一、硬件
STM32C8T6、STLINK下载器
Driver8833:TI公司的DRV8833是双桥马达驱动器解决方案,包括有两个H桥驱动器,可驱动两个DC电刷马达,或一个步进马达, 螺线管和其它电感负载. DRV8833具有PWM绕组电流调整/限制,H桥的输出电流1.5A RMS,2A峰值,工作电压2.7V-10.8V。
编码电机
二、Driver8833的使用
模块供电2.7-10.8v,芯片中共有两个全H桥,最多可以同时驱动两个直流电机,内置过热保护和用户可调的限流保护电路。
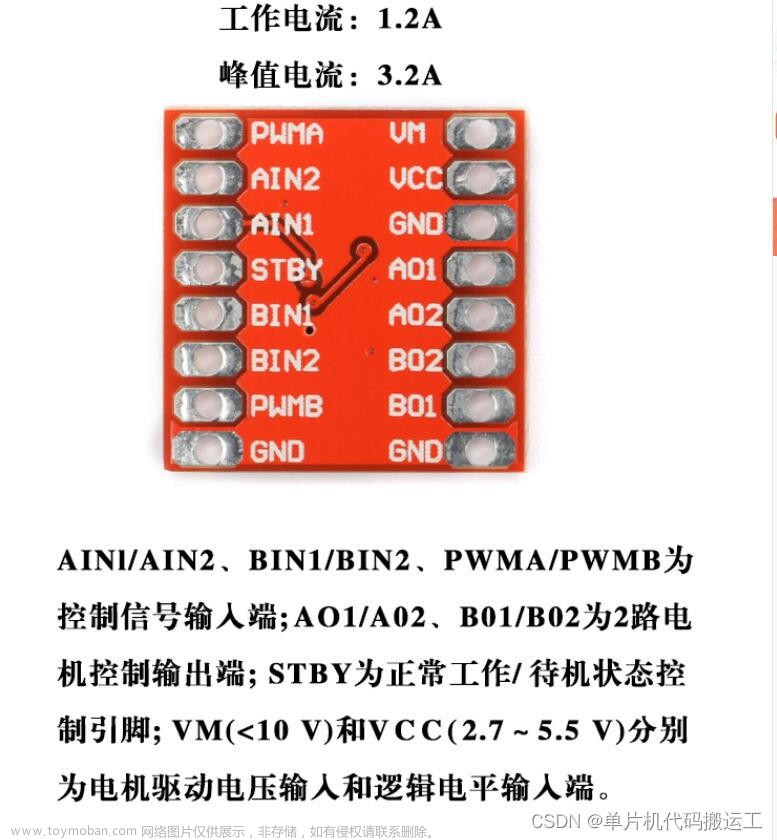
引脚说明:
SLEEP:睡眠模式控制,高电平使能芯片,低电平关闭芯片;
UTL:报警端,过热和电流过大时输出低电平,默认不用;
输入IN1、IN2控制输出OUT1、OUT2,第一路H桥;
输入IN3、IN4控制输出OUT3、OUT4,第二路H桥;
GND:与单片机共地。
1.H桥驱动逻辑
| IN1 | IN2 | OUT1 | OUT2 | 状态 |
|---|---|---|---|---|
| 0 | 0 | Z | Z | 慢速运行/快速衰减 |
| 1 | 0 | 1 | 0 | 正转 |
| 0 | 1 | 0 | 1 | 反转 |
| 1 | 1 | 0 | 0 | 制动/慢速衰减 |
输入为相同电平电机停止,相异控制电机正反转。
场效应管(FET)的两种电流衰减方法-----快速衰减和慢速衰减,衰减指的是电流衰减的速度,并且与电机的停止速度成反比。
硬件相关知识参考这篇文章:https://blog.csdn.net/oXiaoXue123456789/article/details/110260343
2.PWM控制逻辑
| IN1 | IN2 | 状态 |
|---|---|---|
| PWM | 0 | 正转,快速衰减 |
| PWM | 1 | 反转,慢速衰减 |
| 1 | PWM | 正转,慢速衰减 |
| 0 | PWM | 反转,快速衰减 |
输入为一个低电平,一个PWM时,正反转、快衰减,占空比越大,转速越快。
输入为一个高电平,一个PWM时,正反转、慢衰减,占空比越小,转速越快。
三、主要程序:
motor.c
#include "motor.h"
/********************************************
* @brief 电机GPIO初始化
* @param void
* @retval void
*********************************************/
void Motor_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_6|GPIO_Pin_7;//PB6 PB7作为方向控制
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_ResetBits(GPIOB, GPIO_Pin_6|GPIO_Pin_7);
}
pwm.c
#include "stm32f10x.h"
#include "pwm.h"
/********************************************
* @brief TIM2 PWM初始化
* @param arr
* psc
* @retval void
*********************************************/
void TIM2_PWM_Init(u16 arr, u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure; //定义引脚初始化结构体
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStrue; //定义定时中断结构体
TIM_OCInitTypeDef TIM_OCInitTypeStrue; //定义PWM输出结构体
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIOA时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //使能通用定时器2时钟
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_1|GPIO_Pin_2;//定时器引脚PA1 CH2 PA2 CH3
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //复用推挽输出模式,A0引脚复用
