则符合半径滤波的标准。
下采样
点云对象共有三种下采样方案
| API | 输入参数 | |
|---|---|---|
| 随机下采样 | random_down_sample |
采样率 |
| 等序下采样 | uniform_down_sample |
采样间隔 |
| 体素下采样 | voxel_down_sample |
体素尺寸 |
其中随机下采样即根据采样率,随机选择一些点;等序则根据输入的采样间隔,则取等间隔的点的序号。
体素采样稍显复杂,会构建三维体素格网,然后输出格网内的点云质心,而非原始数据;若存在法线或颜色,则通通取均值。
此外,还有voxel_down_sample_and_trace函数,在体素采样的基础上,可以规定体素的边界范围。
downpcd = pcd.voxel_down_sample(20)
聚类算法
DBSCAN聚类
DBSCAN,即Density-Based Spatial Clustering of Applications with Noise,基于密度的噪声应用空间聚类。
在DBSCAN算法中,将数据点分为三类:
- 核心点:若样本 x i x_i xi的 ε \varepsilon ε邻域内至少包含了 M M M个点,则为核心点
- 边界点:若样本 x i x_i xi的 ε \varepsilon ε邻域内包含的点数小于 M M M,但在其他核心点的 ε \varepsilon ε邻域内,则为边界点
- 噪声:既非核心点也非边界点则为噪声
可见,DBSCAN算法需要两个参数,分别是邻域半径 ε \varepsilon ε和点数 M M M。
在open3d中,提供了cluster_dbscan接口,示例如下
import open3d as o3d
import numpy as np
import matplotlib.pyplot as plt
pcd = o3d.io.read_point_cloud("rabbit.pcd")
eps = 0.5 # 同一聚类中最大点间距
M = 50 # 有效聚类的最小点数
Labels = np.array(pcd.cluster_dbscan(eps, M))
print(np.max(Labels)) # 得到结果为3
cs = plt.get_cmap("jet")(Labels/3) # 伪彩映射
cs[labels < 0] = 0 # labels = -1 的簇为噪声,以黑色显示
pcd.colors = o3d.utility.Vector3dVector(cs[:, :3])
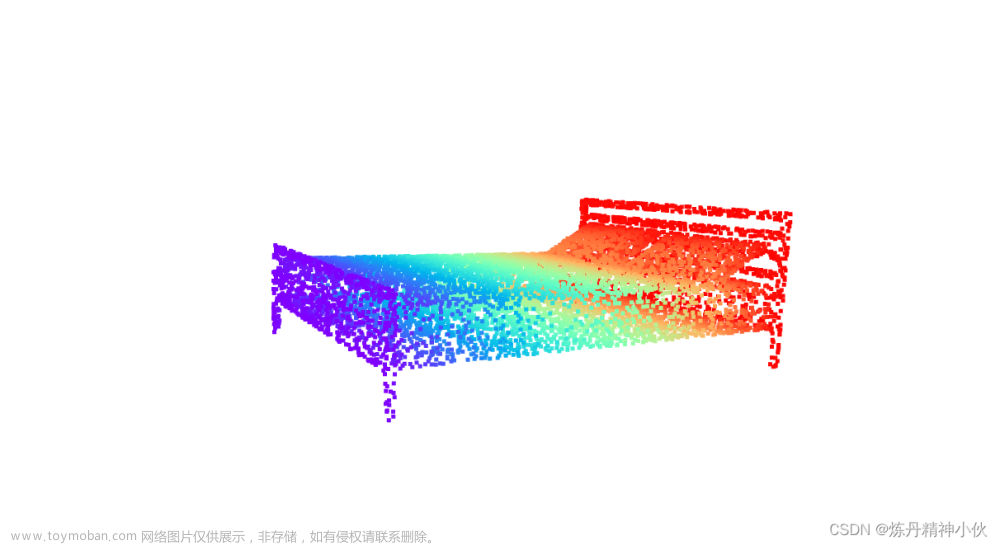
o3d.visualization.draw_geometries([pcd])
