目录
Gazebo安装配置
创建仿真环境
仿真使用
Rviz查看摄像头采集的信息
Kinect仿真
问题解决:
1.gazebo--SpawnModel: Failure - model name mrobot already exists.
Gazebo安装配置
1.设置你的电脑来接收软件
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
2.设置秘钥
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -3.安装Gazebo
sudo apt-get update
sudo apt-get install gazebo11
sudo apt-get install libgazebo11-dev4.检查你的安装是否有效果=
gazebo5.打开 /.gazebo文件夹 下载模型
cd ~/.gazebo
git clone https://github.com/osrf/gazebo_models如果出现fatal连接GitHub失败请使用以下代码
git clone https://gitclone.com/github.com/osrf/gazebo_models下载时间可能偏久,读者可以选择和我一样另起终端进行其他操作,等到需要使用场景模型的时候大概也已经下载完成。
6.其他关联安装包(不定时更新)
sudo apt-get install ros-noetic-rviz
sudo apt-get install ros-noetic-robot-state-publisher
sudo apt-get install ros-noetic-gazebo-ros-pkgs ros-noetic-gazebo-ros-control
sudo apt install ros-noetic-moveit然后运行安装包索引
sudo apt-get update接下来进行机器人模型的搭建
机器人模型配置
首先进入到mbot_description/urdf/xacro下
cd ~/catkin_ws/src/mbot_description/urdf/xacro
mkdir gazebo
cd gazebo
sudo gedit mbot_base_gazebo.xacro编辑模型文件
<?xml version="1.0"?>
<robot name="mbot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<!--存放下面相关定义内容-->
</robot>
<!-- PROPERTY LIST -->
<xacro:property name="M_PI" value="3.1415926"/>
<xacro:property name="base_mass" value="20" />
<xacro:property name="base_radius" value="0.20"/>
<xacro:property name="base_length" value="0.16"/>
<xacro:property name="wheel_mass" value="2" />
<xacro:property name="wheel_radius" value="0.06"/>
<xacro:property name="wheel_length" value="0.025"/>
<xacro:property name="wheel_joint_y" value="0.19"/>
<xacro:property name="wheel_joint_z" value="0.05"/>
<xacro:property name="caster_mass" value="0.5" />
<xacro:property name="caster_radius" value="0.015"/> <!-- wheel_radius - ( base_length/2 - wheel_joint_z) -->
<xacro:property name="caster_joint_x" value="0.18"/>
<!-- Defining the colors used in this robot -->
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
<material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material>
<!-- Macro for inertia matrix -->
<xacro:macro name="sphere_inertial_matrix" params="m r">
<inertial>
<mass value="${m}" />
<inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"
iyy="${2*m*r*r/5}" iyz="0"
izz="${2*m*r*r/5}" />
</inertial>
</xacro:macro>
<xacro:macro name="cylinder_inertial_matrix" params="m r h">
<inertial>
<mass value="${m}" />
<inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"
iyy="${m*(3*r*r+h*h)/12}" iyz = "0"
izz="${m*r*r/2}" />
</inertial>
</xacro:macro>
<!-- Macro for robot wheel -->
<xacro:macro name="wheel" params="prefix reflect">
<joint name="${prefix}_wheel_joint" type="continuous">
<origin xyz="0 ${reflect*wheel_joint_y} ${-wheel_joint_z}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
<material name="gray" />
</visual>
<!-- collision -->
<!-- the same with visual -->
<!--增加惯性属性和碰撞属性-->
<collision>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
</collision>
<!-- inertial -->
<cylinder_inertial_matrix m="${wheel_mass}" r="${wheel_radius}" h="${wheel_length}" />
</link>
<!--添加gazebo标签为各link配颜色 ,gazebo与rivz颜色设置不兼容-->
<!-- Add gazebo tag to link -->
<gazebo reference="${prefix}_wheel_link">
<material>Gazebo/Gray</material>
</gazebo>
<!--joint添加传动装置,用得 transmission 标签,小车轮子用速度控制接口-->
<!-- Transmission is important to link the joints and the controller -->
<transmission name="${prefix}_wheel_joint_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${prefix}_wheel_joint" >
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="${prefix}_wheel_joint_motor">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
<!-- Macro for robot caster -->
<xacro:macro name="caster" params="prefix reflect">
<joint name="${prefix}_caster_joint" type="continuous">
<origin xyz="${reflect*caster_joint_x} 0 ${-(base_length/2 + caster_radius)}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${caster_radius}" />
</geometry>
<material name="black" />
</visual>
<!-- 碰撞属性 -->
