1.1 前言
在使用I2C通信时,一般会用到软件模拟I2C。目前网络上能搜索到的软件模拟I2C一般都是模拟I2C主机,很少有模拟I2C从机的例程。由于I2C主机在进行数据收发时,有明确的可预见性,也就是主机明确知道什么时候要进行数据的收发操作,而且I2C的同步时钟信号也是由主机产生的,所以实现起来相对来说比较简单。而I2C从机的通信受制于主机,即什么时候需要进行数据的收发都是由主机发起的,数据收发的发起时机具有随机性。由于实际使用时,MCU的固件还会执行其他的操作,所以如果单纯使用软件查询的方法来判断I2C通信的起始信号不太现实。这里提供一种软件模拟I2C从机的实现方法,考虑使用GPIO中断的方法来及时接收I2C通信的起始信号,并进行数据的收发。
1.2 测试平台
这里使用的开发环境和相关硬件如下。
- 操作系统:Ubuntu 20.04.2 LTS x86_64(使用uname -a命令查看)
- 集成开发环境(IDE):Eclipse IDE for Embedded C/C++ Developers,Version: 2021-06 (4.20.0)
- 编译器:arm-none-eabi-gcc (GNU Arm Embedded Toolchain 10-2020-q4-major) 10.2.1 20201103 (release)
- 硬件开发板:STM32F429I-DISCO
- 本文对应的例程代码链接如下。
STM32软件模拟I2C从机的例程代码-单片机文档类资源-CSDN下载
1.3 软件模拟I2C从机实现方法
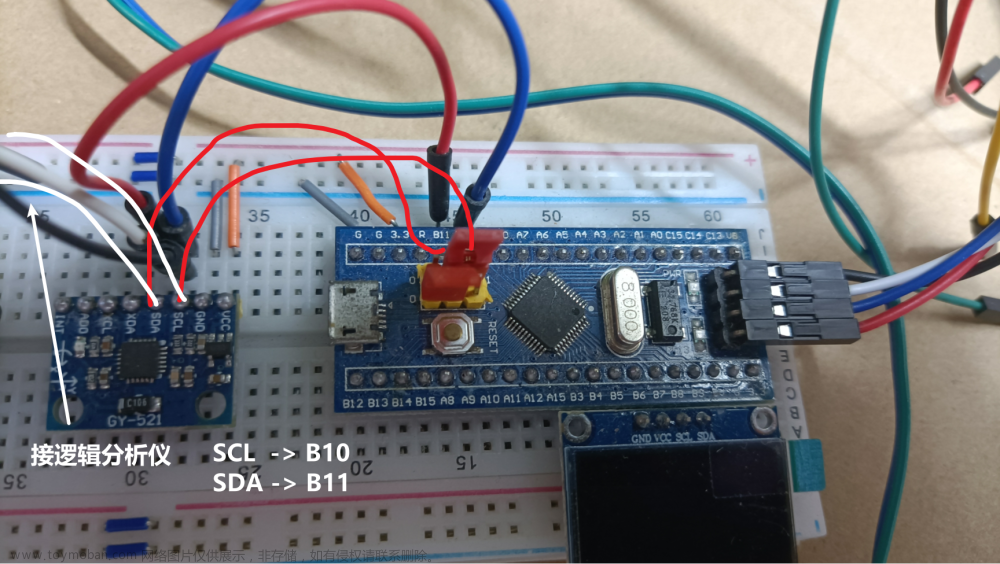
这里结合开发板STM32F429I-DISCO上的STM32F429ZI的单片机来演示软件模拟I2C从机的实现方法。
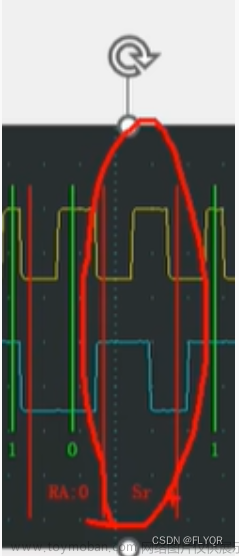
I2C通信的时序图如下图1所示。

图1 I2C通信时序图
I2C通信的时序中关键的几个点如下。
- START和ReSTART信号:用于标识I2C通信的开始,时序特点是SCL为高电平的时候,SDA从高电平变成低电平。
- STOP信号:用于标识I2C通信的结束,时序特点是SCL为高电平的时候,SDA从低电平变成高电平。
- 应答信号:I2C通信每传输完8个比特的数据位后,紧接着需要传输应答标志位,当该位为0时,是ACK应答信号,该位为1时,是NACK无应答信号。应答信号在SCL的第9个时钟周期的位置。
- 数据采集时刻:I2C通信的数据在SCL的上升沿进行采集确认,所以在SCL的高电平期间,数据必须保持不变,防止数据采集出错。当然,START信号和STOP信号的时序在SCL高电平期间是特殊情况,具有专门的含义。
- 数据更新时刻:I2C通信的数据更新需要在SCL为低电平的时候进行。
由于各个关键点基本都发生在SCL或SDA的上升沿或者下降沿的地方,所以可以将用于模拟I2C通信引脚的GPIO口配置成边沿中断,这样就可以通过中断实时抓取边沿信号,并在中断中进行及时的数据处理。使用GPIO的边沿中断来模拟I2C从机的好处是可以实时获取到START和STOP信号,I2C主机发过来的数据可以通过中断得到及时处理,而且程序主流程无需关心模拟I2C从机的相关处理,可以处理其他事务。
因为是I2C从机,所以SCL引脚直接固定成输入引脚即可,而SDA信号由于是双向的,所以需要根据I2C通信中的各个状态来设置输入或输出方向。另外,由于GPIO中断只在GPIO配置成输入时才会产生,所以默认情况下,SDA必须设置成输入引脚。
程序的具体设计思路如下。
- 将SCL和SDA引脚设置成GPIO的边沿中断模式,默认为输入引脚。I2C通信状态机设置成默认的IDLE状态。SCL的中断用于处理数据的收发,SDA的中断只用于START/ReSTART/STOP这些特殊信号的判断。
- SDA引脚中断处理思路:发生下降沿中断,并且SCL为高电平,则收到START信号,状态机更新成START状态;发生上升沿中断,并且SCL为高电平,则收到STOP信号,紧接着I2C通信就应该处于空闲状态,所以这里直接将状态机设置成IDLE状态。
