功能需求:
主机使用一个串口,与两个从机进行双向通信,主机向从机发送数据,从机能够返回数据,由于结构限制,主机与从机之间只有3根线(电源、地、数据线),并且从机上没有设物理的电源开关,需要通过与主机连接的数据线来控制开机,总结如下:
1、数据线只有1根
2、能够双向通信
3、主机能够控制从机开机
4、主机可以单独向1个从机发数据,也可以同时向两个从机发送数据
根据需求,设计出如下电路:
工作原理分析:
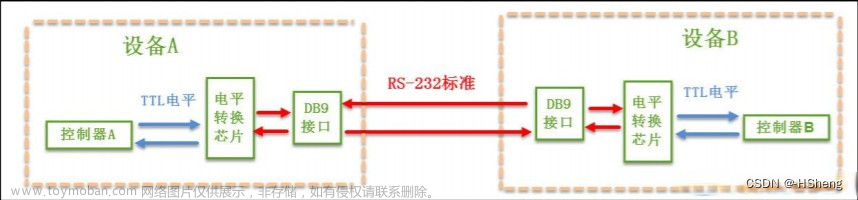
VCC_24V_IN 、GND、LINE_L(LINE_R)三根线接线连接到从机,电源开启电路是从机内部的电源控制。
开机的逻辑:*
主机先上电,LINE_L因为主机的R1上拉而有高电平,使Q6导通,Q5的G极电压被拉低而导通,VCC_24V电压向从机供电,从机MCU启动后,将PWR_EN拉高,维持电源导通。
关机的连逻辑:
从机MCU将PWR_EN拉低,Q7截止,当主机关机后,LINE_L没有电压,Q6截止,Q5的G极电压变高而截止,从机断电。
主机向从机发送数据:
主机的UART_TX脚输出低电平时,D2\D3二极管是正向导通,将L_RX拉低,输出高电平时,D2\D3二极管是反向截止,L_RX保持高电平,实现了主机向从机发送数据;而L_TX因为D1的隔离,保持电平不变;UART_RX会则通过D4又收到了TX发来的数据,因此在发送数据时,软件要把RX功能先失能。
工作条件:1、主机的TX_EN1为低电平,Q2截止;2、RX接收失能;3、从机的TX失能;
从机向主机发送数据:
从机的TX发送数据,与主机的发送工作原理相同。
因为数据线只有一根,为了保证数据信号不冲突,需要如下约定。
1、总是由主机先发送数据,从机一直处于接收状态,在收到主机的数据后,将RX接收失能,使能TX,切换为发送状态,向主机发完数据后,又切换为接收状态。
2、因为主机的TX\RX都是一根线分到两个从机,两个从机会同时收到数据,因此必须约定从机发数据的先后顺序,否则主机收到的数据会出错。
3、主机可以通过拉高TX_EN1脚,使LINE_L电压变低,从机就收不到数据。
4、因为二极管会产生压降,为了保证MCU能正确识别到高低电平,需选用0.3V压降的二极管,两个二极管加起来压降小于0.7V文章来源:https://www.toymoban.com/news/detail-420902.html
此电路不需要用到多路选择芯片,线路简洁元件少成本低。
----------------文档结束-----------------文章来源地址https://www.toymoban.com/news/detail-420902.html
到了这里,关于1个串口用1根线实现多机半双工通信+开机控制电路的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!