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${caster_radius}" />
</geometry>
</collision>
<!-- 惯性属性 -->
<sphere_inertial_matrix m="${caster_mass}" r="${caster_radius}" />
</link>
<!--添加gazebo标签,为各link配颜色-->
<gazebo reference="${prefix}_caster_link">
<material>Gazebo/Black</material>
</gazebo>
</xacro:macro>
<xacro:macro name="mbot_base_gazebo">
<link name="base_footprint">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.001 0.001 0.001" />
</geometry>
</visual>
</link>
<!-- 给 base_footprint 添加标签 -->
<gazebo reference="base_footprint">
<turnGravityOff>false</turnGravityOff>
</gazebo>
<joint name="base_footprint_joint" type="fixed">
<origin xyz="0 0 ${base_length/2 + caster_radius*2}" rpy="0 0 0" />
<parent link="base_footprint"/>
<child link="base_link" />
</joint>
<!--base_link添加碰撞属性和惯性属性-->
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
<material name="yellow" />
</visual>
<collision>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${base_mass}" r="${base_radius}" h="${base_length}" />
</link>
<!--base_link添加gazebo标签-->
<gazebo reference="base_link">
<material>Gazebo/Blue</material>
</gazebo>
<wheel prefix="left" reflect="-1"/> <!-- 调用驱动轮子宏定义 -->
<wheel prefix="right" reflect="1"/> <!-- 调用驱动轮子宏定义 -->
<caster prefix="front" reflect="-1"/> <!--调用支撑轮子宏定义-->
<caster prefix="back" reflect="1"/> <!-- 调用支撑轮子宏定义 -->
</xacro:macro>
<!-- controller -->
<gazebo>
<plugin name="differential_drive_controller"
filename="libgazebo_ros_diff_drive.so"> <!-- gazebo提供得差速控制器插件 -->
<!-- 控制器所需参数 -->
<rosDebugLevel>Debug</rosDebugLevel>
<publishWheelTF>true</publishWheelTF>
<robotNamespace>/</robotNamespace><!-- 机器人命名空间 订阅和发布得话题 前面 会加上命名空间 /说明没有添加-->
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<legacyMode>true</legacyMode>
<leftJoint>left_wheel_joint</leftJoint> <!-- 控制得joint在哪里,必须和上面得joint名称一致 -->
<rightJoint>right_wheel_joint</rightJoint><!-- 控制得joint在哪里,必须和上面得joint名称一致 -->
<wheelSeparation>${wheel_joint_y*2}</wheelSeparation><!-- 两个轮子得间距 -->
<wheelDiameter>${2*wheel_radius}</wheelDiameter>
<broadcastTF>1</broadcastTF>
<wheelTorque>30</wheelTorque>
<wheelAcceleration>1.8</wheelAcceleration>
<commandTopic>cmd_vel</commandTopic> <!-- 订阅得话题:速度控制指令 -->
<odometryFrame>odom</odometryFrame>
<odometryTopic>odom</odometryTopic> <!-- 发布里程计信息 -->
<robotBaseFrame>base_footprint</robotBaseFrame><!-- 设置controler所控制的机器人的坐标系是哪个坐标系 -->
</plugin>
</gazebo>
再编辑mbot_gazebo.xacro
<?xml version="1.0"?>
<robot name="arm" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find mbot_description)/urdf/xacro/gazebo/mbot_base_gazebo.xacro" /> <!-- 包含文件 -->
<mbot_base_gazebo/> <!-- 调用宏定义 -->
</robot>
编辑launch文件
cd ~/catkin_ws/src/mbot_description/launch/xacro
mkdir gazebo
cd gazebo
sudo gedit mbot_base_gazebo.launch
<launch>
<!-- 设置launch文件的参数 -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- 运行gazebo仿真环境 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/gazebo/mbot_gazebo.xacro'" />
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model mrobot -param robot_description"/>
</launch>
配置完成后运行显示模型
roslaunch mbot_description mbot_base_gazebo.launch注意
由于Ubuntu20.04对应的ros版本为noetic,所以xacro模型文件的宏定义和宏调用方式都需要更改
Ubuntu20.04的mbot_base_gazebo.xacro文件对应的内容如下
<?xml version="1.0"?>
<robot name="mbot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<!-- PROPERTY LIST -->
<xacro:property name="M_PI" value="3.1415926"/>
<xacro:property name="base_mass" value="20" />
<xacro:property name="base_radius" value="0.20"/>
<xacro:property name="base_length" value="0.16"/>
<xacro:property name="wheel_mass" value="2" />
<xacro:property name="wheel_radius" value="0.06"/>
<xacro:property name="wheel_length" value="0.025"/>
<xacro:property name="wheel_joint_y" value="0.19"/>
<xacro:property name="wheel_joint_z" value="0.05"/>
<xacro:property name="caster_mass" value="0.5" />
<xacro:property name="caster_radius" value="0.015"/> <!-- wheel_radius - ( base_length/2 - wheel_joint_z) -->
