1 前言
本人也是零基础进行Arduino学习的初学者,做小车期间遇到过很多困难,在此写下整个小车的制作流程以及遇到的问题与解决方案,希望对后来者有所帮助。在制作期间参考了许多文章得到了大佬的指点,以及下面展示成果如建模等是由朋友做的,在此一并表示感谢。
总结来说,小车基于Arduino UNO单片机,通过并联L298N电机驱动板实现八输出(因为同时控制四个轮的正反转需要八个变量)来控制小车除前后直线移动,左拐右拐之外,还可以顺时针逆时针原地自旋以及向左向右横向平移。并加载Arduino扩展板实现循迹、寻光、避障、蓝牙遥控和无源蜂鸣器报警功能。
2 总体结构概括
2.1 机械结构
首先整体结构为双层亚克力板,如图其下层承载四个TT电机、三个循迹模块传感器以及两个红外避障传感器和18650电池组,上层承载Arduino开发板与拓展板、两个L298N电机驱动板、蜂鸣器、蓝牙模块和两个循光传感器。两层亚克力板间采用铜柱与螺栓联接。
车体亚克力板部分以及循迹、寻光、红外避障传感器、蓝牙模块、tt电机都是由淘宝买的套件小车的产品,不需要自己配置散件。可以购买时仔细阅读套件清单或者直接向商家问个清楚,商家都很有耐心的。(依次为红外避障、寻光、循迹传感器)



麦克纳姆轮是需要单独购买的,小车套件里面的是四个普通的轮子。电池也是单独购买的两节18650可充电锂电池,电机驱动板是两个L298N,此外还单独购买了一个无源蜂鸣器。这些单独购买的也可以很容易在淘宝上找到,但是有一些购买细节,这些在下文会单独说明。

2.2 电路连接
需要说明的是,虽然Arduino需要5V的供电电压,但是并不需要再额外配置一个5V电压源,因为两节18650接入电机驱动板供电后,电机驱动板可以有一路降压输出5V给Arduino板子。
对于蓝牙模块接线,除了蓝牙模块的+-与Arduino板子的+-对应以外。蓝牙模块上标注RX的接口需要连接板子TX的接口,同样蓝牙TX要对应板子RX(rx是接收receive,tx是发送transport)。同样容易出错的是上传程序时需要把蓝牙模块卸下,因为其占用着Arduino板子的RX与TX,程序报错无法上传。
对于不同的套件、接入不同的传感器有不同的接线图,认清是A口还是D口,哪里是VCC哪里是GND,灵活变通即可。接线图如图所示。

3 具体细节说明
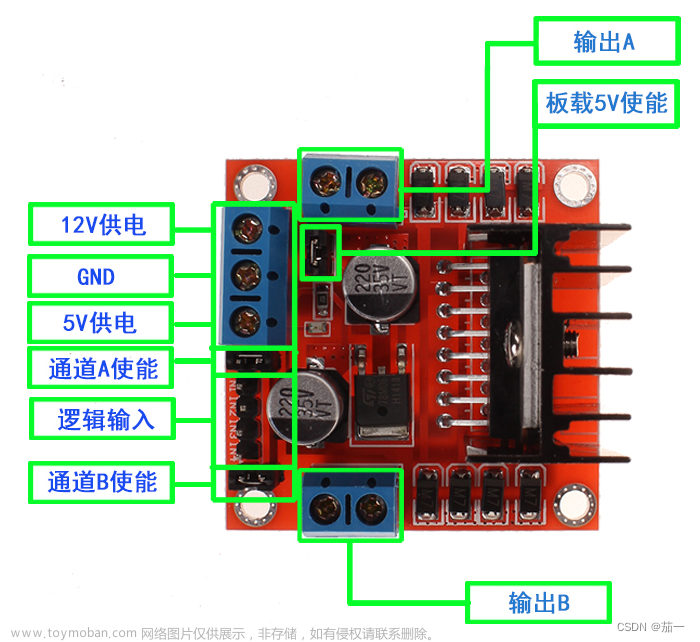
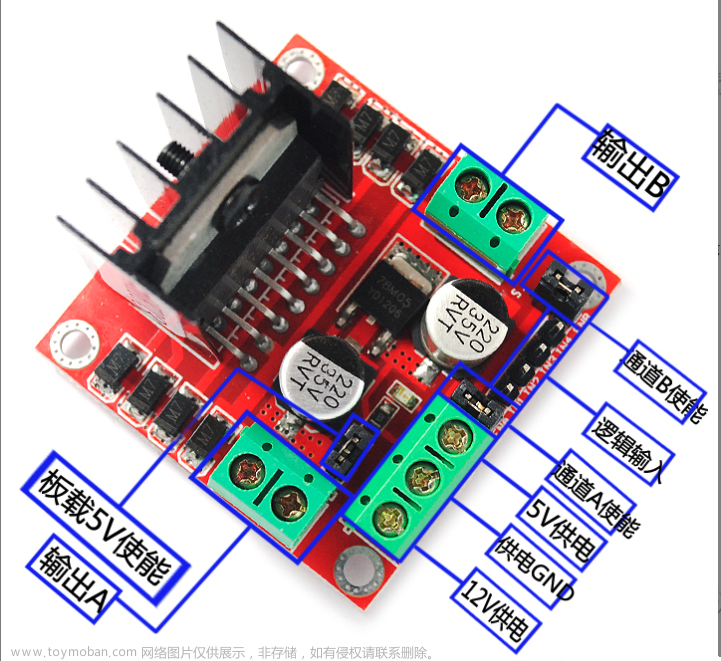
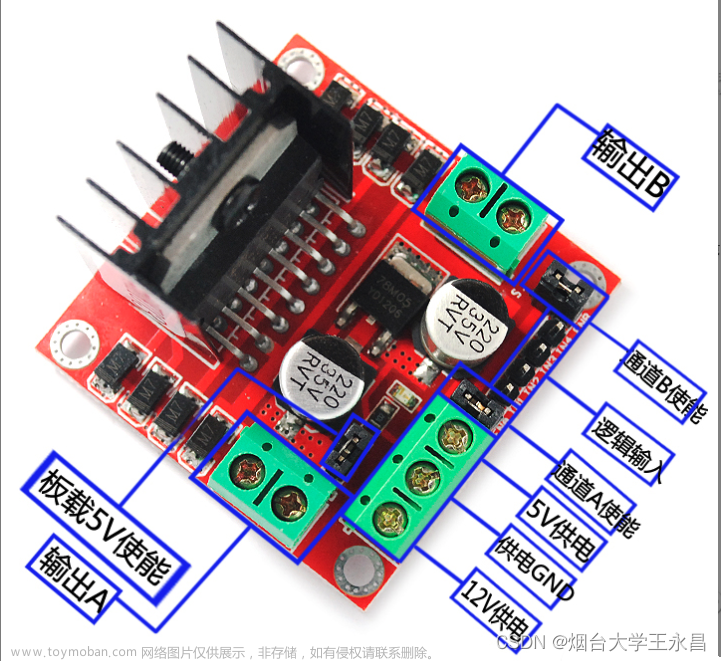
3.1 电机驱动板
电机驱动板是在Arduino主板和tt电机之间的角色,以实现对TT电机的控制。虽然只需要一个L293D就可以实现八输出,但是需要插到Arduino主板上进行供电,就因此无法再安装扩展板,也就没法安装众多的传感器(其实是可以的,但我不会,对不起)。

每个L298N有四个输入接口:IN1、IN2、IN3、IN4,用四根线和Arduino的四个Digital接口连接,以实现主板对电机驱动板的控制。每个L298N同时有四个输出接口OUT1、OUT2、OUT3、OUT4(与四个输入接口是一一对应的),因此用四根线可以分别连接两个电机的正负极,这样两个电机驱动板可以实现四个电机的正反转控制。由于电机安装方向和接线方向的影响,直接判断哪个接口可以使轮子正转也可以,单建议安装完电机后通过程序试一试来确定IN1、IN2、IN3、IN4四个接口中哪个接口输入高电平可以使轮子正转。

然后是电机驱动板之间的并联,就是电源的正极和两个电机驱动板的正极连接,从电机驱动板的5V引出一路给Arduino主板供电,电源负极和两个电机驱动板还有主板的负极连接在一起,如上图左侧电路示意图。并联的原因就是为了可以少用一个电源,减少麻烦,所以若是不想并联各自给电机驱动板配置一个电源也无所谓,记得两个电机驱动板和Arduino主板的GNG要接在一起就可以了。
3.2 麦克纳姆轮
对于四轮小车来说,一套麦克纳姆轮至少应含有两种不同的轮子。我们选择两种就好—两个左轮两个右轮(注意这个左右不是位于左边的轮子和位于右边的轮子的意思,是轮子的构造方向不一样)。左轮右边轮构型如图所示,所以购买的时候一定要和商家说清楚。


具体麦克纳姆轮如何实现平移以及自旋,还有轮子的安装顺序都可以看这篇文章,在此对作者表达感谢(不知道这样引用对不对)。然后控制程序可以见下文,我的控制程序更零基础(小白)一些。
