👉 【Simulink】基于FCS-MPC的三相并网逆变器控制
上一篇博客介绍了FCS-MPC的基本操作,并且以三相并网逆变器为控制对象进行了Simulink仿真。
但实际仿真中没有考虑补偿延时。本篇博客将讨论为什么要考虑延时并进行补偿,最后对此仿真验证。
1. 传统FCS-MPC
模型预测电流控制步骤:
1)测量负载电流;
2) 针对所有可能的开关状态预测下一采样时刻的负载电流;
3) 评估每个预测的成本函数;
4) 选择使代价函数最小化的切换状态;
5) 应用新的开关状态。
对于三相并网逆变器,代价函数为:
g
i
=
∣
i
α
∗
(
k
+
1
)
−
i
α
p
(
k
+
1
)
∣
+
∣
i
β
∗
(
k
+
1
)
−
i
β
p
(
k
+
1
)
∣
g_i = |i_\alpha^*(k+1)-i_\alpha^p(k+1)|+|i_\beta^*(k+1)-i_\beta^p(k+1)|
gi=∣iα∗(k+1)−iαp(k+1)∣+∣iβ∗(k+1)−iβp(k+1)∣
g i g_i gi 的下标 i 代表开关状态顺序(1-8), i α ∗ i_\alpha^* iα∗ 和 i β ∗ i_\beta^* iβ∗ 的下标 α , β \alpha,\beta α,β 为三相负载电流的 α , β \alpha,\beta α,β 分量(经过Clarke变换),上标 * 表示参考值,上标 p 表示预测值。
2. 为什么要考虑延时补偿?
图源:《Delay Compensation in Model Predictive Current Control of a Three-Phase Inverter》
a. 无延迟:计算时间为零(理想情况下):

在 k 时刻测量电流,并且立即计算并应用最佳开关状态,在 k+1 时刻达到使误差最小化的切换状态。
(图中 k 到 k+1 时刻共有3条
i
β
p
i_\beta^p
iβp,其中最上面的一条离
i
β
p
i_\beta^p
iβp (水平直线)最近,所以选择最上面的
i
β
p
i_\beta^p
iβp 对应的开关状态,在 k+1 时刻应用)
b. 有延迟且无补偿:计算时间长(实际情况):


如果计算时间比采样时间长,则在测量电流的瞬间与应用新开关状态的瞬间之间会有延迟。在这两个瞬间之间的间隔期间,将继续应用先前的切换状态。根据 k 处的测量值选择的电压矢量将在 k+1 之后继续应用,从而使负载电流远离参考值。由于该延迟,负载电流将围绕其参考值振荡,从而增加电流纹波。
c. 带延迟和补偿:计算时间长(实际情况):

使用在 k 时刻处测量的电流 i(k) 和 施加的开关状态x_opt 来估计在 k+1 时刻处的负载电流的值,并以在 k+1 时刻处估计的负载电流的值预测 k+2 时刻的负载电流,对应的开关状态在 k+1 ~ k+2 时刻应用。
控制算法被修改如下:
1) 负载电流的测量;
2) 切换状态的应用(在前一个间隔中计算);
3) 考虑所施加的开关状态,估计在时间 k+1 处的电流值;
4) 针对所有可能的开关状态预测下一个采样时刻 k+2 的负载电流;
5) 对每个预测的成本函数进行评估;
6) 选择使成本函数最小化的切换状态。

代价函数从
g
i
=
∣
i
α
∗
(
k
+
1
)
−
i
α
p
(
k
+
1
)
∣
+
∣
i
β
∗
(
k
+
1
)
−
i
β
p
(
k
+
1
)
∣
g_i = |i_\alpha^*(k+1)-i_\alpha^p(k+1)|+|i_\beta^*(k+1)-i_\beta^p(k+1)|
gi=∣iα∗(k+1)−iαp(k+1)∣+∣iβ∗(k+1)−iβp(k+1)∣
变成
g
i
=
∣
i
α
∗
(
k
+
2
)
−
i
α
p
(
k
+
2
)
∣
+
∣
i
β
∗
(
k
+
2
)
−
i
β
p
(
k
+
2
)
∣
g_i = |i_\alpha^*(k+2)-i_\alpha^p(k+2)|+|i_\beta^*(k+2)-i_\beta^p(k+2)|
gi=∣iα∗(k+2)−iαp(k+2)∣+∣iβ∗(k+2)−iβp(k+2)∣
以此预测电流
i
α
p
(
k
+
1
)
,
i
β
p
(
k
+
1
)
i_\alpha^p(k+1), i_\beta^p(k+1)
iαp(k+1),iβp(k+1)
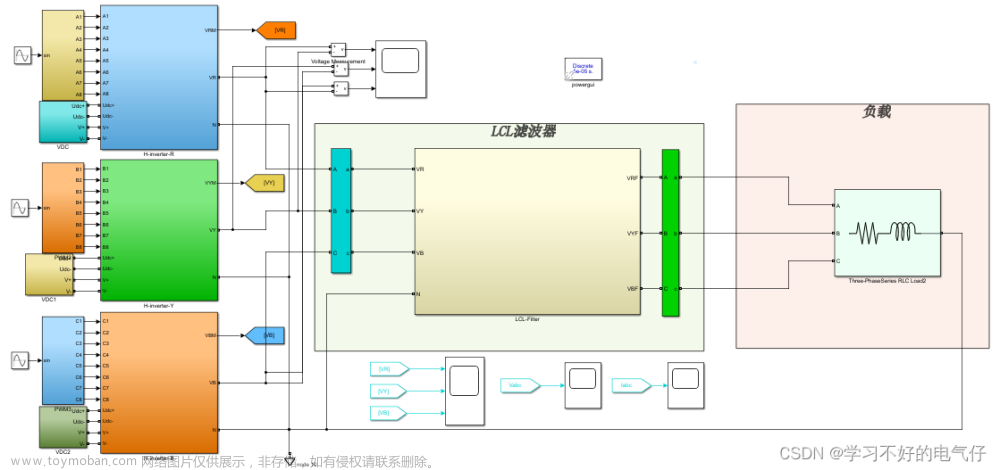
3. 仿真
原理图