<xacro:property name="caster_joint_x" value="0.18"/>
<!-- Defining the colors used in this robot -->
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
<material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material>
<!-- Macro for inertia matrix -->
<xacro:macro name="sphere_inertial_matrix" params="m r">
<inertial>
<mass value="${m}" />
<inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"
iyy="${2*m*r*r/5}" iyz="0"
izz="${2*m*r*r/5}" />
</inertial>
</xacro:macro>
<xacro:macro name="cylinder_inertial_matrix" params="m r h">
<inertial>
<mass value="${m}" />
<inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"
iyy="${m*(3*r*r+h*h)/12}" iyz = "0"
izz="${m*r*r/2}" />
</inertial>
</xacro:macro>
<!-- Macro for robot wheel -->
<xacro:macro name="wheel" params="prefix reflect">
<joint name="${prefix}_wheel_joint" type="continuous">
<origin xyz="0 ${reflect*wheel_joint_y} ${-wheel_joint_z}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
<material name="gray" />
</visual>
<collision>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
</collision>
<xacro:cylinder_inertial_matrix m="${wheel_mass}" r="${wheel_radius}" h="${wheel_length}" />
</link>
<gazebo reference="${prefix}_wheel_link">
<material>Gazebo/Gray</material>
</gazebo>
<!-- Transmission is important to link the joints and the controller -->
<transmission name="${prefix}_wheel_joint_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${prefix}_wheel_joint" >
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="${prefix}_wheel_joint_motor">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
<!-- Macro for robot caster -->
<xacro:macro name="caster" params="prefix reflect">
<joint name="${prefix}_caster_joint" type="continuous">
<origin xyz="${reflect*caster_joint_x} 0 ${-(base_length/2 + caster_radius)}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${caster_radius}" />
</geometry>
<material name="black" />
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${caster_radius}" />
</geometry>
</collision>
<xacro:sphere_inertial_matrix m="${caster_mass}" r="${caster_radius}" />
</link>
<gazebo reference="${prefix}_caster_link">
<material>Gazebo/Black</material>
</gazebo>
</xacro:macro>
<xacro:macro name="mbot_base_gazebo">
<link name="base_footprint">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.001 0.001 0.001" />
</geometry>
</visual>
</link>
<gazebo reference="base_footprint">
<turnGravityOff>false</turnGravityOff>
</gazebo>
<joint name="base_footprint_joint" type="fixed">
<origin xyz="0 0 ${base_length/2 + caster_radius*2}" rpy="0 0 0" />
<parent link="base_footprint"/>
<child link="base_link" />
</joint>
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
<material name="yellow" />
</visual>
<collision>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
</collision>
<xacro:cylinder_inertial_matrix m="${base_mass}" r="${base_radius}" h="${base_length}" />
</link>
<gazebo reference="base_link">
<material>Gazebo/Blue</material>
</gazebo>
<xacro:wheel prefix="left" reflect="-1"/>
<xacro:wheel prefix="right" reflect="1"/>
<xacro:caster prefix="front" reflect="-1"/>
<xacro:caster prefix="back" reflect="1"/>
<!-- controller -->
<gazebo>
<plugin name="differential_drive_controller"
filename="libgazebo_ros_diff_drive.so">
<rosDebugLevel>Debug</rosDebugLevel>
<publishWheelTF>true</publishWheelTF>
<robotNamespace>/</robotNamespace>
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<legacyMode>true</legacyMode>
<leftJoint>left_wheel_joint</leftJoint>
<rightJoint>right_wheel_joint</rightJoint>
<wheelSeparation>${wheel_joint_y*2}</wheelSeparation>
<wheelDiameter>${2*wheel_radius}</wheelDiameter>
<broadcastTF>1</broadcastTF>
<wheelTorque>30</wheelTorque>
<wheelAcceleration>1.8</wheelAcceleration>
<commandTopic>cmd_vel</commandTopic>
<odometryFrame>odom</odometryFrame>
<odometryTopic>odom</odometryTopic>
<robotBaseFrame>base_footprint</robotBaseFrame>
</plugin>
</gazebo>
</xacro:macro>
</robot>需要更改的地方为