- SCL引脚中断处理思路:
A. 发生下降沿中断时
A1. 如果状态机为START状态,则I2C通信正式开始,准备开始接收设备地址,状态机更新成DATA状态。
A2. 如果状态机为DATA状态,SCL下降沿计数小于8时,如果是主机读取数据,则更新SDA的位数据输出。SCL下降沿计数等于8时,进入应答阶段,状态机更新成ACK状态;如果是主机写入数据,并且是设备地址数据,则判断设备地址是否匹配,如果设备地址匹配,则将SDA设置成输出,并输出ACK信号,否则如果地址不匹配,则SDA保持为输入状态,不输出ACK信号;如果是主机读取数据,将SDA设置成输入,准备接收主机的应答信号。
A3. 如果状态机为ACK状态,这时应答信号已经传输完毕,状态机更新成DATA状态,准备继续接收或发送数据。如果是主机写入数据,将SDA设置成输入,继续接收后续数据;如果是主机读取数据,将SDA设置成输出,继续发送后续数据。
A4. 如果状态机为NACK状态,说明紧接着I2C通信将停止或重新启动,准备接收STOP或者ReSTART信号,所以需要将SDA设置成输入。此时状态机状态保持不变。
B. 发生上升沿中断时
B1. 如果状态机为DATA状态,I2C通信处于数据阶段,如果是主机写入数据,则采集主机通过SDA发送过来的位数据。
B2. 如果状态机为ACK状态,I2C通信处于应答阶段,如果是主机读取数据,则采集主机的应答信号,如果主机应答信号为1,说明主机发送了NACK的应答,状态机需要更新成NACK状态,准备接收停止或重新启动信号。
1.4 软件模拟I2C从机的代码实现
根据上面的程序思路,可以开始进行程序代码的设计,步骤如下。
1)设计I2C从机通信对应的结构体,I2C通信状态定义,I2C通信相关的宏定义的声明。对应的头文件代码如下。
#ifndef __SW_SLAVE_I2C_H_
#define __SW_SLAVE_I2C_H_
#ifdef __cplusplus
extern "C" {
#endif
#include "stm32f4xx_hal.h"
#define SW_SLAVE_ADDR 0xA2
#define SW_SLAVE_SCL_CLK_EN() __HAL_RCC_GPIOB_CLK_ENABLE()
#define SW_SLAVE_SDA_CLK_EN() __HAL_RCC_GPIOB_CLK_ENABLE()
#define SW_SLAVE_SCL_PRT GPIOB
#define SW_SLAVE_SCL_PIN GPIO_PIN_6
#define SW_SLAVE_SDA_PRT GPIOB
#define SW_SLAVE_SDA_PIN GPIO_PIN_7
#define GPIO_MODE_MSK 0x00000003U
#define I2C_STA_IDLE 0
#define I2C_STA_START 1
#define I2C_STA_DATA 2
#define I2C_STA_ACK 3
#define I2C_STA_NACK 4
#define I2C_STA_STOP 5
#define I2C_READ 1
#define I2C_WRITE 0
#define GPIO_DIR_IN 0
#define GPIO_DIR_OUT 1
#define SET_SCL_DIR(Temp, InOut) \
Temp = SW_SLAVE_SCL_PRT->MODER; \
Temp &= ~(GPIO_MODER_MODER6); \
Temp |= ((InOut & GPIO_MODE_MSK) << (6 * 2U)); \
SW_SLAVE_SCL_PRT->MODER = temp;
#define SET_SDA_DIR(Temp, InOut) \
Temp = SW_SLAVE_SDA_PRT->MODER; \
Temp &= ~(GPIO_MODER_MODER7); \
Temp |= ((InOut & GPIO_MODE_MSK) << (7 * 2U)); \
