软件工程:数据流图,智能汽车代码功能实现
软件工程
简介

开闭原则
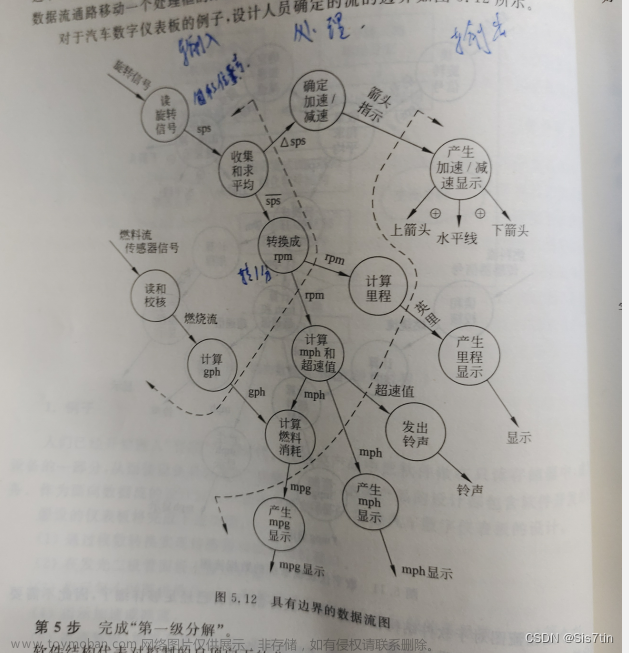
软件实现应该对扩展开放,对修改关闭,其含义是说一个软件实体应该通过扩展来实现变化,而不是通过修改已有的代码来实现变化的
智能汽车中,确定汽车的加速/减速
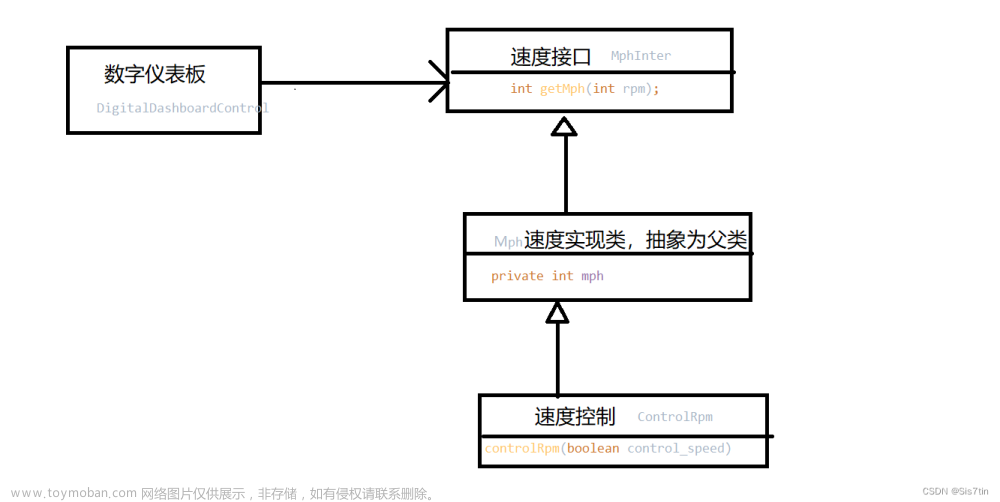
速度接口
//速度接口
public interface MphInter {
String getMph(int rpm);
}
速度实现抽象为父类
//1.速度实现类,抽象为父类
public abstract class Mph implements MphInter {
//2.将转速转化为速度
@Override
public abstract String getMph(int rpm);
}
速度控制,子类ControlRpm继承抽象父类
public class ControlRpm extends Mph {
//1.定义速度mph
private int mph;
//2.重写父类方法
@Override
public String getMph(int rpm) {
/*3.通过传入参数rpm,
经过一系列计算得到了速度mph
...
...
*/
//4.比如最后获得到的速度mgh为90迈
mph = 90;
//5.这里为了简化逻辑,直接设为加速装填,本来应该和前一个速度相比来判断加速还是减速
boolean control_speed = true;
if (control_speed == true) {
return "+" + mph;
} else {
return "-" + mph;
}
}
public int getMph() {
return mph;
}
}
如果不使用开闭原则,将速度控制方法写于速度实现类中
public class Mph implements MphInter {
//1.定义速度mph
private int mph;
//2.将转速转化为速度
@Override
public int getMph(int rpm) {
/*4.通过传入参数rpm,
经过一系列计算得到了速度mph
...
...