在轮子的宏定义语法以及支撑轮的宏定义语法前添加xacro引用
cylinder_inertial_matrix,
sphere_inertial_matrix
两个个标签引用的时候也需要加上xacro引用


以及mbot_gazebo.xacro文件也需要更改宏定义
<?xml version="1.0"?>
<robot name="arm" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find mbot_description)/urdf/xacro/gazebo/mbot_base_gazebo.xacro" /> <!-- 包含文件 -->
<xacro:mbot_base_gazebo/> <!-- 调用宏定义 -->
</robot>
launch文件同样需要更改,这里有三个更改方法,一般情况下将
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/gazebo/mbot_gazebo.xacro'" />
改为xacro 即可
也有其他的解决方法例如将其改为
xacro --i
还有
xacro.py
<launch>
<!-- 设置launch文件的参数 -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- 运行gazebo仿真环境 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro '$(find mbot_description)/urdf/xacro/gazebo/mbot_gazebo.xacro'" />
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model mrobot -param robot_description"/>
</launch>
正常启动后如下所示

创建仿真环境
这里有两种方法添加场景模型
第一:直接添加
将模型放置到~/.gazebo/models 文件夹下——在gazebo的左侧列表点击“insert”(可以看到里面有很多的模型,我们只需要从列表中拖出我们需要的模型放置到仿真环境中就可以)
https://bitbucket.org/osrf/gazebo_models/downloads/
这里本文开始时的下载如果已经下载完成可以跳过,如果还未下载完成请等待下载完成再进行后续操作。

