一、专有名词
VRU:Vulnerable Road Users,弱势道路使用者,包括行人、两轮车。
RT-Range:真值,用于测量实时的位置、距离、速度、方向等信息,如测试中需要用到两车之间的相对距离、速度可以在自车和目标车上装RT-Range。
LaunchPad:LunchPad是一个可滑动的底板,里面有机械结构、滑轮等,上面可安装假人假车,人为控制速度拖动假人假车往前走,同时可以获取其实时的距离、速度、方位角等信息。

二、项目及团队
1、项目背景/项目介绍?
目前在做的是xx车辆的ADAS项目,项目主要分两个阶段,V1阶段主要是是传感器、执行器的测试(工作内容:编写测试用例、评审、发布,然后根据测试用例编写测试方案,包括车辆改制、人员安排、时间安排、项目预算,设备租赁等)。
之后就是根据测试用例及方案去试验场测试,测试完成进行结果分析以及测试报告的编写。
V2阶段则为ADAS相关功能的验证测试(AEB、ACC、LKA、LCA、BSD、DOW等),这个阶段也是要编写测试用例及发布。
V2阶段根据开发成熟度细分为V2.1、V2.2、V2.3,因成熟度不同,每个阶段会选取部分测试用例安排测试计划及测试执行、测试报告编写。
2、项目人员构成及职责划分?
例:
①产品(摄像头、毫米波雷达、激光雷达);
②开发(系统开发/应用软件开发/底层软件开发/域控制器开发/硬件开发);
③测试(测试用例、整车测试、试验管理)30人左右:测试用例组:对接需求,写测试用例
整车测试:实车测试,测试用例执行试验管理:设备/车辆管理,场地预约
④产品运营中心。
3、测试日常工作包含内容?
基础:
1)根据功能描述和需求完成传感器性能测试用例的编制及发布,包括Camera、Radar、Lidar等;
2)完成测试方案的编制,包括车辆改制、测试计划、人员安排等;
3)根据测试用例完成传感器性能测试;
4)使用CAN工具完成传感器性能测试结果分析;
5)编写传感器性能测试报告及评审;
6)依据测试用例及需求说明书完成AEB/ACC/LKA等功能测试规范的编制及发布;
7)根据开发进度完成各功能测试计划安排;
8)根据测试规范完成功能验证测试;
9)完成功能测试结果分析并跟进问题改进进度;
10)测试报告的编制、评审;
11)负责自动驾驶系统道路测试工作,记录道路测试问题,形成道路测试报告;
12)分析道路测试问题,对测试问题进行分类、管理和跟踪;
13)协助研发团队进行研发测试和问题复现;
14)完成上级领导安排的其他任务,如:VRU驱动系统使用说明书、Lidar操作指导书的编制、传感器标定测试等。
进阶:
1)负责团队测试工具框架搭建,编写测试数据生成、测试日志分析等测试辅助工具;
2)负责建立自动化测试框架,协助完成自动化脚本及用例的编写;
3)MATLAB/simulink/carsim完成无人车运动学和动力学的建模;
4)利用carsim和simulink联调实现车辆队列模型通信及构型;
5)使用PID/LQR等控制控制算法最终实现车道保持辅助功能。
4、项目周期?
例:ADAS从立项到交付正常要一年半到2年多。
5、测试报告内容?
①试验目的、试验规范;
②试验设备(包括被测车辆信息、数采系统、目标物、真值系统等);例:车辆型号、传感器版本、执行器版本、域控制器版本、试验前后车辆里程。
③试验时间、地点、人员;
④试验环境(天气、光照、路面等信息);
⑤试验结果(以表格形式列出每条用例实际测试的结果分析)。
三、传感器性能测试
1、测试流程?
例:首先对接需求,根据需求完成相关传感器性能测试用例的编写及评审。
然后编写测试方案,包括测试计划及车辆改制等。
测试计划主要是根据测试用例安排测试所需要的时间计划;车辆改制则是根据需求把传感器安装到试验车指定位置,前置毫米波雷达一般是安装在前保险杠上,激光雷达一般安装在车顶,然后接网关之类的,需要读取到车辆底盘信号,车身信号以及雷达信号,到试验场还要租赁安装真值系统,及launchpad、假人假车等。
剩下的就是按照测试用例执行(V2阶段的各功能测试则不需要再安装传感器等,此阶段传感器/执行器啥均已经集成到试验车)。
2、车辆改制?实车环境搭建?
事项:车辆准备、传感器安装规范、传感器支架制作、传感器线束、电源(12V/24V/220V)、backbone(车身/主干网)、Chassis CAN(底盘),网关转发车辆信号到雷达。
3、哪些目标物可以装RT-Range?
只有目标车装真值,行人/两轮车使用的是假人/假自行车装在LaunchPAD上,可以获取距离/速度/方位角等信息。
4、传感器性能怎么测?
在车上接上真值、雷达、底盘等线束,保证可以读取到这些数据,然后在测试机的CAN工具中录制数据,按照测试用例的步骤执行,所有步骤完成了,结束录制,保存数据即可。
5、录制的软件?
Radar:CANOE工具,雷达配的上位机软件(如果有的话),以及记录场景的摄像头(类似于行车记录仪)。
Lidar:上位机软件用于显示实时点云图及回放功能,采集用Wireshark。
6、传感器性能测试有哪些场景?