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //引脚输出速度为
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化引脚GPIO
TIM_TimeBaseInitStrue.TIM_Period=arr; //计数周期
TIM_TimeBaseInitStrue.TIM_Prescaler=psc; //预分频系数
TIM_TimeBaseInitStrue.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseInitStrue.TIM_ClockDivision=TIM_CKD_DIV1; //一般不使用,默认TIM_CKD_DIV1
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStrue); //初始化定时器TIM2
TIM_OCInitTypeStrue.TIM_OCMode=TIM_OCMode_PWM1; //PWM模式1,定时器计数小于 TIM_Pulse时,输出有效电平
TIM_OCInitTypeStrue.TIM_OCPolarity=TIM_OCNPolarity_High; //输出有效电平为高电平
TIM_OCInitTypeStrue.TIM_OutputState=TIM_OutputState_Enable; //使能PWM输出
TIM_OCInitTypeStrue.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
TIM_OC2Init(TIM2, &TIM_OCInitTypeStrue); //初始化定时器2通道2
TIM_OCInitTypeStrue.TIM_OCMode=TIM_OCMode_PWM1;//PWM模式1,时器计数小于TIM_Puls输出有效电平
TIM_OCInitTypeStrue.TIM_OCPolarity=TIM_OCNPolarity_High; //输出有效电平为高电平
TIM_OCInitTypeStrue.TIM_OutputState=TIM_OutputState_Enable; //使能PWM输出
TIM_OCInitTypeStrue.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
TIM_OC3Init(TIM2, &TIM_OCInitTypeStrue); //初始化定时器2通道3
TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Disable); //CH2预装载使能
TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Disable); //CH3预装载使能
TIM_ARRPreloadConfig(TIM2, ENABLE); //预装载使能
TIM_Cmd(TIM2, ENABLE); //使能定时器TIM2
}
main.c
#include "stm32f10x.h"
#include "main.h"
#include "motor.h"
#include "pwm.h"
int main(void)
{
TIM2_PWM_Init(99,0);//720khz
Motor_Init();
while(1)
{
/*IN1---1 IN2---PWM 正转 慢速衰减 占空比越小速度越快*/
GPIO_SetBits(GPIOB, GPIO_Pin_6);
TIM_SetCompare2(TIM2, 40);
/*IN1---PWM IN2---0 正转 快速衰减 占空比越大速度越快*/
GPIO_ResetBits(GPIOB, GPIO_Pin_7);
TIM_SetCompare3(TIM2, 90);
}
}
四、现象总结
调速过程中PWM频率过低会产生异响,转速缓慢,增大频率后消失。目前只是对driver8833进行了一个初步的使用。文章来源:https://www.toymoban.com/news/detail-429174.html
 文章来源地址https://www.toymoban.com/news/detail-429174.html
文章来源地址https://www.toymoban.com/news/detail-429174.html
到了这里,关于Driver8833电机驱动模块的使用(STM32为主控)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!