选择需要的模型直接拖动到场景中搭建即可

注意这一步需要将原本的机器人模型进行删除然后保存。

这里如果显示conectting----说明还未连接完成,等待出现http-----连接完成后即可正常显示模型,再选择需要的模型添加即可。

自定义文件名称和位置即可
建议存放在catkin_ws/src/mbot_descritpion/worlds下

第二:使用Building editor
模型创建:
Edit——Building editor——绘制环境模型——File——Save保存我们的模型文件(自己设置模型文件名字)——Exit Building Editor(退出编辑界面),可以看到我们的仿真环境已经在gazebo中显示;
保存环境模型同第一种方法一致,然后关闭gazebo界面即可。
仿真使用
<!-- 设置launch文件的参数 -->
<arg name="world_name" value="$(find mbot_description)/worlds/Ambulance.world"/><!-- 要加入的部分 -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
传感器仿真
cd ~/catkin_ws/src/mbot_description/urdf/xacro
mkdir sensors
cd sensors
sudo gedit camera_gazebo.xacro
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="camera">
<xacro:macro name="usb_camera" params="prefix:=camera">
<link name="${prefix}_link">
<inertial>
<mass value="0.1" />
<origin xyz="0 0 0" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0"
iyy="0.01" iyz="0.0"
izz="0.01" />
</inertial>
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<box size="0.01 0.04 0.04" />
</geometry>
<material name="black"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
<geometry>
<box size="0.01 0.04 0.04" />
</geometry>
</collision>
</link>
<gazebo reference="${prefix}_link">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="${prefix}_link"> <!-- 这个sensor代表的link -->
<sensor type="camera" name="camera_node">
<update_rate>30.0</update_rate><!-- 摄像头发布频率 -->
<camera name="head">
<horizontal_fov>1.3962634</horizontal_fov><!-- 摄像头可视范围 -->
<image>
<width>1280</width><!-- 摄像头分辨率 -->
<height>720</height><!-- 摄像头分辨率 -->
<format>R8G8B8</format><!-- 摄像头数据格式 -->
</image>
<clip>
<near>0.02</near><!-- 最近距离 -->
<far>300</far><!-- 最远距离 -->
</clip>
<noise>
<type>gaussian</type><!-- 摄像头高斯噪声 -->
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<plugin name="gazebo_camera" filename="libgazebo_ros_camera.so"><!-- 加载插件,实现摄像头功能 -->
<alwaysOn>true</alwaysOn>
<updateRate>0.0</updateRate>
<cameraName>/camera</cameraName><!-- 命名空间 -->
<imageTopicName>image_raw</imageTopicName><!-- 发布图片信息话题名称 -->
<cameraInfoTopicName>camera_info</cameraInfoTopicName><!-- 发布摄像头信息话题名称 -->
<frameName>camera_link</frameName><!-- 数据的坐标系统 -->
<hackBaseline>0.07</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
</robot>
cd ~/catkin_ws/src/mbot_description/urdf/xacro/gazebo
sudo gedit mbot_with_camera_gazebo.xacro
在文件中写入以下内容即可
<?xml version="1.0"?>
<robot name="arm" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find mbot_description)/urdf/xacro/gazebo/mbot_base_gazebo.xacro" />
<xacro:include filename="$(find mbot_description)/urdf/xacro/sensors/camera_gazebo.xacro" />
<xacro:property name="camera_offset_x" value="0.17" />
<xacro:property name="camera_offset_y" value="0" />
<xacro:property name="camera_offset_z" value="0.10" />
<mbot_base/>
<!-- Camera -->
<joint name="camera_joint" type="fixed">
<origin xyz="${camera_offset_x} ${camera_offset_y} ${camera_offset_z}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="camera_link"/>
</joint>
<xacro:usb_camera prefix="camera"/>
<xacro:mbot_base_gazebo/>
</robot>带摄像头的机器人launch启动文件的编写
cd ~/catkin_ws/src/mbot_description/launch/xacro/gazebo
sudo gedit view_mbot_with_camera_gazebo.launch<launch>
<arg name="world_name" value="$(find mbot_description)/worlds/Ambulance.world"/>
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(arg world_name)" />
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<param name="robot_description" command="$(find xacro)/xacro '$(find mbot_description)/urdf/xacro/gazebo/mbot_with_camera_gazebo.xacro'" />
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model mrobot -param robot_description"/>
</launch>
然后运行显示模型
roslaunch mbot_description view_mbot_with_camera_gazebo.launch

注意如果说出现
[ERROR] [1666006852.591762, 106.467000]: Spawn service failed. Exiting.
[urdf_spawner-6] process has died [pid 35261, exit code 1, cmd /opt/ros/noetic/lib/gazebo_ros/spawn_model -urdf -model mrobot -param robot_description __name:=urdf_spawner __log:=/home/q/.ros/log/89f24a6e-4e10-11ed-b861-1f202bd9bc85/urdf_spawner-6.log].
log file: /home/q/.ros/log/89f24a6e-4e10-11ed-b861-1f202bd9bc85/urdf_spawner-6*.log
则说明gazebo进程关闭不完全,需要将所有gazebo进程关闭
killall gzserver然后发现可以正常启动
使用qt可视化工具查看摄像头画面显示
另起终端
rqt_image_view
注意摄像头参数选定