https://blog.csdn.net/handsome_Ares/article/details/120140997?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522167679074216782429723326%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=167679074216782429723326&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~top_positive~default-1-120140997-null-null.142^v73^insert_down2,201^v4^add_ask,239^v2^insert_chatgpt&utm_term=%E9%BA%A6%E5%85%8B%E7%BA%B3%E5%A7%86%E8%BD%AE&spm=1018.2226.3001.4187https://blog.csdn.net/handsome_Ares/article/details/120140997?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522167679074216782429723326%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=167679074216782429723326&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~top_positive~default-1-120140997-null-null.142^v73^insert_down2,201^v4^add_ask,239^v2^insert_chatgpt&utm_term=%E9%BA%A6%E5%85%8B%E7%BA%B3%E5%A7%86%E8%BD%AE&spm=1018.2226.3001.4187
3.3 无源蜂鸣器
有源无源可能不是没有了解过的人想像的那个意思, “源” 不是指电源,而是指振荡源。简而言之无源蜂鸣器可以自己编写一些勉强分得清在唱什么的曲调,有源的就不可以。
需要注意的是想要实现蜂鸣器唱歌需要在程序中加入头文件 pitches.h,该文件包含典型音符的所有音高值。加入头文件的方法十分容易,若是不会可以百度一下。记得把头文件和Arduino程序文件放在同一个文件夹里就好。
如果有兴趣可以看下面这篇文章。(谢谢作者!)
https://luhuadong.blog.csdn.net/article/details/103395351?spm=1001.2101.3001.6650.2&utm_medium=distribute.pc_relevant.none-task-blog-2%7Edefault%7ECTRLIST%7ERate-2-103395351-blog-128067566.pc_relevant_recovery_v2&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2%7Edefault%7ECTRLIST%7ERate-2-103395351-blog-128067566.pc_relevant_recovery_v2&utm_relevant_index=5https://luhuadong.blog.csdn.net/article/details/103395351?spm=1001.2101.3001.6650.2&utm_medium=distribute.pc_relevant.none-task-blog-2%7Edefault%7ECTRLIST%7ERate-2-103395351-blog-128067566.pc_relevant_recovery_v2&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2%7Edefault%7ECTRLIST%7ERate-2-103395351-blog-128067566.pc_relevant_recovery_v2&utm_relevant_index=5
3.4 电源
电源是受挫最多的地方,起初图方便用六节南孚电池作为电源,结果程序在电脑上调试时好好的,一断开USB线用电源供电就执行的晕头转向,十分玄学。后来由大佬的指点发现是因为南孚电池电流太大导致Arduino主板一直不定时重启。
所以后来更换了更为稳定的两节18650可充电锂电池,一共7.4V,问题得以解决(要是实在解决不了可以先把所有程序都调好了后上传试试,说不定就可以了呢)。

3.5 其他
还有就是不可忽略的小车的传感器的调试环节,上传代码成功后小车依旧无法巡线无法避障,这时候可能不是代码的问题,可能是传感器输入调试没做好。网上或者淘宝商家也有一些传感器的调试方法可以借鉴,最重要的就是亲自一点点扭转传感器上的电位器一遍遍试,找到最合适的电位器位置以及最合适的传感器安装位置。(比如三个巡线传感器就可以适当离的宽一些)
最后小车还有一个非常玄学的地方,就是右侧后轮经常莫名其妙地没有指令就转起来了。即使重新接线也不行,令人困惑。没有找到根源,但是基于经验是只要按压小车前端就可以让他停止这种现象,所以用轧带将前端进行固定。
