谈起舵机最初的了解应用于航模,偶然的机会在网上看到有牛人使用多个舵机做人形机器人的关节,感觉这小东西很有趣,蒙发了买来学习学习的想法,这已经是多年前的事了,后来由于某些原因,这个想法直到今年才落地。小东西到手后,把玩了解后,本人把学习过程记录下来,分享出来,由于本人水平有限,疏漏难免。
一、知识链接:
1、SG90舵机简介:

舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。
SG90 舵机技术参数:
| 产品名称 |
SG90 9g 塑料齿数字舵机 |
| 产品净重 |
9g |
| 产品尺寸 |
23*12.2*29mm |
| 产品扭矩 |
1.5kg/cm |
| 反应速度 |
0.3sec/60degree |
| 工作电压 |
4.2V-6V |
| 使用温度 |
0-55度 |
| 动作死区 |
10us |
| 齿轮介质 |
塑料 |
| 工作模式 |
模拟 |
2、电路接口:

- 棕色:GND,2、红色:+5V,3、橙色:脉冲输入端
3、工作原理:
控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。

舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。
4、控制原理:
舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关系是这样的:
0.5ms--------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
请看下形象描述吧:

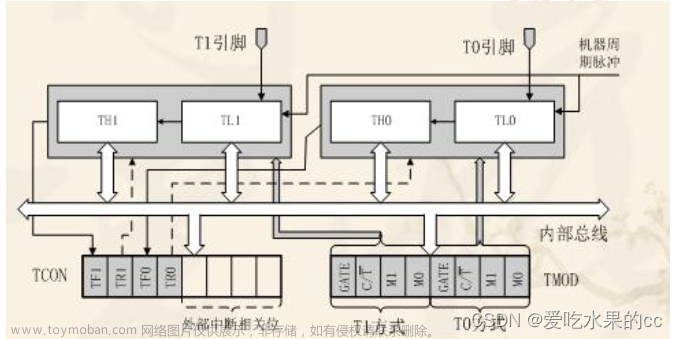
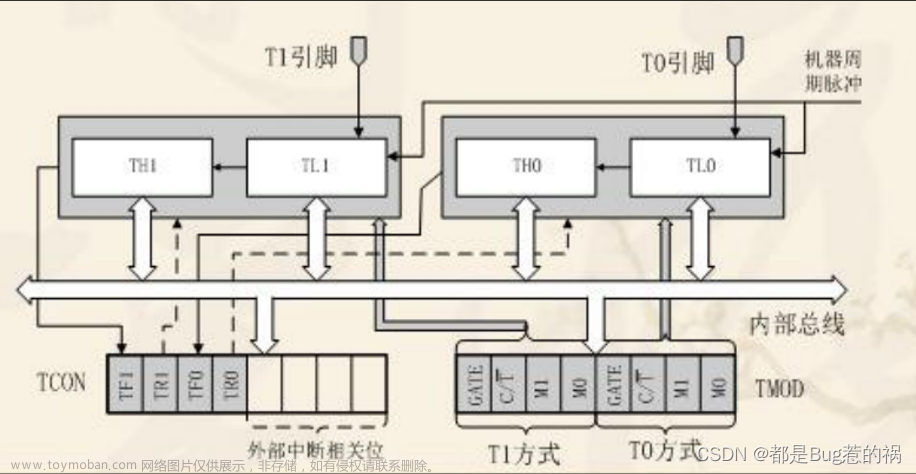
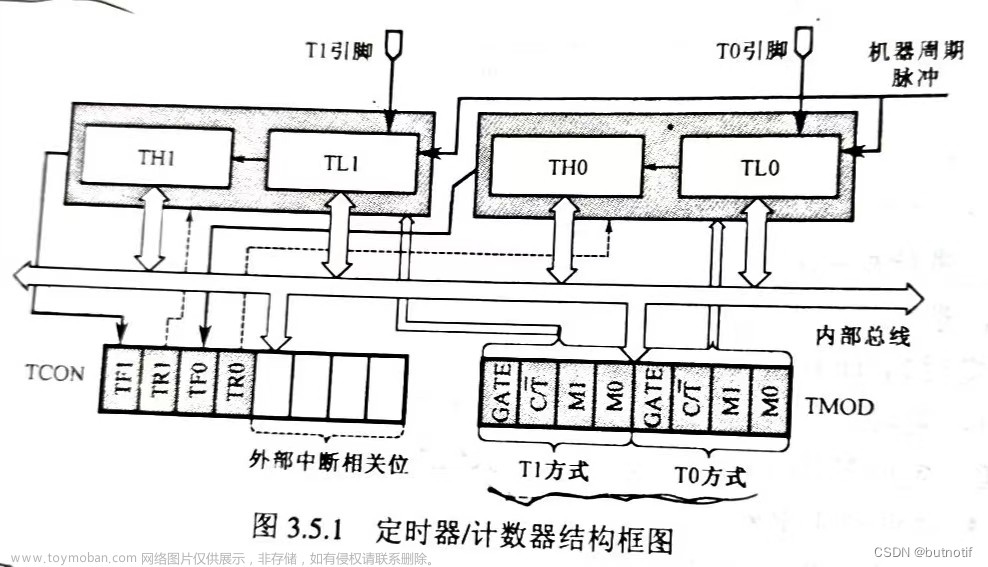
二、编程控制:
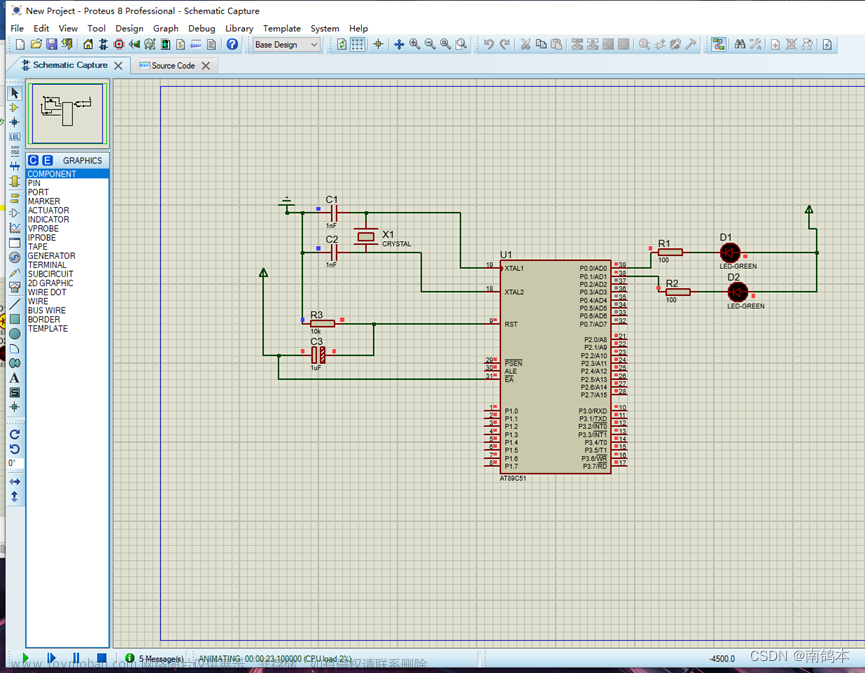
1、硬件的连接:(如下图)

