什么是双闭环控制
双闭环控制算法是一种先进的控制方法,它针对控制系统中存在的多种干扰和变化进行优化,提高系统的稳定性、精度和响应速度。
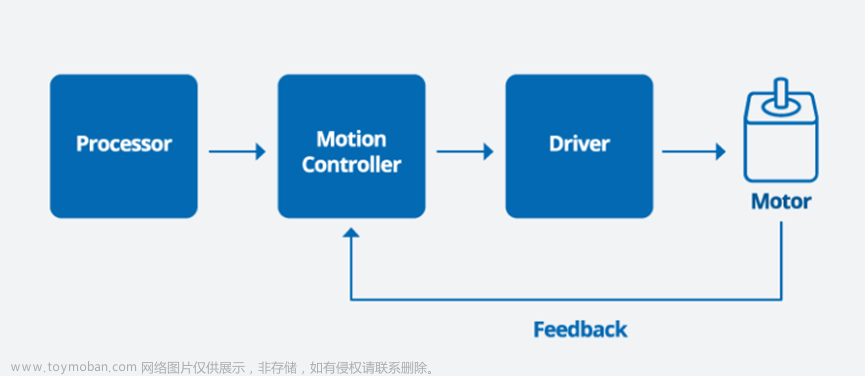
双闭环控制算法由内环和外环组成,分别控制系统的快速响应和系统稳定。
内环控制器主要负责对系统的实际输出进行监控和调节,以保证系统的响应速度快、精度高,通常采用比例、积分、微分控制算法,并且优化选择合适的参数。
而外环控制器则负责对系统的稳定性进行控制,在保证系统内环控制的精度和响应速度的情况下,通过将输出信号与参考输入信号进行比较,采用PID控制算法,调节系统的输出信号以达到稳定的目的。
调试双闭环PID算法
需要遵循以下步骤:
1.检查PID参数:首先检查PID参数是否正确。检查比例系数、积分系数、微分系数和采样时间等参数是否设置正确。
2.检查环路结构:确定双闭环结构是否正确。如果控制系统中存在多个环路,则需要确认每个环路的计算顺序是否正确。
3.检查信号质量:检查输入和输出信号的质量。输入信号质量不好会导致控制系统出现噪声或抖动。输出信号质量不好会导致控制系统响应不灵敏或不稳定。
4.模拟环境:模拟控制系统环境,使用模拟器或仿真软件进行模拟测试。模拟环境可以帮助开发人员更好地了解系统如何响应输入,从而更快地识别问题。
5.调整参数:根据模拟测试结果,调整参数,使控制系统更加灵敏和稳定。通过试验数据和实际运行情况来验证参数是否正确。
6.实际测试:如果以上步骤已经得到了良好的结果,接下来就可以进行实际测试并对结果进行分析。如果结果不如预期,还需要继续调整参数并进行验证。
内外环带宽
内环控制的带宽通常比外环控制的带宽高,比如机器人关节的控制需要更快的响应速度,而末端执行器的位置控制需要更稳定的控制。
具体来说,在双闭环PID控制器中,控制系统的内环和外环分别有其自身的比例、积分和微分参数(Kp,Ki和Kd)。内环的控制参数应该比外环的控制参数更高,以便快速响应机器人关节的控制,而外环的控制参数应该更小,以便更好地稳定机器人末端执行器的位置控制。
例如,在机器人控制中,内环的PID控制器可以具有Kp = 1000,Ki = 0,Kd = 10的控制参数,而外环的PID控制器可以具有Kp = 100,Ki = 0.1,Kd = 1的控制参数。
这种控制策略可以确保机器人控制系统在快速响应机器人关节控制的同时,也可以准确控制机器人末端执行器的位置。文章来源:https://www.toymoban.com/news/detail-426626.html
【最后一个bug】多平台都有更新和发布,大家可以一键三连,关注+星标,不错过精彩内容~ 文章来源地址https://www.toymoban.com/news/detail-426626.html
文章来源地址https://www.toymoban.com/news/detail-426626.html
到了这里,关于详解双闭环控制算法(理论篇)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!