概述:
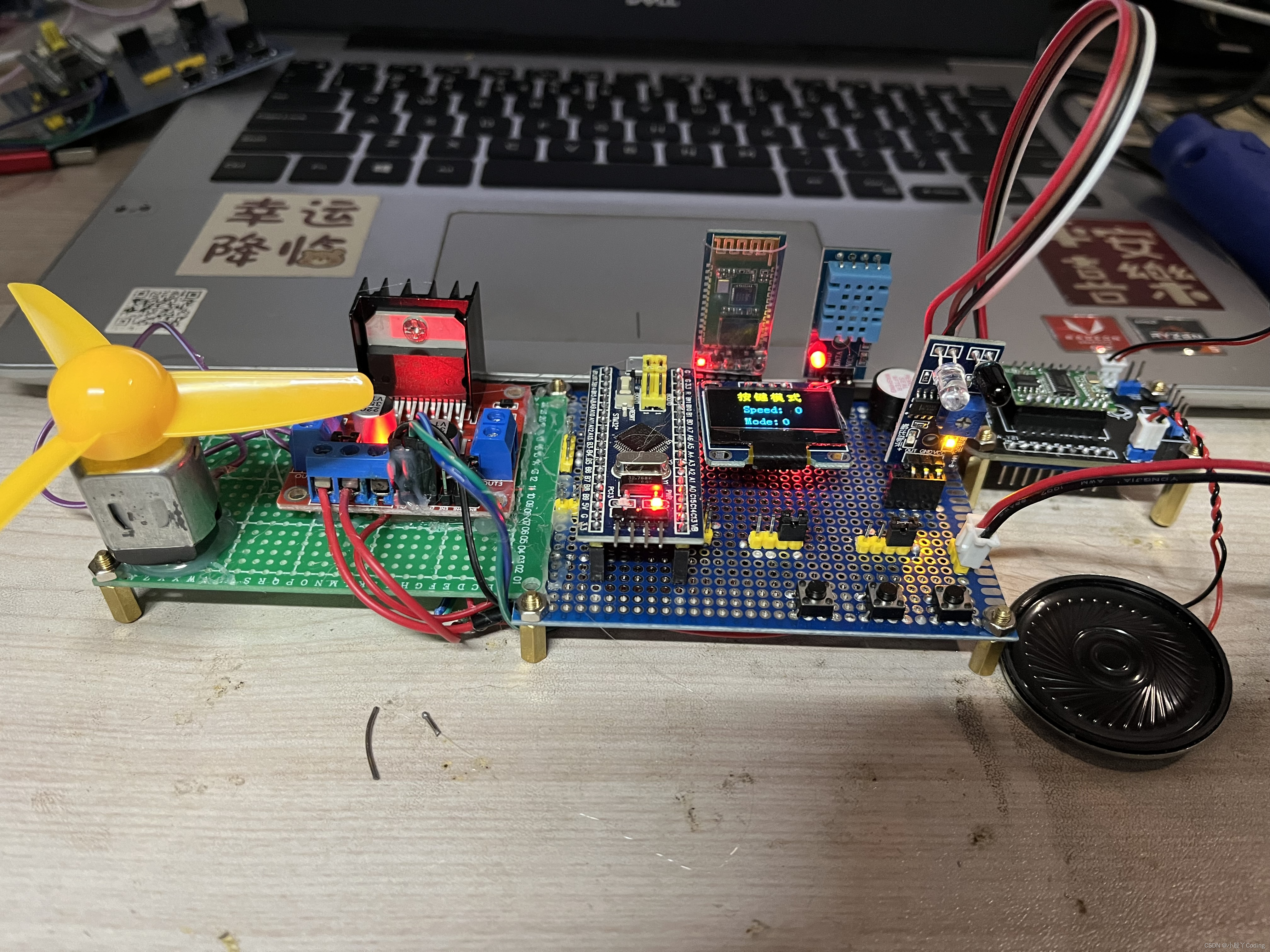
本项目基于 正点原子精英(stm32f103zet6) 控制小舵机 模拟 二轴机器人逆运动学控制。
目录
概述:
1. 我的问题总结
2.stm32控制部分 与机械部分
2.1 对于二轴机器人设计
2.2 stm32 输出 pwm
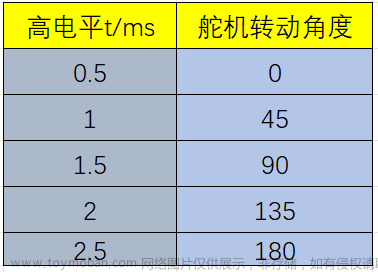
2.3 舵机控制
3.正运动学
3.1 D-H建模下对姿态的描述
4.逆运动学
4.1 几何解法
4.2 代数解法
4.3 多重解下的选择方式
5.线性运动的展示
1. 我的问题总结
1. 舵机的运动范围有限仅仅为(0°-180°)。
2. 定时器给舵机的PWM为整数 (即TIMX->CRR需要是整数)导致机械臂走直线容易是锯齿 状。
3. 如何在多重解下选择(知道原理,不知道如何操作)。
2.stm32控制部分 与机械部分

