目录
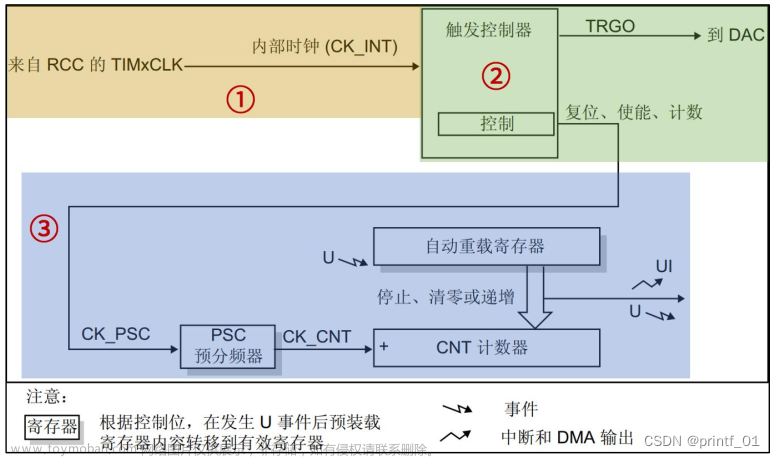
1 TIM定时器基础函数
HAL_TIM_Base_Start_IT
HAL_TIM_PeriodElapsedCallback
HAL_TIM_IRQHandler
HAL_TIM_Base_MspInit
HAL_TIM_Base_MspDeInit
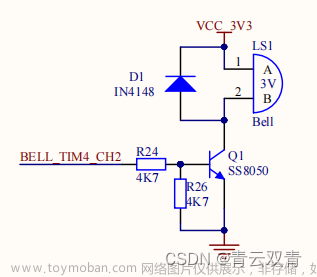
2 驱动步进电机
__HAL_TIM_SET_COMPARE
HAL_TIM_PWM_Start
__HAL_TIM_SET_AUTORELOAD
推荐阅读:4.基于STM32CubeMX使用TIM定时器_tao_sc的博客-CSDN博客_cubemx tim设置
1 TIM定时器基础函数
HAL_TIM_Base_Start_IT
开启定时器中断功能。
/**
*@brief 在中断模式下启动TIM Base生成。
* @param htim TIM Base handle
* @retval HAL状态
*/
HAL_StatusTypeDef HAL_TIM_Base_Start_IT(TIM_HandleTypeDef *htim)
{
uint32_t tmpsmcr;
/* Check the parameters */
assert_param(IS_TIM_INSTANCE(htim->Instance));
/* Check the TIM state */
if (htim->State != HAL_TIM_STATE_READY)
{
return HAL_ERROR;
}
/* Set the TIM state */
htim->State = HAL_TIM_STATE_BUSY;
/* Enable the TIM Update interrupt */
__HAL_TIM_ENABLE_IT(htim, TIM_IT_UPDATE);
/* Enable the Peripheral, except in trigger mode where enable is automatically done with trigger */
if (IS_TIM_SLAVE_INSTANCE(htim->Instance))
{
tmpsmcr = htim->Instance->SMCR & TIM_SMCR_SMS;
if (!IS_TIM_SLAVEMODE_TRIGGER_ENABLED(tmpsmcr))
{
__HAL_TIM_ENABLE(htim);
}
}
else
{
__HAL_TIM_ENABLE(htim);
}
/* Return function status */
return HAL_OK;
}eg: HAL_TIM_Base_Start_IT(&htim1);
HAL_TIM_PeriodElapsedCallback
/**
* @brief 在非阻塞模式下的周期过期回调
* @param htim TIM handle
* @retval 无
*/
__weak void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(htim);
/* NOTE : This function should not be modified, when the callback is needed,
the HAL_TIM_PeriodElapsedCallback could be implemented in the user file
*/
}HAL_TIM_IRQHandler
/**
*@brief 这个函数处理TIM中断请求。
* @param htim TIM handle
* @retval 无
*/
void HAL_TIM_IRQHandler(TIM_HandleTypeDef *htim)
{
/* Capture compare 1 event */
if (__HAL_TIM_GET_FLAG(htim, TIM_FLAG_CC1) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_CC1) != RESET)
{
{
__HAL_TIM_CLEAR_IT(htim, TIM_IT_CC1);
htim->Channel = HAL_TIM_ACTIVE_CHANNEL_1;
/* Input capture event */
if ((htim->Instance->CCMR1 & TIM_CCMR1_CC1S) != 0x00U)
{
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->IC_CaptureCallback(htim);
#else
HAL_TIM_IC_CaptureCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
/* Output compare event */
else
{
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->OC_DelayElapsedCallback(htim);
htim->PWM_PulseFinishedCallback(htim);
#else
HAL_TIM_OC_DelayElapsedCallback(htim);
HAL_TIM_PWM_PulseFinishedCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
htim->Channel = HAL_TIM_ACTIVE_CHANNEL_CLEARED;
}
}
}
/* Capture compare 2 event */
if (__HAL_TIM_GET_FLAG(htim, TIM_FLAG_CC2) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_CC2) != RESET)
{
__HAL_TIM_CLEAR_IT(htim, TIM_IT_CC2);
htim->Channel = HAL_TIM_ACTIVE_CHANNEL_2;
/* Input capture event */
if ((htim->Instance->CCMR1 & TIM_CCMR1_CC2S) != 0x00U)
{
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->IC_CaptureCallback(htim);
#else
HAL_TIM_IC_CaptureCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
/* Output compare event */
else
{
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->OC_DelayElapsedCallback(htim);
htim->PWM_PulseFinishedCallback(htim);
#else
HAL_TIM_OC_DelayElapsedCallback(htim);
