最近在做毕设,感觉网上信息不是很全,把自己的训练过程写下来供做这个方向的友友学习。只有简单的复现,其余的还没探索到。
一、数据集以及数据预处理
首先就是数据集:我用的数据集是西工大发布的数据集,NWPU VHR-10
链接:https://pan.baidu.com/s/1vfhDU2ORWUpL-aGM1PllGw
提取码:d5au
西工大数据集有十个类别,有三个文件夹,分别是positive image set(650张图片),negative image set(150张图片)和ground truth(650个txt文件)。
negative image set中的影像无对应的地物目标,
positive image set中的影像包括1个及以上对应的地物目标,
ground truth中的txt对应positive image set中地物目标的外接矩形
影像信息:
- image size: 500~1100 * 500~1100 * 3
- image number: 800
- object number: 3,651
标注信息:
10类,共3,651个目标;
- airplane,飞机
- ship,船
- storage tank,储罐
- baseball diamond,棒球场
- tennis court,网球场
- basketball court,篮球场
- ground track field,地面轨道场
- harbor,港口
- bridge,桥
- vehicle,交通工具
首先就是要把NWPU VHR-10转换成类似于voc数据集的形式然后再转化为yolo格式。
voc文件格式包含文件annotations存放图片信息、images存放训练图片、ImageSets存放图片训练信息。
将negative image set、positive image set内图片重新进行顺序编号为000001.jpg-000800.jpg,positive image set内图片为000001.jpg-000650.jpg,negative image set内图片为000651.jpg-000800.jpg,然后存放在image文件夹内。
数据集的annotations文件夹内的标注信息xml文件格式相同的xml文件。因为negative image set内图片无对应标注信息,所以只生成包含图片大小的xml文件。
ImageSets文件夹内划分为train.txt、val.txt、trainval.txt、test.txt四个文件,train代表训练集信息,val代表验证集信息,trainval代表训练集和验证集合并的数据信息,test代表测试集信息。
然后将voc格式转换为yolo格式,在目录下生成新的labels文件夹,把数据集路径导入txt文件,将每个xml标注信息提取转换为了txt格式,每个图像对应一个txt文件。
附上我的程序,其中main.py,1.py,2.py,3.py按顺序运行,因为后一个可能会用到前一个生成出来的东西的地址,把地址改成自己的地址就行。
链接:https://pan.baidu.com/s/1C04y16LIdyby5vhNEzsYSA
提取码:iz0r
有个地方出错了,3.py里面这一行改成底下那一句,少了一个bridge的类,harbor和vehicle之间少了一个,,然后tennis拼错了

classes = ['airplane','ship','storage tank','baseball diamond','tennis court','basketball court','ground track field','harbor','bridge','vehicle'] # class names!!!地址很多!!!而且一定要按照顺序来运行,如果不确定能不能生成文件夹,可以自己提前创建,然后直接运行就行,除了地址其余什么都不需要改!!!!!

二、环境搭建
首先附上yolov5官方源码,可以自己在Github上面下载,直接在Github上面搜yolov5,下载点赞最多的那个就行。我已经下载到我的网盘了,这里附上我的网盘链接。
链接:https://pan.baidu.com/s/1BENXIeyKgjwyAhnXA_n9Uw
提取码:3r9o
yolov5运行需要pytorch和cuda,因为我以前运行过一些神经网络深度学习的算法,所以我的环境都是已经搭建好的,另外如果想提高运行速度,是需要下载GPU的,只用cpu运行速度太慢,但是也能运行。python版本最好是3.7或者3.8,太高好像会报错,可以在运行前提前降一下python版本。我用的是3.8的conda版本。
如果是纯纯小白,看这篇博客,安装环境
记录使用Anaconda、Pycharm配置Yolov5环境全过程
环境搭建好下一步就是安装所需要的库
pip install -r requirements.txtyolov5自带一个requirements.txt文件,就是运行时能用到的所有库,按照上面的语句在终端也就是terminal运行一下就行,虽然一般情况下不会顺利完成,安装不了的就自己手动pip,可以win+r输入cmd进入命令提示符窗口,输入pip list,就可以看到所有的库和版本,对照requirements.txt给定的版本该install的install,该uninstall的uninstall。
三、运行程序
首先需要在data文件夹下创建一个mydata.yaml,像这样,mydata.yaml是data的子文件。

mydata.yaml的程序,yaml格式非常严格,除地址外的冒号后面都要有一个空格,不然会报错,(因为这个空格我改了两个小时),还有!!!
val,train,test的地址是我们数据预处理最后一步生成的地址。
在这里的哦,和文件夹是同级文件,至于两个.cache文件没有不用管,这是在训练的时候生成的,现在没有是正常的,别整错了哦。