2.1 对于二轴机器人设计
为了便于计算和验证让 l1和l2均等于100mm 让二轴机械臂绕Z轴主动建立坐标系。

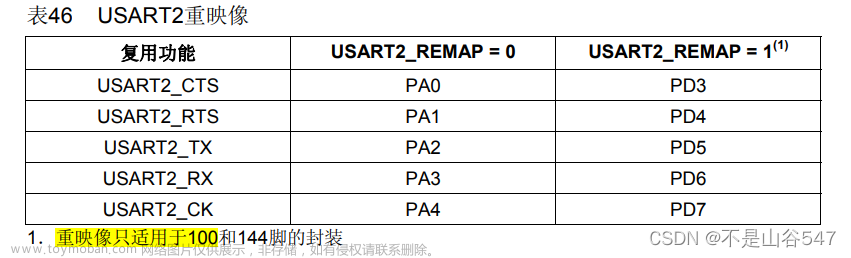
2.2 stm32 输出 pwm
我用了TIM3的OC2和OC3通道输出两种PWM输出。
//arr:自动重装值
//psc:时钟预分频数
void TIM3_PWM_Init(u16 arr,u16 psc){
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCInitTypeDef TIM_OC3InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIOB和AFIO复用功能模块时钟
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5 TIM3_CH3->PB0
//设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
//设置该引脚为复用输出功能,输出TIM3 CH1的PWM脉冲波形 GPIOB.0
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //TIM_CH1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
//初始化TIM3 Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
//初始化TIM3 Channel3 PWM模式
TIM_OC3InitStructure.TIM_OCMode = TIM_OCMode_PWM1; //定时器模式:TIM脉冲宽度调制模式1
TIM_OC3InitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OC3InitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//输出极性:TIM输出比较极性高
TIM_OC3Init(TIM3, &TIM_OC3InitStructure); //根据T指定的参数初始化外设TIM3 OC1
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIM3
}
TIM_SetCompare3(TIM3,500);
TIM_SetCompare2(TIM3,500);
则可以控制TM3通道3和通道2的的PWM输出。
2.3 舵机控制
因为部分重映射了所以PWM输出的是OC2 ~ PB5 OC3 ~ PB0
void Servos_Setang(u8 servos, uint16_t ang){
if(ang < 0) ang = 0;
if(ang > 180) ang = 180;
if(servos == 1){
TIM_SetCompare3(TIM3,500 + 14*ang);
}
else if(servos == 2){
TIM_SetCompare2(TIM3,500 + 14*ang);
}
}3.正运动学
3.1 D-H建模下对姿态的描述
普通的姿态描述:

在变换矩阵下通过4个值分别建立连杆n-1与n之间的关系:
1. 绕Xn-1轴转αn-1角
2. 沿Xn-1轴移动an-1
3. 绕 Zn 轴旋转本θn角
4. 沿 Zn 轴移动dn
带入以下公式:

将得到的位姿矩阵从下往上相乘即为末端位姿
例如 0T3 = 0T1*1T2*2T3
4.逆运动学
机器人逆运动学:又称机器人运动学方程的逆解或间接位置求解,指给定机器人抹点执行器的位置和姿态,求解可到达给定位置和姿态的各关节的角度值。
4.1 几何解法

4.2 代数解法

4.3 多重解下的选择方式

如何选择离当前状态更近
更快
更节能的解

如何可以选择性避开障碍的解
5.线性运动的展示
轨迹成直线(细分可看出成锯齿状带优化)
直线运动视频文章来源:https://www.toymoban.com/news/detail-419592.html
文章来源地址https://www.toymoban.com/news/detail-419592.html
到了这里,关于基于STM32F103控制舵机 仿真 简单二轴机器人逆运动学(20220615完成 正在处理三轴)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!