2、控制要求:
1)系统上电:按下KEY1开始工作,舵机快速回0度。
2)工常工作:舵机从0度出发以0.5s每45度的速由左向右运动,直到180度后,从180度出发以0.5s每45度的速由右向左运动,直到0度后,往复运动。
3)当再次按下KEY1暂停。
4)再次按下KEY1后继续往复运动。
3、实现代码:
#include "reg52.h"
/* define SFR */
sfr T2MOD = 0xc9; //timer2 mode register
sbit out = P0^0; //Clock Output pin
sbit KEY3=P3^2;//控制循环
unsigned char count,flag,flag1,flag2;
unsigned int count1,count2;
void DelayUs2x(unsigned char t)
{
while(--t);
}
void DelayMs(unsigned char t)
{
while(t--)
{
//大致延时1mS
DelayUs2x(245);
DelayUs2x(245);
}
}
//舵机的控制,需要一个20ms的时基脉冲,控制高电平时间为0.5ms~2.5ms范围内即可控制舵机在0 ~ 180°转动。
//
//t=0.5ms---------------舵机转动到0° flag=5
//t=1.0ms---------------舵机转动到45° flag=10
//t=1.5ms---------------舵机转动到90° flag=15
//t=2.0ms---------------舵机转动到135° flag=20
//t=2.5ms---------------舵机转动到180° flag=25
void Timer2Init(void) //100微秒@11.0592MHz
{
T2MOD = 0x00; //初始化模式寄存器
T2CON = 0x00; //初始化控制寄存器
TL2 = 0xA4; //设置定时初始值
TH2 = 0xFF; //设置定时初始值
RCAP2L = 0xA4; //设置定时重载值
RCAP2H = 0xFF; //设置定时重载值
//TR2 = 1; //定时器2开始计时
ET2=1;
EA=1;
count=0;
flag=5;//初始位置
flag1=0;
flag2=1;
count1=0;
}
void main()
{
Timer2Init();
while(1)
{
if(KEY3==0)
{
DelayMs(20);
if(KEY3==0)
{
while(KEY3==0);
TR2 = 1;
flag1=!flag1;
}
}
}
//输入程序代码
}
void t2_isr() interrupt 5 using 1
{
TF2=0;
count++;
count1++;
if(count>=flag)
{
count=0;
out=~out;
}
if(count1>=1000)
{
count1=0;
count2++;
if(count2>=5)
{
count2=0;
if(flag>=25) flag2=0;
if(flag<=5) flag2=1;
if(flag2==0&&flag1)flag-=5;
if(flag2==1&&flag1)flag+=5;
//flag+=5;
}
}
}
4、运行效果:文章来源:https://www.toymoban.com/news/detail-423719.html
舵机控制文章来源地址https://www.toymoban.com/news/detail-423719.html
到了这里,关于C51单片机定时器2实现SG90舵机控制的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!