HAL_TIM_PWM_PulseFinishedCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
htim->Channel = HAL_TIM_ACTIVE_CHANNEL_CLEARED;
}
}
/* Capture compare 3 event */
if (__HAL_TIM_GET_FLAG(htim, TIM_FLAG_CC3) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_CC3) != RESET)
{
__HAL_TIM_CLEAR_IT(htim, TIM_IT_CC3);
htim->Channel = HAL_TIM_ACTIVE_CHANNEL_3;
/* Input capture event */
if ((htim->Instance->CCMR2 & TIM_CCMR2_CC3S) != 0x00U)
{
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->IC_CaptureCallback(htim);
#else
HAL_TIM_IC_CaptureCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
/* Output compare event */
else
{
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->OC_DelayElapsedCallback(htim);
htim->PWM_PulseFinishedCallback(htim);
#else
HAL_TIM_OC_DelayElapsedCallback(htim);
HAL_TIM_PWM_PulseFinishedCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
htim->Channel = HAL_TIM_ACTIVE_CHANNEL_CLEARED;
}
}
/* Capture compare 4 event */
if (__HAL_TIM_GET_FLAG(htim, TIM_FLAG_CC4) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_CC4) != RESET)
{
__HAL_TIM_CLEAR_IT(htim, TIM_IT_CC4);
htim->Channel = HAL_TIM_ACTIVE_CHANNEL_4;
/* Input capture event */
if ((htim->Instance->CCMR2 & TIM_CCMR2_CC4S) != 0x00U)
{
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->IC_CaptureCallback(htim);
#else
HAL_TIM_IC_CaptureCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
/* Output compare event */
else
{
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->OC_DelayElapsedCallback(htim);
htim->PWM_PulseFinishedCallback(htim);
#else
HAL_TIM_OC_DelayElapsedCallback(htim);
HAL_TIM_PWM_PulseFinishedCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
htim->Channel = HAL_TIM_ACTIVE_CHANNEL_CLEARED;
}
}
/* TIM Update event */
if (__HAL_TIM_GET_FLAG(htim, TIM_FLAG_UPDATE) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_UPDATE) != RESET)
{
__HAL_TIM_CLEAR_IT(htim, TIM_IT_UPDATE);
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->PeriodElapsedCallback(htim);
#else
HAL_TIM_PeriodElapsedCallback(htim); //HAL_TIM_PeriodElapsedCallback
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
}
/* TIM Break input event */
if (__HAL_TIM_GET_FLAG(htim, TIM_FLAG_BREAK) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_BREAK) != RESET)
{
__HAL_TIM_CLEAR_IT(htim, TIM_IT_BREAK);
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->BreakCallback(htim);
#else
HAL_TIMEx_BreakCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
}
/* TIM Trigger detection event */
if (__HAL_TIM_GET_FLAG(htim, TIM_FLAG_TRIGGER) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_TRIGGER) != RESET)
{
__HAL_TIM_CLEAR_IT(htim, TIM_IT_TRIGGER);
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->TriggerCallback(htim);
#else
HAL_TIM_TriggerCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
}
/* TIM commutation event */
if (__HAL_TIM_GET_FLAG(htim, TIM_FLAG_COM) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_COM) != RESET)
{
__HAL_TIM_CLEAR_IT(htim, TIM_FLAG_COM);
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->CommutationCallback(htim);
#else
HAL_TIMEx_CommutCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
}
}HAL_TIM_Base_MspInit
/**
* @brief 对TIM Base MSP进行初始化.