*/
//5.比如最后获得到的速度mgh为90迈
mph = 90;
return mph;
}
public ControlRpm() {
}
public String controlRpm(boolean control_speed){
if(control_speed == true){
return "+";
}else{
return "-";
}
}
}
那么后续,如果出现其他需求,比如将速度控制换成 ↑和↓的箭头,或者其他情况
-
修改接口
接口MphInter新增方法后,他的实现类Mph也需要重写接口方法,同时接口应该是比较稳定可靠的,不应该随意修改。
-
修改实现类
修改Mph类的方法,新增了一个getContrlolRpm的方法,那么将出现两个读取速度的方法,可以实现需求但不是最优解
-
通过扩展实现变化
我们可以增加一个子类ControlRpm,来继承父类Mph类,覆写getMph方法(为了简化速度控制逻辑,重新写了一个方法controlRpm进行替代)
后续有新的要求后,可以直接新建子类,继承父类
既可以保证新需求可以实现,又可以保证先有功能的稳定
里氏替换原则
在上述开闭原则中,同时也实现类里氏替换原则,将父类Mph设计为抽象类,让子类ControlRpm继承父类并实现在父类中声明的方法getMph(int rpm)
可以很方便地扩展系统的功能,无需修改原有子类的代码,增加新的功能可以通过增加一个新的子类来实现。
单一职责原则
一个对象应该只包含单一的职责,并且该职责被完整地封装在一个类中。
-
接受传感信号
拆分成了两个类:SpsTranslateRpm类 和 FuelConsumption类
sps转化成rpm实现类
public class SpsTranslateRpm implements SpsTranslateRpmInter油耗量实现对象
public class FuelConsumption implements FuelConsumptionInter -
数据转化控制
拆分为两个类:Mile类 、 Mph类 、ControlRpm类
英里实现类
public class Mile implements MileInter
速度实现类,抽象为父类
public abstract class Mph implements MphInter
//速度控制类,Mph的子类
public class ControlRpm extends Mph
-
驱动仪表板
拆分为两个类:LedShow类 、RingAlarm类
发光二极管显示实现类
public class LedShow implements LedShowInter
响铃接口实现类,实现超速响铃
public class RingAlarm implements RingAlarmInter
提高类的可维护性和可读写性 一个类的职责少了,复杂度降低了,代码就少了,可读性也就好了,可维护性自然就高了。
降低变更的风险 一个类的职责越多,变更的可能性就越大,变更带来的风险也就越大
接口隔离原则
客户端不应该依赖它不需要的接口;一个类对另一个类的依赖应该建立在最小的接口上。

//油耗量接口
public interface FuelConsumptionInter {
double getMpg(int gph,int mph);
}
//发光二极管显示接口
public interface LedShowInter {
void ledShow(String something);
}
//行使英里接口
public interface MileInter {
//得到行使的英里 (rpm转速)
int getMile(int rpm, int time);
}
//速度接口
public interface MphInter {
String getMph(int rpm);
}
//超速响铃接口
public interface RingAlarmInter {
void ring(int mph);
}
//将Sps转化成rpm的接口
public interface SpsTranslateRpmInter {
int getRpm(int sps);
}
迪米特法则
如果两个类不必彼此直接通信,那么这两个类就不应当发生直接的相互作用。如果其中的一个类需要调用另一个类的某一个方法的话,可以通过第三者转发这个调用。
在对其他类的引用上,将引用其他对象的次数降到最低,降低类的耦合
在数字控制面板中,对于对象与对象之间,只能通过get之类的方法来获得其中的对象值,对象并不能直接调用另一个对象的变量。
限制另一个类对本类成员的访问权限
//1.计算rpm 转速 mph结果为设置的2500
int rpm = STR.getRpm(125);
//2.计算英里
int total_mile = mile.getMile(rpm, 3);
//3.计算速度 speed为设置的90迈
String speed = control.getMph(rpm);
//4.计算油耗量 结果计算为450/90=50
double fuel_loss = fuelConsumption.getMpg(450, control.getMph());
油耗的计算中也定义了参数mph,避免了直接调用ControlRpm类的成员变量mph
public double getMpg(int gph, int mph) {
mpg = mph*1.0 / gph;
return mpg;
}
对于ControlRpm类,也是只能通过getMph()来获取成员变量mph
public int getMph() {
return mph;
}
完整代码实现
补充:数字仪表盘设置为抽象类,以适应不同类型的车
接口
分别建立接口文件
FuelConsumptionInter
LedShowInter
MileInter
MphInter
RingAlarmInter
SpsTranslateRpmInter
//油耗量接口
public interface FuelConsumptionInter {
double getMpg(int gph,int mph);
}
//发光二极管显示接口
public interface LedShowInter {
void ledShow(String something);
}
//行使英里接口
public interface MileInter {
//得到行使的英里 (rpm转速)
int getMile(int rpm, int time);
}
//速度接口
public interface MphInter {
String getMph(int rpm);
}
//超速响铃接口
public interface RingAlarmInter {
void ring(int mph);
}
//将Sps转化成rpm的接口
public interface SpsTranslateRpmInter {
int getRpm(int sps);
}
接口实现类
建立文件
FuelConsumption
LedShow
Mile
Mph
RingAlarm
SpsTranslateRpm
ControlRpm
//油耗量实现对象
public class FuelConsumption implements FuelConsumptionInter {
