一,TB6612电机驱动模块

文章来源地址https://www.toymoban.com/news/detail-427100.html


直流电机属于大功率器件,GPIO无法直接驱动,需要电机驱动模块配合,才能驱动直流电机.
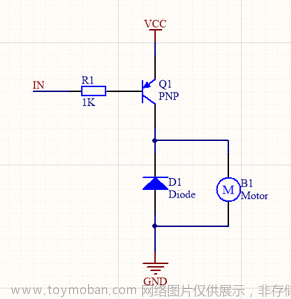
TB6612可以驱动2个直流电机。由IN1,IN2控制电机旋转方向,由PWM控制电机旋转速度。
二,代码部分

核心代码还是为PWM部分,直流电机初始化也只是多初始化2了两个GPIO口,用于产生电压差,驱动电机,并且可以通过2个GPIO口改变电机旋转方向。
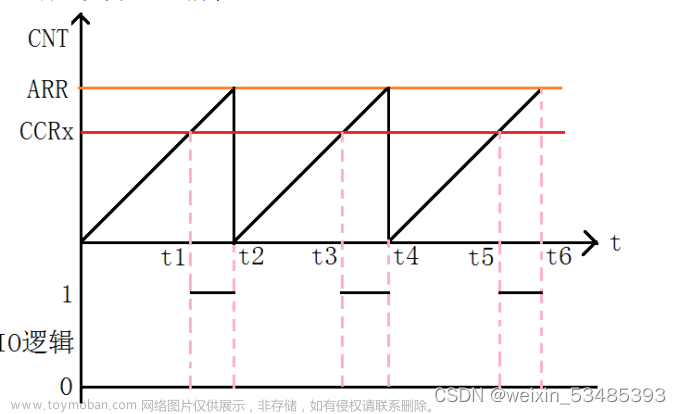
就是两个端口输出电平控制点击转动方向,然后中间那个端口通过输出占空比控制转速
PWM.c
#include "stm32f10x.h" // Device header
void PWM_Init(void)
{
//开启TIM2连接的总线APBB1
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIOA_InitStructure;
GPIOA_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIOA_InitStructure.GPIO_Pin=GPIO_Pin_2;
GPIOA_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIOA_InitStructure);
//选择内部时钟
TIM_InternalClockConfig(TIM2);
//时基单元初始化
TIM_TimeBaseInitTypeDef TIM_TimeBaseStruct;
TIM_TimeBaseStruct.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseStruct.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseStruct.TIM_Period=100-1; //ARR
TIM_TimeBaseStruct.TIM_Prescaler=36-1; //PSC
TIM_TimeBaseStruct.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseStruct);
TIM_OCInitTypeDef TIM_OCInitStructture;
TIM_OCStructInit(&TIM_OCInitStructture);
TIM_OCInitStructture.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitStructture.TIM_OCPolarity=TIM_OCPolarity_High ;
TIM_OCInitStructture.TIM_OutputState=TIM_OutputState_Enable;
TIM_OCInitStructture.TIM_Pulse=90; //CCR
TIM_OC3Init(TIM2,&TIM_OCInitStructture);
TIM_Cmd(TIM2,ENABLE);
}
void PWM_SetCompare3(uint16_t Compare)
{
TIM_SetCompare3(TIM2,Compare);
}Motor.c
#include "stm32f10x.h" // Device header
#include "PWM.h"
void Motor_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIOA_InitStructure;
GPIOA_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIOA_InitStructure.GPIO_Pin=GPIO_Pin_4 | GPIO_Pin_5;
GPIOA_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIOA_InitStructure);
PWM_Init();
}
void Motor_SetSpeed(int8_t Speed)
{
if(Speed>=0)
{
GPIO_SetBits(GPIOA,GPIO_Pin_4);
GPIO_ResetBits(GPIOA,GPIO_Pin_5);
PWM_SetCompare3(Speed);
}
else
{
GPIO_SetBits(GPIOA,GPIO_Pin_5);
GPIO_ResetBits(GPIOA,GPIO_Pin_4);
PWM_SetCompare3(-Speed);
}
}main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.h"
#include "Key.h"
#include "Buzzer.h"
#include "OLED.h "
#include "Motor.h"
uint8_t KeyNum;
int8_t Speed;
int main()
{
OLED_Init();
Motor_Init();
Key_Init();
OLED_ShowString(1,1,"Speed:");
while(1)
{
KeyNum=Key_Getnum();
if(KeyNum==1)
{
Speed+=20;
if(Speed>100)
{
Speed=-100;
}
Motor_SetSpeed(Speed);
OLED_ShowSignedNum(1,7,Speed,3);
}
}
}三、怎么选择输出占空比函数

这个函数TIM_SetCompare1,这个函数有四个,分别是TIM_SetCompare1,TIM_SetCompare2,TIM_SetCompare3,TIM_SetCompare4。
位于CH1那一行的GPIO口使用TIM_SetCompare1这个函数
位于CH2那一行的GPIO口使用TIM_SetCompare2这个函数
位于CH3那一行的GPIO口使用TIM_SetCompare1这个函数
以此类推
四、如何选择捕获/比较寄存器
在选择捕获/比较寄存器的时候,我们可以先根据输出比较的端口,在上面的图里面选择出输出的端口。如何对应选择出CHx端口,再选择相应的捕获/比较寄存器
 文章来源:https://www.toymoban.com/news/detail-427100.html
文章来源:https://www.toymoban.com/news/detail-427100.html
到了这里,关于PWM控制直流电机的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!