启用键盘控制
roslaunch mbot_teleop mbot_teleop.launch

注意键盘控制按键

这里如果报错无法定位python 软件包
需要进行下载配置python插件
sudo ln -s /usr/bin/python3 /usr/bin/python
然后再允许键盘控制节点即可
如果读者功能包的src目录下没有mbot_teleop功能包,也可下载另键盘控制功能包
cd ~/carkin_ws/src
git clone https://github.com/ros-teleop/teleop_twist_keyboard.git
//然后启用即可
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
注意该teleop_twist_keyboard.py需要更改为可执行的文件
如果不想使用该功能包,想知道如何自主创建mbot_teleop功能包可参考Arbotix+rviz那篇文章mbot_teleop 功能包创建方法
Rviz查看摄像头采集的信息
rosrun rviz rviz

首先固定框架(fixed frame)选择base_footprint
然后Add——robotmodel——ok
然后Add——image——ok
然后image——image topic——/camera/image_raw

激光雷达仿真
cd ~/catkin_ws/src/mbot_description/urdf/xacro/sensors
sudo gedit lidar_gazebo.xacro
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="laser">
<xacro:macro name="rplidar" params="prefix">
<!-- Create laser reference frame -->
<link name="${prefix}_link">
<inertial>
<mass value="0.1" />
<origin xyz="0 0 0" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0"
iyy="0.01" iyz="0.0"
izz="0.01" />
</inertial>
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<material name="black"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
<geometry>
<cylinder length="0.06" radius="0.05"/>
</geometry>
</collision>
</link>
<gazebo reference="${prefix}_link">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="${prefix}_link">
<sensor type="ray" name="rplidar">
<pose>0 0 0 0 0 0</pose>
<visualize>false</visualize>
<update_rate>5.5</update_rate>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1</resolution>
<min_angle>-3</min_angle>
<max_angle>3</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>6.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="gazebo_rplidar" filename="libgazebo_ros_laser.so">
<topicName>/scan</topicName>
<frameName>laser_link</frameName>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
</robot>
然后编写主体xacro文件
cd ~/catkin_ws/src/mbot_description/urdf/xacro/gazebo
sudo gedit mbot_with_laser_gazebo.xacro内容如下所示
<?xml version="1.0"?>
<robot name="arm" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find mbot_description)/urdf/xacro/gazebo/mbot_base_gazebo.xacro" />
<xacro:include filename="$(find mbot_description)/urdf/xacro/sensors/lidar_gazebo.xacro" />
<xacro:property name="lidar_offset_x" value="0" />
<xacro:property name="lidar_offset_y" value="0" />
<xacro:property name="lidar_offset_z" value="0.105" />
<!-- lidar -->
<joint name="lidar_joint" type="fixed">
<origin xyz="${lidar_offset_x} ${lidar_offset_y} ${lidar_offset_z}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="laser_link"/>
</joint>
<xacro:rplidar prefix="laser"/>
<xacro:mbot_base_gazebo/>
</robot>
然后编写launch 启动文件
cd ~/catkin_ws/src/mbot_description/launch/xacro/gazebo
sudo gedit view_mbot_with_laser_gazebo.launch
<launch>
<arg name="world_name" value="$(find mbot_description)/worlds/Ambulance.world"/>
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(arg world_name)" />
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<param name="robot_description" command="$(find xacro)/xacro '$(find mbot_description)/urdf/xacro/gazebo/mbot_with_laser_gazebo.xacro'" />
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model mrobot -param robot_description"/>
</launch>
激光雷达正常显示
然后启用键盘控制
roslaunch mbot_teleop mbot_teleop.launch 
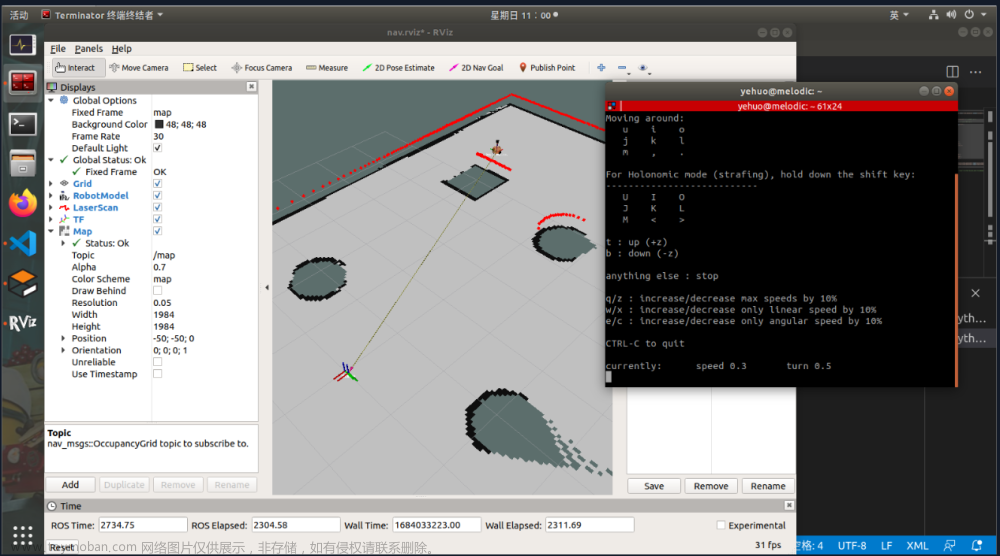
rviz查看雷达采集信息
rosrun rviz rviz需要注意的地方与刚才类似
首先固定框架(fixed frame)选择base_footprint
然后Add——robotmodel——ok