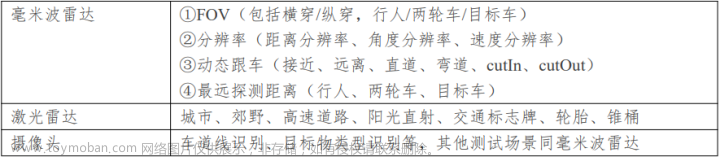
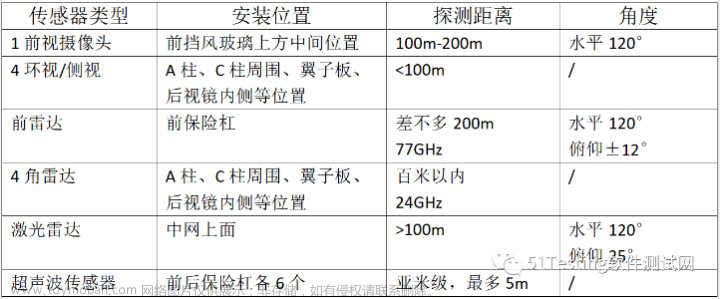
7、各传感器安装位置?有效距离?
8、各传感器优缺点?

9、传感器是否需要标定?
测试前是否需要标定,还是要看用的哪家供应商的传感器,有的需要自己标定,有的供应商已经标定好。
例:xx供应商的雷达的标定使用的是自己的标定软件,过程也比较简单,在车辆驾驶状态下发送一串16进制的数组就行,同样可通过发送16进制的数组可以读取到标定是否100%。摄像头的标定有内参标定和外参标定,标定的目的主要有两个,一个是消除畸变,一个是统一坐标系,标定就是为了获取内/外参数矩阵,用的是张氏标定法,通过拍摄N组棋盘格的照片实现。此外还有其他的标定方法,比如基于自然场景的标定。
10、坐标系是如何确定的?坐标原点一般在哪?
在ADAS测试中一般会统一采用右手坐标系,x轴朝前,y轴朝左,z轴朝上常用的坐标原点有前/后轴中点(真值系统等)、前保险杠中心(传感器)。
11、激光雷达关注哪些问题?
①交通标志牌等高反物体的点云质量是否出现上下延伸、前后拖点现象;
②物体边缘是否会出现不明点云;
③高速运动中观察周围路灯杆是否倾斜、卷曲、断裂等情况;
④阳光直射场景噪点是否会增多。
12、数据如何传输(传输方式)?
摄像头:①视频信号转换为CAN信号直接输出;②通过千兆网卡实现通信。毫米波雷达:通过CAN总线给下游发送消息(数据格式为blf、binary log file,一种二进制文件)。
激光雷达:以太网(CAN传输速度最大只有1M/s,激光雷达点云数据量大,因此用以太网)。
CAN总线最大传输速率是1M/s,以太网10M/s,毫米波雷达采集的数据不是很大,采一段数据大概几十兆,所以CAN够用;但激光雷达的点云数据非常大,录一两分钟的数据就有几百兆数据,所以用以太网;LIN速度只有几十kb/s,一般用在:门、方向盘、座椅、空调、照明等。
13、数据分析具体分析哪些方面?报文看哪些?如何分析?
数据分析主要看传感器采集的数据和真值的误差Dx/Dy/Vx/Vy(横纵向距离和横纵向速度),计算平均值、方差。
分析的过程:首先在CANOE工具里导入dbc文件,包括车身dbc,底盘dbc,真值dbc等(dbc就是CAN数据库,里面定义了节点、报文及对应信号的定义及说明等信息),然后将测试采集到的数据(blf格式)通过工具转成csv格式导出,之后在csv文件中筛选出真值和雷达相关数据,主要是横纵向距离及速度,进行比较,计算平均值和方差。
14、数据分析,误差多少是合格的?
例:距离误差在0.7m之内。
15、测试对天气的要求?
天气一般是在晴朗的天气下进行的,测试规范里有对天气的要求:光照强度不低于20000lux,夜间实验光照强度不高于11lux,水平能见度大于1km,可参考C-NCAP2021。此外由于不同传感器在恶劣环境下的表现不同,也会适当涉及雨雾冰雪这种天气。
16、回归测试策略?
根据性能测试结果分析哪些场景下传感器的性能表现较差,挑选典型测试用例进行回归测试。
17、传感器性能如何评价的(评价术语)?
传感器性能测试:横纵向位置测量准确、有效FOV略小、原距离下FOV表现不理想,目标物初次稳定识别的距离散布很大、测试数据没有明显规律、中远距离出现目标短暂丢失现象、对不同目标物的最远探测距离都很稳定、左右两侧误差分布更为集中、横向误差一般且随纵向距离增大而迅速增大不利于目标物的融合、在各个距离段误差一致性更好同时测量的精密度更高,有利于通过补偿缩小系统误差……
最后:
可以到我的个人号:atstudy-js,可以免费领取一份10G软件测试工程师面试宝典文档资料。以及相对应的视频学习教程免费分享!其中包括了有基础知识、Linux必备、Mysql数据库、抓包工具、接口测试工具、测试进阶-Python编程、Web自动化测试、APP自动化测试、接口自动化测试、测试高级持续集成、测试架构开发测试框架、性能测试等。文章来源:https://www.toymoban.com/news/detail-423324.html
这些测试资料,对于做【软件测试】的朋友来说应该是最全面最完整的备战仓库,这个仓库也陪伴我走过了最艰难的路程,希望也能帮助到你!文章来源地址https://www.toymoban.com/news/detail-423324.html
到了这里,关于高薪测试员必备:快速入行车载测试,ADAS测试面试题汇总(一)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!