* @param htim TIM Base handle
* @retval None
*/
__weak void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(htim);
/* NOTE : This function should not be modified, when the callback is needed,
the HAL_TIM_Base_MspInit could be implemented in the user file
*/
}HAL_TIM_Base_MspDeInit
/**
* @brief 对TIM Base MSP进行去初始化.
* @param htim TIM Base handle
* @retval None
*/
__weak void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef *htim)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(htim);
/* NOTE : This function should not be modified, when the callback is needed,
the HAL_TIM_Base_MspDeInit could be implemented in the user file
*/
}2 驱动步进电机
__HAL_TIM_SET_COMPARE
/**
* @brief 在运行时设置TIM捕获比较寄存器的值,而不需要调用另一个time ConfigChannel函数。
* @param __HANDLE__ TIM handle.
* @param __CHANNEL__ 要配置的TIM通道。
*该参数可以是以下值之一。
* @arg TIM_CHANNEL_1: 选择的TIM通道1。
* @arg TIM_CHANNEL_2: 选择的TIM通道2
* @arg TIM_CHANNEL_3:选择的TIM通道3。
* @arg TIM_CHANNEL_4: 选择的TIM通道4。
* @param __COMPARE__指定捕获比较寄存器的新值。
* @retval 无
*/
#define __HAL_TIM_SET_COMPARE(__HANDLE__, __CHANNEL__, __COMPARE__) \
(((__CHANNEL__) == TIM_CHANNEL_1) ? ((__HANDLE__)->Instance->CCR1 = (__COMPARE__)) :\
((__CHANNEL__) == TIM_CHANNEL_2) ? ((__HANDLE__)->Instance->CCR2 = (__COMPARE__)) :\
((__CHANNEL__) == TIM_CHANNEL_3) ? ((__HANDLE__)->Instance->CCR3 = (__COMPARE__)) :\
((__HANDLE__)->Instance->CCR4 = (__COMPARE__)))HAL_TIM_PWM_Start
/**
* @brief 启动PWM信号的生成。
* @param htim TIM handle
* @param Channel 要启用的TIM通道
*该参数可以是以下值之一。
* @arg TIM_CHANNEL_1: 选择的TIM通道1
* @arg TIM_CHANNEL_2: 选择的TIM通道2
* @arg TIM_CHANNEL_3: 选择的TIM通道3。
* @arg TIM_CHANNEL_4: 选择的TIM通道4
* @retval HAL status
*/文章来源:https://www.toymoban.com/news/detail-426921.html
HAL_StatusTypeDef HAL_TIM_PWM_Start(TIM_HandleTypeDef *htim, uint32_t Channel)
{
uint32_t tmpsmcr;
/* Check the parameters */
assert_param(IS_TIM_CCX_INSTANCE(htim->Instance, Channel));
/* Check the TIM channel state */
if (TIM_CHANNEL_STATE_GET(htim, Channel) != HAL_TIM_CHANNEL_STATE_READY)
{
return HAL_ERROR;
}
/* Set the TIM channel state */
TIM_CHANNEL_STATE_SET(htim, Channel, HAL_TIM_CHANNEL_STATE_BUSY);
/* Enable the Capture compare channel */
TIM_CCxChannelCmd(htim->Instance, Channel, TIM_CCx_ENABLE);
if (IS_TIM_BREAK_INSTANCE(htim->Instance) != RESET)
{
/* Enable the main output */
__HAL_TIM_MOE_ENABLE(htim);
}
/* Enable the Peripheral, except in trigger mode where enable is automatically done with trigger */
if (IS_TIM_SLAVE_INSTANCE(htim->Instance))
{
tmpsmcr = htim->Instance->SMCR & TIM_SMCR_SMS;
if (!IS_TIM_SLAVEMODE_TRIGGER_ENABLED(tmpsmcr))
{
__HAL_TIM_ENABLE(htim);
}
}
else
{
__HAL_TIM_ENABLE(htim);
}
/* Return function status */
return HAL_OK;
}__HAL_TIM_SET_AUTORELOAD
/**
* @brief 在运行时设置TIM自动加载寄存器的值,不需要再调用任何Init函数。
* @param __HANDLE__ TIM handle.
* @param __AUTORELOAD__指定计数器寄存器的新值。
* @retval 无
*/文章来源地址https://www.toymoban.com/news/detail-426921.html
#define __HAL_TIM_SET_AUTORELOAD(__HANDLE__, __AUTORELOAD__) \
do{ \
(__HANDLE__)->Instance->ARR = (__AUTORELOAD__); \
(__HANDLE__)->Init.Period = (__AUTORELOAD__); \
} while(0)
到了这里,关于【STM32】HAL库学习 3—hal_time的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!