注意开关信号作用前加了延时模块,模拟一拍延时的情况。
Matlab Function代码
未加延时补偿:
function [S1,S2,S3] = fcn(Vdc, ea, eb, ia, ib, iar, ibr, R, L, Ts)
v0 = 0;
v1 = 2/3*Vdc;
v2 = 1/3*Vdc + 1j/sqrt(3)*Vdc;
v3 = -1/3*Vdc + 1j/sqrt(3)*Vdc;
v4 = -2/3*Vdc;
v5 = -1/3*Vdc - 1j/sqrt(3)*Vdc;
v6 = 1/3*Vdc - 1j/sqrt(3)*Vdc;
v7 = 0;
v = [v0 v1 v2 v3 v4 v5 v6 v7];
states = [0 0 0; 1 0 0; 1 1 0; 0 1 0; 0 1 1; 0 0 1; 1 0 1; 1 1 1];
g = zeros(1,8);
ik_ref = iar + 1j*ibr;
ik = ia + 1j*ib;
ek = ea + 1j*eb;
for i = 1:8
ik1 = (1 - R*Ts/L)*ik + Ts/L*(v(i)-ek);
g(i) = abs(real(ik_ref - ik1)) + abs(imag(ik_ref - ik1));
end
[~,x_opt] = min(g);
S1 = logical(states(x_opt,1));
S2 = logical(states(x_opt,2));
S3 = logical(states(x_opt,3));
加延时补偿:
function [S1,S2,S3] = fcn(Vdc, ea, eb, ia, ib, iar, ibr, R, L, Ts)
persistent x_opt
if isempty(x_opt)
x_opt = 1;
end
v0 = 0;
v1 = 2/3*Vdc;
v2 = 1/3*Vdc + 1j/sqrt(3)*Vdc;
v3 = -1/3*Vdc + 1j/sqrt(3)*Vdc;
v4 = -2/3*Vdc;
v5 = -1/3*Vdc - 1j/sqrt(3)*Vdc;
v6 = 1/3*Vdc - 1j/sqrt(3)*Vdc;
v7 = 0;
v = [v0 v1 v2 v3 v4 v5 v6 v7];
states = [0 0 0; 1 0 0; 1 1 0; 0 1 0; 0 1 1; 0 0 1; 1 0 1; 1 1 1];
g = zeros(1,8);
ik_ref = iar + 1j*ibr;
ik = ia + 1j*ib;
ek = ea + 1j*eb;
ik1 = (1 - R*Ts/L)*ik + Ts/L*(v(x_opt)-ek);
for i = 1:8
ik2 = (1 - R*Ts/L)*ik1 + Ts/L*(v(i)-ek);
g(i) = abs(real(ik_ref - ik2)) + abs(imag(ik_ref - ik2));
end
[~,x_opt] = min(g);
S1 = logical(states(x_opt,1));
S2 = logical(states(x_opt,2));
S3 = logical(states(x_opt,3));
仿真结果
未加延时补偿负载电流:
负载电流THD:

加延时补偿负载电流:

负载电流THD:

THD降低了,从原来的4.63%降到1.95%
4. 拓展



有的论文提到需要对电流参考值和电网电压进行估计(前文因变化不大而忽略),可用矢量角的方法进行估计,估计之后THD降低0.1%左右。
资源下载
仿真文件资源下载文章来源:https://www.toymoban.com/news/detail-429839.html
参考:
[1] 郑文帅. 三相并网逆变器有限控制集模型预测控制研究[D].辽宁工程技术大学,2021.DOI:10.27210/d.cnki.glnju.2021.000395.
[2] 赵昱诚.并网逆变器模型预测电流控制策略研究[D].辽宁工程技术大学,2022.DOI:10.27210/d.cnki.glnju.2022.000484
[3] P. C, J. R, C. S, et al. Delay Compensation in Model Predictive Current Control of a Three-Phase Inverter[J]. IEEE Transactions on Industrial Electronics, 2012,59(2): 1323-1325.
[4] 对同一个三相逆变器使用FCS-MPC的延迟补偿的两种方法
[5] 朱守玉. 基于事件触发机制的并网逆变器模型预测电流控制[D]. 西安理工大学电气工程;电力电子与电力传动, 2021.文章来源地址https://www.toymoban.com/news/detail-429839.html
到了这里,关于【五一创作】【Simulink】采用延时补偿的三相并网逆变器FCS-MPC的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!