4 结果展示
4.1 建模
有点地方不太对,不过无伤大雅,加了一个车壳和保险杠,不过没加工出来。

4.2 巡线
GIF太大无法上传,想看看巡线、蓝牙遥控的视频可以去主页,写的时候还在审核不知道能不能过。至于避障、寻光也没必要上传了。
4.5 蓝牙遥控
蓝牙遥控的app是一个朋友做的,不方便共享,不过这玩意可以在应用市场下载,就是有些广告。下面是操作命令表,也可以到程序里自己差(避障模式2的指令是p,忘记写上了):

5 代码说明
俯看小车,车头在上将四个轮子分别编号为左1左2右1右2(程序中轮子的对应名称,这个需要根据前文所说的哪个接口接入高电平是正转自己更改程序,很简单小学二年级就学过)。文章来源:https://www.toymoban.com/news/detail-428149.html
这是无源蜂鸣器播放《致爱丽丝》的功能,需要的pitches.h头文件。头文件下面是各个功能合并后的代码,可以用蓝牙来进行功能模式的切换。由于用的都是些学c语言第一课就能学完的基础语句,具体原理看代码就能很容易看懂,就无需多言了。文章来源地址https://www.toymoban.com/news/detail-428149.html
//pitches.h 音高定义
//pitches.h 定义了不同音符对应的不同频率
#define NOTE_B0 31 //B0 ····7
#define NOTE_C1 33 //C1 ···1
#define NOTE_CS1 35 //C1#
#define NOTE_D1 37 //D1 ···2
#define NOTE_DS1 39 //D1#
#define NOTE_E1 41 //E1 ···3
#define NOTE_F1 44 //F1 ···4
#define NOTE_FS1 46 //F1#
#define NOTE_G1 49 //G1 ···5
#define NOTE_GS1 52 //G1#
#define NOTE_A1 55 //A1 ···6
#define NOTE_AS1 58 //A1#
#define NOTE_B1 62 //B1 ···7
#define NOTE_C2 65 //C2 ··1
#define NOTE_CS2 69 //C2#
#define NOTE_D2 73 //D2 ··2
#define NOTE_DS2 78 //D2#
#define NOTE_E2 82 //E2 ··3
#define NOTE_F2 87 //F2 ··4
#define NOTE_FS2 93 //F2#
#define NOTE_G2 98 //G2 ··5
#define NOTE_GS2 104 //G2#
#define NOTE_A2 110 //A2 ··6
#define NOTE_AS2 117 //A2#
#define NOTE_B2 123 //B2 ··7
#define NOTE_C3 131 //C3 ·1
#define NOTE_CS3 139 //C3#
#define NOTE_D3 147 //D3 ·2
#define NOTE_DS3 156 //D3#
#define NOTE_E3 165 //E3 ·3
#define NOTE_F3 175 //F3 ·4
#define NOTE_FS3 185 //F3#
#define NOTE_G3 196 //G3 ·5
#define NOTE_GS3 208 //G3#
#define NOTE_A3 220 //A3 ·6
#define NOTE_AS3 233 //A3#
#define NOTE_B3 247 //B3 ·7
#define NOTE_C4 262 //C4 1(中央C大调)
#define NOTE_CS4 277 //C4#
#define NOTE_D4 294 //D4 2
#define NOTE_DS4 311 //D4#
#define NOTE_E4 330 //E4 3
#define NOTE_F4 349 //F4 4
#define NOTE_FS4 370 //F4#
#define NOTE_G4 392 //G4 5
#define NOTE_GS4 415 //G4#
#define NOTE_A4 440 //A4 6
#define NOTE_AS4 466 //A4#
#define NOTE_B4 494 //B4 7
#define NOTE_C5 523 //C5 1·
#define NOTE_CS5 554 //C5#
#define NOTE_D5 587 //D5 2·
#define NOTE_DS5 622 //D5#
#define NOTE_E5 659 //E5 3·