结果如图所示

由于斯坦福兔子的扫描点比较连续,所以分割效果不太还,为了更好地演示DBSCAN算法,可以用手骨模型,下载地址:斯坦福标准模型
RANSAC 平面分割
RANSAC,即RANdom SAmple Consensus,随机抽样一致算法。
以平面上的点集举例,假设点集中有一条直线 L L L, L L L外的点很少,均为噪声。
那么第一步,随机选取两个点连成一条直线 L ^ \hat L L^,那么这条直线有可能就是 L L L,也有可能是噪声连出来的莫名其妙的一条线。
接下来,随机抽取点集中的一些点,如果随机抽取的大部分点都落在 L L L附近,那么就说明 L ^ \hat L L^有很大的概率就是 L L L;否则说明不太像是 L L L。随着抽取出的直线越来越多,最后可以得到最接近 L L L的直线,从而完成了对点集的分割。
在Open3d中,提供了基于RANSAC算法的平面分割接口segment_plane
pcd = o3d.io.read_point_cloud("rabbit.pcd")
d = 0.2 # 内点到平面模型的最大距离
n = 5 # 用于拟合平面的采样点数
nIter = 50 # 最大迭代次数
# 返回模型系数plane和内点索引ids,并赋值
plane, ids = pcd.segment_plane(d, n, nIter)
# 平面方程
[a, b, c, d] = plane
# 平面内点点云
iCloud = pcd.select_by_index(ids)
iCloud.paint_uniform_color([0, 0, 1.0])
# 平面外点点云
oCloud = pcd.select_by_index(ids, invert=True)
oCloud.paint_uniform_color([1.0, 0, 0])
# 可视化平面分割结果
o3d.visualization.draw_geometries([iCloud, oCloud])
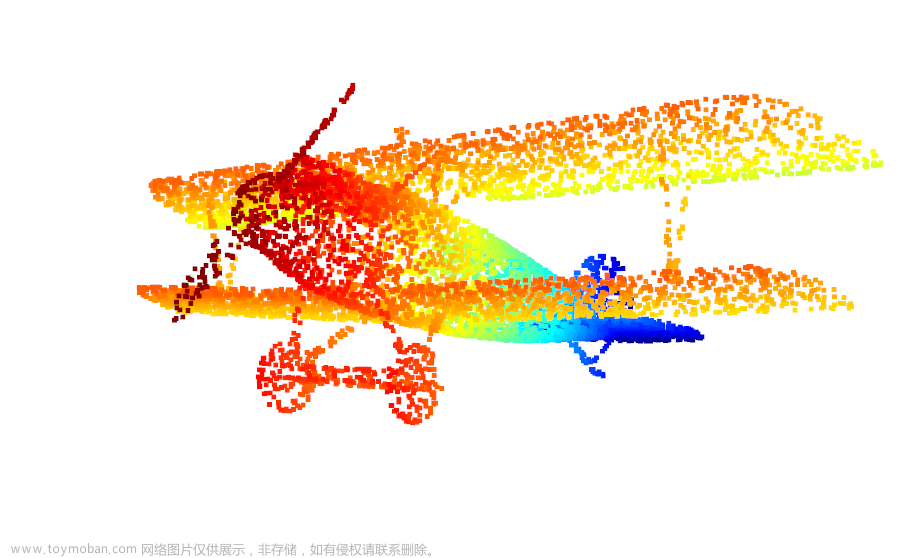
最后得到的结果为
 文章来源:https://www.toymoban.com/news/detail-418330.html
文章来源:https://www.toymoban.com/news/detail-418330.html
本来以为平面会出现在兔子的底座上,没想到会把兔子一分为二。文章来源地址https://www.toymoban.com/news/detail-418330.html
到了这里,关于Open3d点云对象详解的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!