然后Add——laserscan——ok
然后laserscan——topic——scan
在图中的红色线条即为雷达检测到的障碍物,由于我的小车卡在消防车和救护车之间懒得动了,就不附图说明了,红色线条很淡,建议将小车周围拿障碍物包满。
Kinect仿真
方法跟上面摄像头和激光雷达实现的方法类似,这里就不多加说明了,直接给出结果显示了。
gazebo显示
cd ~/catkin_ws/src/mbot_description/urdf/xacro/sensors
sudo gedit kinect_gazebo.xacro<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="kinect_camera">
<xacro:macro name="kinect_camera" params="prefix:=camera">
<!-- Create kinect reference frame -->
<!-- Add mesh for kinect -->
<link name="${prefix}_link">
<origin xyz="0 0 0" rpy="0 0 0"/>
<visual>
<origin xyz="0 0 0" rpy="0 0 ${M_PI/2}"/>
<geometry>
<mesh filename="package://mbot_description/meshes/kinect.dae" />
</geometry>
</visual>
<collision>
<geometry>
<box size="0.07 0.3 0.09"/>
</geometry>
</collision>
</link>
<joint name="${prefix}_optical_joint" type="fixed">
<origin xyz="0 0 0" rpy="-1.5708 0 -1.5708"/>
<parent link="${prefix}_link"/>
<child link="${prefix}_frame_optical"/>
</joint>
<link name="${prefix}_frame_optical"/>
<gazebo reference="${prefix}_link">
<sensor type="depth" name="${prefix}">
<always_on>true</always_on>
<update_rate>20.0</update_rate>
<camera>
<horizontal_fov>${60.0*M_PI/180.0}</horizontal_fov>
<image>
<format>R8G8B8</format>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.05</near>
<far>8.0</far>
</clip>
</camera>
<plugin name="kinect_${prefix}_controller" filename="libgazebo_ros_openni_kinect.so">
<cameraName>${prefix}</cameraName>
<alwaysOn>true</alwaysOn>
<updateRate>10</updateRate>
<imageTopicName>rgb/image_raw</imageTopicName>
<depthImageTopicName>depth/image_raw</depthImageTopicName>
<pointCloudTopicName>depth/points</pointCloudTopicName>
<cameraInfoTopicName>rgb/camera_info</cameraInfoTopicName>
<depthImageCameraInfoTopicName>depth/camera_info</depthImageCameraInfoTopicName>
<frameName>${prefix}_frame_optical</frameName>
<baseline>0.1</baseline>
<distortion_k1>0.0</distortion_k1>
<distortion_k2>0.0</distortion_k2>
<distortion_k3>0.0</distortion_k3>
<distortion_t1>0.0</distortion_t1>
<distortion_t2>0.0</distortion_t2>
<pointCloudCutoff>0.4</pointCloudCutoff>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
</robot>然后编写主体xacro文件
cd ~/catkin_ws/src/mbot_desctiption/urdf/xacro/gazebo
sudo gedit mbot_with_kinect_gazebo.xacro<?xml version="1.0"?>
<robot name="arm" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find mbot_description)/urdf/xacro/gazebo/mbot_base_gazebo.xacro" />
<xacro:include filename="$(find mbot_description)/urdf/xacro/sensors/kinect_gazebo.xacro" />
<xacro:property name="kinect_offset_x" value="0.15" />
<xacro:property name="kinect_offset_y" value="0" />
<xacro:property name="kinect_offset_z" value="0.11" />
<mbot_base/>
<!-- kinect -->
<joint name="kinect_joint" type="fixed">
<origin xyz="${kinect_offset_x} ${kinect_offset_y} ${kinect_offset_z}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="kinect_link"/>
</joint>
<xacro:kinect_camera prefix="kinect"/>
<xacro:mbot_base_gazebo/>
</robot>然后编写launch 启动文件
cd ~/catkin_ws/src/mbot_description/launch/xacro/gazebo
sudo gedit view_mbot_with_kinect_gazebo.launch<launch>
<!-- 设置launch文件的参数 -->
<arg name="world_name" value="$(find mbot_description)/worlds/Ambulance.world"/><!-- 设置仿真环境文件路径 -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- 运行gazebo仿真环境 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(arg world_name)" />
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro '$(find mbot_description)/urdf/xacro/gazebo/mbot_with_kinect_gazebo.xacro'" /> <!-- 设置机器人模型文件路径 -->
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model mrobot -param robot_description"/>
</launch>
运行后如下所示