#define NOTE_F5 698 //F5 4·
#define NOTE_FS5 740 //F5#
#define NOTE_G5 784 //G5 5·
#define NOTE_GS5 831 //G5#
#define NOTE_A5 880 //A5 6·
#define NOTE_AS5 932 //A5#
#define NOTE_B5 988 //B5 7·
#define NOTE_C6 1047 //C6 1··
#define NOTE_CS6 1109 //C6#
#define NOTE_D6 1175 //D6 2··
#define NOTE_DS6 1245 //D6#
#define NOTE_E6 1319 //E6 3··
#define NOTE_F6 1397 //F6 4··
#define NOTE_FS6 1480 //F6#
#define NOTE_G6 1568 //G6 5··
#define NOTE_GS6 1661 //G6#
#define NOTE_A6 1760 //A6 6··
#define NOTE_AS6 1865 //A6#
#define NOTE_B6 1976 //B6 7··
#define NOTE_C7 2093 //C7 1···
#define NOTE_CS7 2217 //C7#
#define NOTE_D7 2349 //D7 2···
#define NOTE_DS7 2489 //D7#
#define NOTE_E7 2637 //E7 3···
#define NOTE_F7 2794 //F7 4···
#define NOTE_FS7 2960 //F7#
#define NOTE_G7 3136 //G7 5···
#define NOTE_GS7 3322 //G7#
#define NOTE_A7 3520 //A7 6···
#define NOTE_AS7 3729 //A7#
#define NOTE_B7 3951 //B7 7···
#define NOTE_C8 4186 //C8 1····
#define NOTE_CS8 4435 //C8#
#define NOTE_D8 4699 //D8 2····
#define NOTE_DS8 4978 //D8#//(寻线 红外避障 蓝牙遥控 寻光)多功能程序
//***********************定义电机腳位*************************
#include "pitches.h"
int MotorLeft1R = 2;
int MotorLeft1B = 3;
int MotorLeft2R = 5;
int MotorLeft2B = 4;
int MotorRight1R = 10;
int MotorRight1B = 9;
int MotorRight2R = 6;
int MotorRight2B = 7;
// 记录曲子的音符
int melody[] = { 0, 0, NOTE_E5, NOTE_D5, NOTE_E5, NOTE_D5, NOTE_E5, NOTE_B4, NOTE_D5, NOTE_C5,
NOTE_A4, 0, NOTE_C4, NOTE_E4, NOTE_A4, NOTE_B4, 0, NOTE_E4, NOTE_G4, NOTE_B4,
NOTE_C5, 0, NOTE_E4, NOTE_E5, NOTE_D5, NOTE_E5, NOTE_D5, NOTE_E5, NOTE_B4, NOTE_D5, NOTE_C5,
NOTE_A4, 0, NOTE_C4, NOTE_E4, NOTE_A4, NOTE_B4, 0, NOTE_E4, NOTE_C5, NOTE_B4,
NOTE_A4};
// 音符持续时间:4为四分音符,8为八分音符
int noteDurations[] = { 4, 4, 8, 8, 8, 8, 8, 8, 8, 8,
4, 8, 8, 8, 8, 4, 8, 8, 8, 8,
4, 8, 8, 8, 8, 8, 8, 8, 8, 8, 8,
4, 8, 8, 8, 8, 4, 8, 8, 8, 8,
4, 4, 8, 8, 8, 8, 8, 8, 8, 8,
4};
int counter = 0;
char val;
//*************************定义寻线模块脚位************************************
const int SensorLeft = 8; //左传感器
const int SensorMiddle = 11; //中传感器
const int SensorRight = 12; //右传感器
int SL; //左传感器状态
int SM; //中传感器状态