这是程序,建议大家直接复制改个地址就行。简单介绍一下,前面三行是地址,后面是类别,最后一个是类别的数目,也可以根据自己数据集进行修改。
val: G:/csdn/yolov5/nwpu vhr-10/val.txt
train: G:/csdn/yolov5/nwpu vhr-10/train.txt
test: G:/csdn/yolov5/nwpu vhr-10/test.txt
names:
- airplane
- ship
- storage tank
- baseball diamond
- tennis court
- basketball court
- ground track field
- harbor
- bridge
- vehicle
nc: 10然后就是修改主程序,train.py,在utils文件下

主要需要修改的部分就是这五个,如果使用的是源码,只需要把第三行的yaml文件改成Mydata就行。第一行的.pt文件是权重文件,是可以换的,后面会提到。
接下来就是修改yaml文件,第二行我们使用的是yolo5s.yaml,所以在model/yolov5s.yaml中修改。

把nc数改成上面一样的就行,因为西工大数据集只有十个类别,所以我的nc是10。
接下来就可以运行了。
如果出现了连接不到网络或者对方无响应什么的问题,那就是在运行中它会自己下载权重文件,也就是上面第一行的yolov5s.pt 的pt文件,出现问题也没多大关系,可以自己下载权重文件然后放到文件夹里就行啦。
链接:https://pan.baidu.com/s/1p7_v_Wlicw_7oBUv-QNv_w
提取码:uarf
这是权重文件链接,放到根目录下,也就是说和model是同级文件,并行的!!
权重文件长这样,内存越大,权重越大,训练效果越好,并不绝对!!!小心过拟合,而且运行速度zun的很慢,我用5s运行的西工大数据集,100个epochs,跑了十个小时,换了个权重文件,5x的,一个小时都跑不完一个epoch。

这样就没问题啦,运行出来的结果会保存到runs\train\exp里面

四、detect
同样也是在utils文件夹下,修改这三个文件,第一个是我们使用的权重文件,第二个是我们需要检测的图片地址(一定要换成自己的图片!!!) ,第三个就是老规矩。然后就可以运行了,生成的结果在runs\test\exp里面,我忘了截图了。

五、换权重文件
第一步,修改train里面的五个框,把5s改成别的,建议如果用大的权重文件就把epoch和batch-size改小一点,要不然会超时的哦,第二不,改相应的pt文件里的nc数,有印象吧,然后就可以运行了,如果报错,可以直接用一行代码在终端也就是terminal里运行。(因为我自己运行的时候报了个莫名其妙的错误,所以用了这种方法,比较简单,不用改源码,什么都不需要改。
python train.py --batch-size 2 --epochs 100 --data G:\bishe\bishe1\yolov5-master\data\mydata.yaml --weights D:\BaiduNetdiskDownload\yolov5-weights\yolov5x.pt四个要素,batchsize,epochs,mydata.yaml的地址还有权重文件.pt的地址。这个方法不用改代码,什么都不需要动,无论你把我刚刚圈的几个框改成什么样了都没关系,直接这一行就行了
同样,detect也可以用这个方法。
python .\detect.py --source C:\Users\Administrator\PycharmProjects\yolov5\imgs\valid\images --weights C:\Users\Administrator\PycharmProjects\yolov5\runs\train\exp8\weights\best.pt两个要素,一个是你需要测试的图片的地址,另一个是pt文件,这个文件就是我们训练出来的了,在runs\train\exp\weights\best.pt
这个也一样,不需要改源码,也不用管你把源码框框改成什么样了,都可以用这个方法。

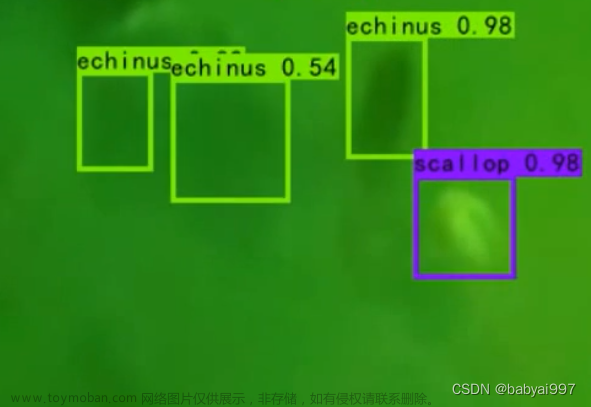
放一张detect的图片。文章来源:https://www.toymoban.com/news/detail-424950.html
这是我使用yolov5训练西工大数据集的全过程,我一点点摸索出来的,如果有不对的地方欢迎各位大佬留言指正,如果有什么问题也可以私信我,会的我会回答,不会的我只能深感抱歉,后续有改进我也会发出来的。谢谢大家!!!文章来源地址https://www.toymoban.com/news/detail-424950.html
到了这里,关于基于yolov5的遥感图像目标检测(NWPU VHR-10)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!