//定义mpg为:一加仑能够行驶的英里
private double mpg;
//计算mpg的值并返回(gph为油耗量)
@Override
public double getMpg(int gph, int mph) {
mpg = mph*1.0 / gph;
return mpg;
}
}
//发光二极管显示实现类
public class LedShow implements LedShowInter {
//传入需要显示的内容
@Override
public void ledShow(String something) {
System.out.println(something);
}
}
//英里实现类
public class Mile implements MileInter {
private int totalMile;
//计算总的英里数(rpm转速)
@Override
public int getMile(int rpm, int time) {
totalMile = rpm * time;
return totalMile;
}
}
//速度实现类,抽象为父类
public abstract class Mph implements MphInter {
//2.将转速转化为速度
@Override
public abstract String getMph(int rpm);
}
//响铃接口实现类,实现超速响铃
public class RingAlarm implements RingAlarmInter{
//1.定义常量最高速度 和 响铃
private static final int SPEED_LIMIT = 80;
//2.默认不响铃
private boolean ring_alarm = false;
@Override
public void ring(int mph) {
if(mph>=80){
System.out.println("超速");
//把响铃设置为true
ring_alarm = true;
}
}
public boolean isRing_alarm() {
return ring_alarm;
}
}
//sps转化成rpm实现类
public class SpsTranslateRpm implements SpsTranslateRpmInter {
@Override
//通过sps来计算rpm(转速),并返回
public int getRpm(int sps) {
/*通过一系列计算,
将sps转换成了rpm
*/
//假设得到最终转化结果rpm为2500
int rpm = 2500;
return rpm;
}
}
//速度控制类,Mph的子类
public class ControlRpm extends Mph {
//1.定义速度mph
private int mph;
@Override
public String getMph(int rpm) {
/*4.通过传入参数rpm,
经过一系列计算得到了速度mph
...
...
*/
//5.比如最后获得到的速度mgh为90迈
mph = 90;
boolean control_speed = true;
if (control_speed == true) {
return "+" + mph;
} else {
return "-" + mph;
}
}
public int getMph() {
return mph;
}
}
仪表盘数字控制类
//数字仪表板控制
public abstract class DigitalDashboardControl {
//1.创建油耗量对象
private FuelConsumption fuelConsumption;
//2.创建sps转化rpm对象
private SpsTranslateRpm STR;
//3.创建速度对象
private Mph mph;
//4.创建行使英里对象
private Mile mile;
//5.创建发光二极管显示对象
private LedShow ledShow;
//6.创建超速警告对象
private RingAlarm ringAlarm;
//7.创建速度控制对象
private ControlRpm control;
public DigitalDashboardControl() {
fuelConsumption = new FuelConsumption();
STR = new SpsTranslateRpm();
mile = new Mile();
ledShow = new LedShow();
ringAlarm = new RingAlarm();
control = new ControlRpm();
}
public void control() {
//1.计算rpm 转速 mph结果为设置的2500
int rpm = STR.getRpm(125);
//2.计算英里
int total_mile = mile.getMile(rpm, 3);
//3.计算速度 speed为设置的90迈
String speed = control.getMph(rpm);
//4.计算油耗量 结果计算为450/90=50
double fuel_loss = fuelConsumption.getMpg(450, control.getMph());
//5.二极管显示油耗量和里程
ledShow.ledShow("油耗量:" + fuel_loss);
ledShow.ledShow("里程:" + total_mile);
// //6.1获取加速或者减速状态 ,flag 为当前加速+ 减速- 状态
// String flag = control.controlRpm(true);
//6.2二极管显示速度
ledShow.ledShow("速度:"+control.getMph(rpm));
//7.获取响铃状态如果铃声打开中,则在响铃
// 当前速度为90, 限制的速度为80
ringAlarm.ring(control.getMph());
if(ringAlarm.isRing_alarm()==true){
System.out.println("正在响铃");
}
}
}
汽车类
Bus
public class Bus extends DigitalDashboardControl{
public Bus() {
}
}
测试类
Test文章来源:https://www.toymoban.com/news/detail-421917.html
public class Test {
public static void main(String[] args) {
Bus bus = new Bus();
bus.control();
}
}
程序运行
 文章来源地址https://www.toymoban.com/news/detail-421917.html
文章来源地址https://www.toymoban.com/news/detail-421917.html
到了这里,关于软件工程:数据流图,智能汽车代码功能实现(Java)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!