int SR; //右传感器状态
const int barrier_left = A5; //左红外避障
const int barrier_right = A4; //右红外避障
const int followLight_left = A3; //左寻光
const int followLight_right = A2; //右寻光
//********************************************************************(SETUP)
void setup()
{
Serial.begin(9600);
pinMode(MotorLeft1R,OUTPUT);
pinMode(MotorLeft1B,OUTPUT);
pinMode(MotorLeft2R,OUTPUT);
pinMode(MotorLeft2B,OUTPUT);
pinMode(MotorRight1R,OUTPUT);
pinMode(MotorRight1B,OUTPUT);
pinMode(MotorRight2R,OUTPUT);
pinMode(MotorRight2B,OUTPUT);
pinMode(SensorLeft, INPUT); //
pinMode(SensorMiddle, INPUT);//
pinMode(SensorRight, INPUT); //
pinMode(barrier_left, INPUT);
pinMode(barrier_right, INPUT);
pinMode(followLight_left, INPUT);
pinMode(followLight_right, INPUT);
Serial.println("-----------------");
}
//******************************************************************(Void)
void advance(int a) // 前进
{
Serial.println("advance");
//直走 1的R为前,2的B为前
digitalWrite(MotorLeft1R, HIGH);
digitalWrite(MotorLeft1B, LOW);
digitalWrite(MotorLeft2R, LOW);
digitalWrite(MotorLeft2B, HIGH);
digitalWrite(MotorRight1R, HIGH);
digitalWrite(MotorRight1B, LOW);
digitalWrite(MotorRight2R, LOW);
digitalWrite(MotorRight2B, HIGH);
delay(a * 100);
}
void right(int b) //右转
{
Serial.println("right");
//右转(普通)
digitalWrite(MotorLeft1R, HIGH);
digitalWrite(MotorLeft1B, LOW);
digitalWrite(MotorLeft2R, LOW);
digitalWrite(MotorLeft2B, HIGH);
digitalWrite(MotorRight1R, LOW);
digitalWrite(MotorRight1B, LOW);
digitalWrite(MotorRight2R, LOW);
digitalWrite(MotorRight2B, LOW);
delay(b * 100);
}
void left(int c) //左转
{
Serial.println("left");
//左转(普通)
digitalWrite(MotorLeft1R, LOW);
digitalWrite(MotorLeft1B, LOW);
digitalWrite(MotorLeft2R, LOW);
digitalWrite(MotorLeft2B, LOW);
digitalWrite(MotorRight1R, HIGH);
digitalWrite(MotorRight1B, LOW);
digitalWrite(MotorRight2R, LOW);
digitalWrite(MotorRight2B, HIGH);
delay(c * 100);
}
void turnR(int d) //右转 双轮
{
Serial.println("turnR");
//右转自旋(快速)
digitalWrite(MotorLeft1R, HIGH);
digitalWrite(MotorLeft1B, LOW);
digitalWrite(MotorLeft2R, LOW);
digitalWrite(MotorLeft2B, HIGH);
digitalWrite(MotorRight1R, LOW);