查看kinect采集到的信息
rosrun rviz rviz 
注意:
首先固定框架(fixed frame)选择base_footprint
然后Add——robotmodel——ok
然后Add——pointcloud2——ok
然后pointcloud2——topic——/kinect/depth/points
以上就是本节内容,关于Gazebo物理仿真平台搭建已经全部完成。
问题解决:
1.gazebo--SpawnModel: Failure - model name mrobot already exists.
roslaunch gazebo_ros empty_world.launch在开启后的gazebo界面中选中mrobot模型delete删除即可
然后退出。
在上述模型创建且.world 保存前需要把机器人模型删除再保存,不然会出现模型重名报错。
2. [ERROR] [1666006852.591762, 106.467000]: Spawn service failed. Exiting.
[urdf_spawner-6] process has died [pid 35261, exit code 1, cmd /opt/ros/noetic/lib/gazebo_ros/spawn_model -urdf -model mrobot -param robot_description __name:=urdf_spawner __log:=/home/q/.ros/log/89f24a6e-4e10-11ed-b861-1f202bd9bc85/urdf_spawner-6.log].
log file: /home/q/.ros/log/89f24a6e-4e10-11ed-b861-1f202bd9bc85/urdf_spawner-6*.log文章来源:https://www.toymoban.com/news/detail-418429.html
将所有gazebo进程关闭再重启即可文章来源地址https://www.toymoban.com/news/detail-418429.html
killall gzserver到了这里,关于Gazebo——仿真平台搭建(基于Ubuntu20.04) 1.gazebo--SpawnModel: Failure - model name mrobot already exists.的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!