这篇文章主要整理一下前段时间学习的轨迹规划算法,关于轨迹规划问题可以查到的相关资料很多,但能把轨迹规划问题详细说清楚的并不太多,这导致我在学习过程中出现很多疑惑。这里我把Apollo的各个版本轨迹规划算法进行简单总结和汇总。
主要参考资料:
1.b站大佬详细视频教程https://space.bilibili.com/287989852?spm_id_from=333.337.0.0
相关记录https://blog.csdn.net/zheshui69163?type=blog
2.https://blog.csdn.net/qq_23981335/article/details/121507369
3.https://blog.csdn.net/IHTY_NUI/article/details/113704591
4.https://zhuanlan.zhihu.com/p/444159631
5.https://www.cnblogs.com/liuzubing/p/11051390.html
6.https://blog.csdn.net/ChenGuiGan/article/details/122253193
7.https://github.com/Strange-AI/frenet_path_planning
8.https://github.com/ChenBohan/Robotics-Path-Planning-04-Quintic-Polynomial-Solver
9.https://www.cnblogs.com/kin-zhang/p/15532655.html
10.《Baidu Apollo EM Motion Planner》
1.背景
1.1轨迹规划方法综述
参见https://blog.csdn.net/IHTY_NUI/article/details/113704591
本文所指轨迹规划是局部规划,对应其中的2.2和2.3节。
1.2轨迹规划主要策略
主要可以分为两种:
1.迭代优化方法,速度-路径解耦规划(即横纵向解耦规划,横向规划决定轨迹形状,纵向规划决定速度状态,两者均凸才是凸优化)
迭代优化算法过程包括交规决策、路径决策、路径优化、 速度决策、速度优化。
决策:为了限定非凸问题的解空间,通过决策的方法将问题转换为凸优化问题。包括路径决策和速度决策。
2.规划
2.SLT三维优化方法(时空联合规划算法)
如果采用时空联合规划算法,需要将时空联合决策结果提炼为凸可行域,求解复杂。目前业界广泛采用时空分离规划的自动驾驶方案,道路应变能力有限,容易造成急刹等不佳体验,轻舟依托时空联合规划,成为中国首家采用时空联合规划的自动驾驶公司。
总体来说,速度-路径解耦规划是目前主流的轨迹规划方法。本文主要针对解耦规划的方法
1.3一些重要的基础知识
1.3.1参考线
Frenet坐标系和大地坐标系的转换:很基础,没什么好说的
https://blog.csdn.net/zheshui69163/article/details/125963160
1.3.2五次多项式在规划问题中的重要性
离散的点一般用五次多项式来连接,这是因为:
首先,加速度变化率最小,即jerk最小化时,舒适性最高
Takahashi等人已经证明:任何Jerk最优化问题的解都可以用一个5次多项式来表示。
https://zhuanlan.zhihu.com/p/444159631
https://blog.csdn.net/zheshui69163/article/details/125841525
1.3.3轻决策和重决策
b站老王的视频里讲得非常清楚
https://blog.csdn.net/zheshui69163/article/details/126141171
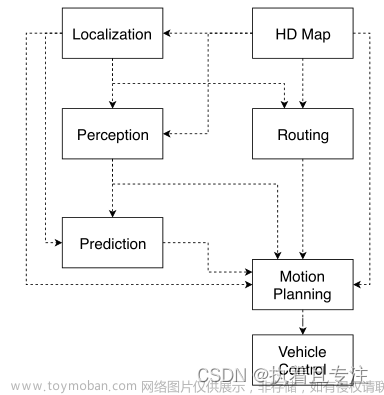
Apollo各个版本轨迹规划
1.Apollo 1.5----Apollo3.0:EM planner,DP(动态规划)+QP(二次规划),轻决策
这里需要注意的是:DP(动态规划)不是规划,是用于决策的
2.Apollo2.5:增加LatticePlanner
3.Apollo 3.5:重决策,DP+QP的最后一个版本,DP最后的尝试
4.Apollo 5.0----Apollo7.0:取消路径DP,保留速度DP,采用重决策,改为Public Road Planner
未来研究方向:规则兜底,深度学习决策
路径DP在最新版本中被取消,这是因为过多的场景下,每个场景需要使用不同的规划参数,失去了轻决策的最大优势,但是,了解DP+QP的算法对于我们学习轨迹规划仍然十分重要。
2.算法具体内容
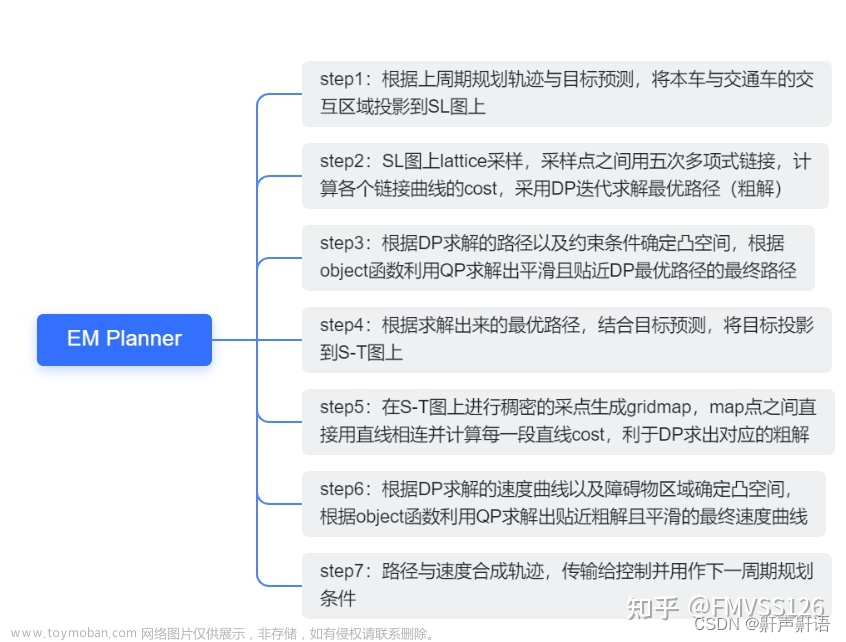
1. EM Planner


具体步骤:






难点
如何将cost函数转换为QP公式
https://blog.csdn.net/qq_23981335/article/details/121507369
https://www.cnblogs.com/kin-zhang/p/15532655.html
2. Lattice Planner
Lattice规划过程相对简单,只需要采样轨迹末状态就可以生成一系列候选轨迹簇,然后根据cost function来选取最优。
Step1:初始状态已知,采样轨迹末状态。
Step2:横纵向采样,分别用五次多项式进行拟合。
Step3:遍历横纵向SL、ST曲线,组合成候选轨迹簇。
Step4:计算每条轨迹的cost,选取最优轨迹。文章来源:https://www.toymoban.com/news/detail-420046.html
基于采样方法的路径规划代码,亲测有效https://github.com/ChenBohan/Robotics-Path-Planning-04-Quintic-Polynomial-Solver文章来源地址https://www.toymoban.com/news/detail-420046.html
到了这里,关于Apollo 轨迹规划算法解析的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!