digitalWrite(MotorRight1B, HIGH);
digitalWrite(MotorRight2R, HIGH);
digitalWrite(MotorRight2B, LOW);
delay(d * 100);
}
void turnL(int e) //左转 双轮
{
Serial.println("turnL");
//左转(快速)
digitalWrite(MotorLeft1R, LOW);
digitalWrite(MotorLeft1B, HIGH);
digitalWrite(MotorLeft2R, HIGH);
digitalWrite(MotorLeft2B, LOW);
digitalWrite(MotorRight1R, HIGH);
digitalWrite(MotorRight1B, LOW);
digitalWrite(MotorRight2R, LOW);
digitalWrite(MotorRight2B, HIGH);
delay(e * 100);
}
void stopp(int f) //停止
{
Serial.println("stopp");
//停止
digitalWrite(MotorLeft1R, LOW);
digitalWrite(MotorLeft1B, LOW);
digitalWrite(MotorLeft2R, LOW);
digitalWrite(MotorLeft2B, LOW);
digitalWrite(MotorRight1R, LOW);
digitalWrite(MotorRight1B, LOW);
digitalWrite(MotorRight2R, LOW);
digitalWrite(MotorRight2B, LOW);
delay(f * 100);
}
void back(int g) //后退
{
Serial.println("back");
digitalWrite(MotorLeft1R, LOW);
digitalWrite(MotorLeft1B, HIGH);
digitalWrite(MotorLeft2R, HIGH);
digitalWrite(MotorLeft2B, LOW);
digitalWrite(MotorRight1R, LOW);
digitalWrite(MotorRight1B, HIGH);
digitalWrite(MotorRight2R, HIGH);
digitalWrite(MotorRight2B, LOW);
delay(g * 100);
}
void toR(int v) //右平移
{
Serial.println("toR");
digitalWrite(MotorLeft1R, HIGH);
digitalWrite(MotorLeft1B, LOW);
digitalWrite(MotorLeft2R, HIGH);
digitalWrite(MotorLeft2B, LOW);
digitalWrite(MotorRight1R, LOW);
digitalWrite(MotorRight1B, HIGH);
digitalWrite(MotorRight2R, LOW);
digitalWrite(MotorRight2B, HIGH);
delay(v * 100);
}
void toL(int x) //左平移
{
Serial.println("toL");
digitalWrite(MotorLeft1R, LOW);
digitalWrite(MotorLeft1B, HIGH);
digitalWrite(MotorLeft2R, LOW);
digitalWrite(MotorLeft2B, HIGH);
digitalWrite(MotorRight1R, HIGH);
digitalWrite(MotorRight1B, LOW);
digitalWrite(MotorRight2R, HIGH);
digitalWrite(MotorRight2B, LOW);
delay(x * 100);
}
//******************************************************************************(LOOP)
void loop()
{
SL = digitalRead(SensorLeft);
SM = digitalRead(SensorMiddle);
SR = digitalRead(SensorRight);
performCommand();
}
void performCommand()
{
if (Serial.available())
{
val = Serial.read();
}
//**********************红外避障模式
