文章来源地址https://www.toymoban.com/news/detail-428230.html
文章来源:https://www.toymoban.com/news/detail-428230.html
到了这里,关于【5. ROS机器人的运动控制】的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
这篇具有很好参考价值的文章主要介绍了【5. ROS机器人的运动控制】。希望对大家有所帮助。如果存在错误或未考虑完全的地方,请大家不吝赐教,您也可以点击"举报违法"按钮提交疑问。
文章来源地址https://www.toymoban.com/news/detail-428230.html
文章来源:https://www.toymoban.com/news/detail-428230.html
到了这里,关于【5. ROS机器人的运动控制】的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处: 如若内容造成侵权/违法违规/事实不符,请点击违法举报进行投诉反馈,一经查实,立即删除!
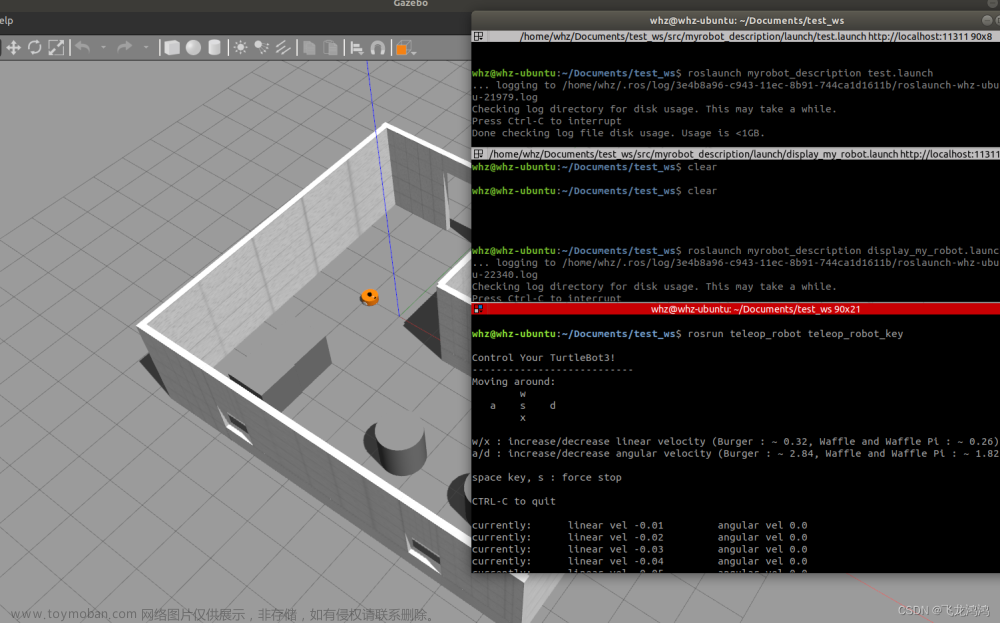
1.要想机器人小车在gazebo中运动还需要为其添加运动插件 在文章3中的my_robot2.urdf 最下边(前边)添加如下部分: 这里使用的二轮差速控制,选择对应的插件libgazebo_ros_diff_drive.so 添加上述部分,文章3中的my_robot2.urdf 更新为 --完整代码如下: 2.使用turtlebot3中的控制机器人的

网上记录Path的写入文件看了一下还挺多的,有用 yaml 作为载体文件,也有用 csv 文件的路径信息,也有用 txt 来记录当前生成的路径信息,载体不重要,反正都是记录的方式,本文主要按 yaml 的方式写入,后文中将补全其余两种方式。 其中两种方式的主要

《Modeling Identification and control of robots》 Chapter15 compliant motion control 柔性运动控制 中间会穿插一些前面的知识作为补充,具体均在目录中体现,原书中有错误的地方也均在本文中体现 14.3.1 关节空间中的PID控制 τ = K p ( q d − q ) + K d ( q ˙ d − q ˙ ) + K i ∫ t 0 1 ( q d − q ) d τ (1
作者:禅与计算机程序设计艺术 当前,物联网、云计算、人工智能和机器人技术已成为我国产业界研究热点。随着机器人的高速发展,无论是研究、制造还是服务,都受到了越来越多的关注。同时,随着大数据、IoT(Internet of Things)技术的广泛应用,机器人应用也被迅速推向

在ROS机器人应用中,实现机器人多目标点导航是非常常见的需求。本文将介绍如何使用ROS和actionlib来实现机器人的多目标点导航,目标点信息将被记录在YAML文件中。 我们可以通过使用MoveBaseAction来实现机器人的导航功能。MoveBaseAction是一个ROS中的action类型,它提供了控制机器