if (val == 'q') //红外壁障
{
while (1)
{
val = Serial.read();
if ((digitalRead(barrier_left)==LOW) && (digitalRead(barrier_right)==LOW))
{
back(3);//后退
}
else if (digitalRead(barrier_left)==LOW)
{
turnR(3); // 右转;
}
else if (digitalRead(barrier_right)==LOW)
{
turnL(3); // 左转;
}
else
{
advance(3);//前进
}
if (val == 'a')
{
digitalWrite(MotorLeft1R, LOW);
digitalWrite(MotorLeft1B, LOW);
digitalWrite(MotorLeft2R, LOW);
digitalWrite(MotorLeft2B, LOW);
digitalWrite(MotorRight1R, LOW);
digitalWrite(MotorRight1B, LOW);
digitalWrite(MotorRight2R, LOW);
digitalWrite(MotorRight2B, LOW);
break;
}
}
}
//**********************红外避障模式2
if (val == 'p') //红外壁障
{
while (1)
{
val = Serial.read();
if ((digitalRead(barrier_left)==LOW) && (digitalRead(barrier_right)==LOW))
{
stopp(3);//停止
for(int thisNote = 0; thisNote < sizeof(melody)/sizeof(melody[0]); thisNote++)
{
// 需要根据音符类型换算音符的持续时间
int noteDuration = 1000/noteDurations[thisNote];
tone(A1, melody[thisNote], noteDuration);
// 为了能辨别出不同的音调,需要在两个音调间设置一定的延时,增加30%比较合适
int pauseBetweenNotes = noteDuration * 1.30;
delay(pauseBetweenNotes);
noTone(A1);
}
}
else if (digitalRead(barrier_left)==LOW)
{
turnR(3); // 右转;
}
else if (digitalRead(barrier_right)==LOW)
{
turnL(3); // 左转;
}
else
{
advance(3);//前进
}
if (val == 'a')
{
digitalWrite(MotorLeft1R, LOW);
digitalWrite(MotorLeft1B, LOW);
digitalWrite(MotorLeft2R, LOW);
digitalWrite(MotorLeft2B, LOW);
digitalWrite(MotorRight1R, LOW);
digitalWrite(MotorRight1B, LOW);
digitalWrite(MotorRight2R, LOW);
digitalWrite(MotorRight2B, LOW);
break;
}
}
}
//**********************寻光模式
if (val == 't')
{
while (1)
{
val = Serial.read();
if ((digitalRead(followLight_left)==LOW) && (digitalRead(followLight_right)==LOW))
{
advance(3);//前进
}
else if (digitalRead(followLight_left)==LOW)
{
turnL(3); // 左转;
}
else if (digitalRead(followLight_right)==LOW)
{
turnR(3); // 右转;
}
else
{
stopp(3);
}
if (val == 'a')
{
digitalWrite(MotorLeft1R, LOW);
digitalWrite(MotorLeft1B, LOW);
digitalWrite(MotorLeft2R, LOW);
digitalWrite(MotorLeft2B, LOW);
digitalWrite(MotorRight1R, LOW);
digitalWrite(MotorRight1B, LOW);
digitalWrite(MotorRight2R, LOW);
digitalWrite(MotorRight2B, LOW);
break;
}
}
}
//**********************寻线模式
if (val == 'd')
{
while (1)
{
val = Serial.read();
{
SL = digitalRead(SensorLeft);
SM = digitalRead(SensorMiddle);
SR = digitalRead(SensorRight);
Serial.print(SL);
Serial.print("-");
Serial.print(SM);
Serial.print("-");
Serial.println(SR);
if (SM == HIGH)//中间传感器检测到黑线 黑线为1 白为0
{
if (SL == LOW & SR == HIGH) //左白右黑, 向右转弯
{
Serial.println("BL");
right(1); // 右转;
}
else if ( SL == HIGH & SR == LOW) // 左黑右白, 向左转弯
{
Serial.println("BR");
left(1); // 左转;
}
else // 两侧为白色,前进
{
Serial.println("Bw");
advance(1); //前进;
}
}
else // 中间传感器在白色区域
{
if (SL == LOW & SR == HIGH ) // 左白右黑, 快速右转
{
Serial.println("WL");
turnR(1);
}
else if ( SL == HIGH & SR == LOW ) // 左黑右白, 快速左转
{
Serial.println("WR");
turnL(1);
}
else // 都是白色, 保护不变
{
Serial.println("ww");
}
}
}
if (val == 'a')
{
digitalWrite(MotorLeft1R, LOW);
digitalWrite(MotorLeft1B, LOW);
digitalWrite(MotorLeft2R, LOW);
digitalWrite(MotorLeft2B, LOW);
digitalWrite(MotorRight1R, LOW);
digitalWrite(MotorRight1B, LOW);
digitalWrite(MotorRight2R, LOW);
digitalWrite(MotorRight2B, LOW);
break;
}
}
}
//**********************无源蜂鸣器
if (val == 'i') //致爱丽丝
{
while (1)
{
val = Serial.read();
// 遍历整个曲子的音符
for(int thisNote = 0; thisNote < sizeof(melody)/sizeof(melody[0]); thisNote++)
{
// 需要根据音符类型换算音符的持续时间
int noteDuration = 1000/noteDurations[thisNote];
tone(A1, melody[thisNote], noteDuration);
// 为了能辨别出不同的音调,需要在两个音调间设置一定的延时,增加30%比较合适
int pauseBetweenNotes = noteDuration * 1.30;
delay(pauseBetweenNotes);
noTone(A1);
}
if (val == 'a')
{
break;
}
}
}
//蓝牙控制**********************正常遥控模式
if (val == 'f')
{ // Forward
advance(10);
}
else if (val == 'b')
{ // Backward
back(10);
}
else if (val == 'r')
{ // Right
right(10);
}
else if (val == 'l')
{ // Left
left(10);
}
else if (val == 's')
{ // Stop
stopp(10) ;
}
else if (val == 'y')
{ // Right
turnR(10);
}
else if (val == 'z')
{ // Left
turnL(10);
}
else if (val == 'v')
{ //
toR(10) ;
}
else if (val == 'x')
{ //
toL(10) ;
}
}到了这里,关于基于Arduino通过并联L298N实现四驱麦克纳姆轮巡迹小车的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!