本博客专栏将从理论到实践进行全面讲解,从机器人运动控制的基础理论到代码实现,读者将能够全面了解机器人运动控制的关键环节。本专栏从数学公式的推理,到代码实现的详细阐述,读者将能够更好地理解和应用机器人运动控制的相关知识。通过实例、图像、代码和解
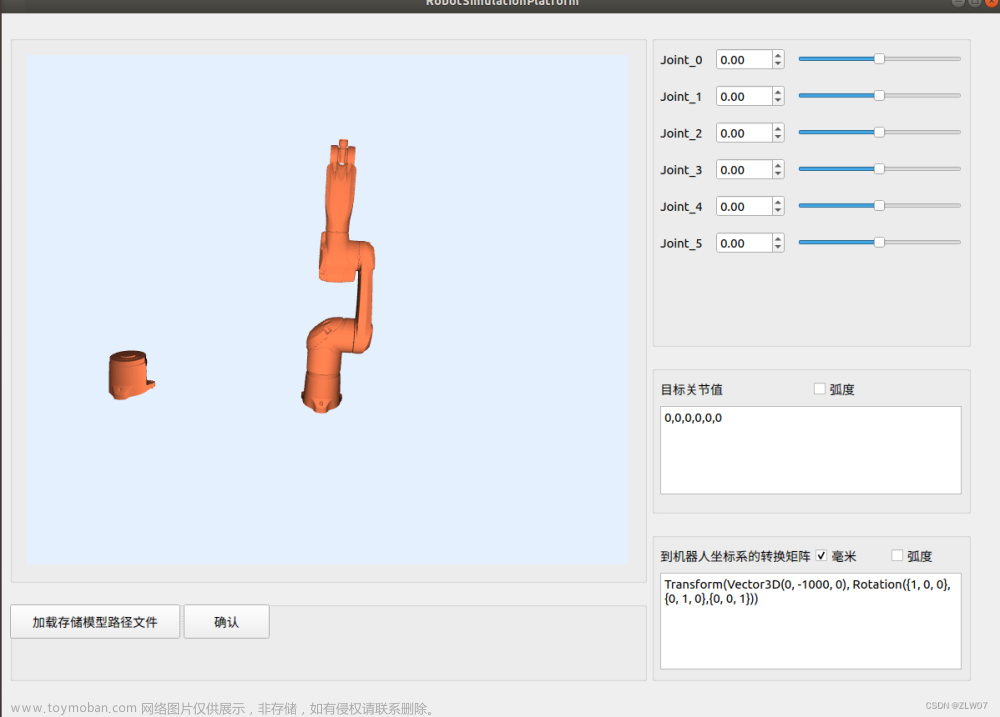
本工程借助于clion配置的qt环境,同时依赖eigen tinyxml2等开源库,也借鉴了博客上一些文章,具体哪些忘记了,十分抱歉。本工程仅供参考。机械臂模型为史陶比尔官网的TX2-60L-HB。可以去那下载对应的stp文件。 最终图: 通过鼠标中键控制旋转 缩放,配合ctrl进行平移。加载

实验室新购置了一辆机器人,师兄们做好了键盘控制机器人运行,但总拿着电脑太麻烦了,就让我做一个手柄控制机器人,随便实践一下ros开发能力. 首先尝试用手柄控制海龟. 主要参考文章:文章一,文章二,文章三 一.手柄连接测试 首先测试手柄能不能正常连接到电脑

BCI是一种特殊的信息交换系统,它使大脑能够直接与外部环境互动,而不依赖于大脑的外周神经系统和人体的运动系统。随着BCI的快速发展,对于思维正常但患有神经系统疾病或严重残疾的患者,BCI可使他们重新获得锻炼或与环境沟通的能力,提高生活质量。对于健康人群来
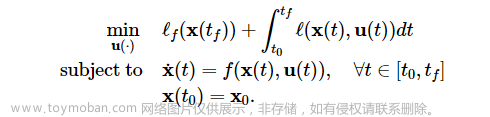
“ 运动控制技术的进步使得足式机器人的运动能力更强,而近来轨迹优化作为主流学术研究方向,能够为足式机器人运动控制的发展提供可能的指引。本期技术干货,我们邀请到了小米工程师 徐喆 ,向我们介绍足式机器人运动控制的发展方向——轨迹优化。 ” 一、前言 足