SW_SLAVE_SDA_PRT->MODER = Temp;
#define CLR_SDA_PIN() (SW_SLAVE_SDA_PRT->BSRR = SW_SLAVE_SDA_PIN << 16)
#define SET_SDA_PIN() (SW_SLAVE_SDA_PRT->BSRR = SW_SLAVE_SDA_PIN)
typedef struct _SwSlaveI2C_t
{
uint8_t State; // I2C通信状态
uint8_t Rw; // I2C读写标志:0-写,1-读
uint8_t SclFallCnt; // SCL下降沿计数
uint8_t Flag; // I2C状态标志,BIT0:0-地址无效,1-地址匹配
uint32_t StartMs; // I2C通信起始时间,单位ms,用于判断通信是否超时
uint8_t* RxBuf; // 指向接收缓冲区的指针
uint8_t* TxBuf; // 指向发送缓冲区的指针
uint8_t RxIdx; // 接收缓冲区数据写入索引,最大值255
uint8_t TxIdx; // 发送缓冲区数据读取索引,最大值255
}SwSlaveI2C_t;
extern SwSlaveI2C_t SwSlaveI2C;
void InitSwSlaveI2C(void);
void I2cGpioIsr(void);
void CheckSwSlaveI2cTimeout(void);
#ifdef __cplusplus
}
#endif
#endif /* __SW_TIMER_H_ */2)I2C通信引脚SCL/SDA对应的GPIO的初始化。这里使用PB6/PB7引脚。代码如下。
void InitSwSlaveI2C(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* Enable I2C GPIO clock */
SW_SLAVE_SCL_CLK_EN();
SW_SLAVE_SDA_CLK_EN();
/* Configure SCL GPIO pin */
GPIO_InitStructure.Pin = SW_SLAVE_SCL_PIN;
GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_OD;
GPIO_InitStructure.Pull = GPIO_PULLUP;
GPIO_InitStructure.Speed = GPIO_SPEED_FAST;
HAL_GPIO_Init(SW_SLAVE_SCL_PRT, &GPIO_InitStructure);
/* Configure SDA GPIO pin */
GPIO_InitStructure.Pin = SW_SLAVE_SDA_PIN;
HAL_GPIO_Init(SW_SLAVE_SDA_PRT, &GPIO_InitStructure);
/* Configure SCL GPIO pin as input interruption with pull up */
GPIO_InitStructure.Pin = SW_SLAVE_SCL_PIN;
GPIO_InitStructure.Mode = GPIO_MODE_IT_RISING_FALLING;
HAL_GPIO_Init(SW_SLAVE_SCL_PRT, &GPIO_InitStructure);
/* Configure SDA GPIO pin as input interruption with pull up */
GPIO_InitStructure.Pin = SW_SLAVE_SDA_PIN;
HAL_GPIO_Init(SW_SLAVE_SDA_PRT, &GPIO_InitStructure);
/* Enable and set EXTI Line9_5 Interrupt to the highest priority */
HAL_NVIC_SetPriority(EXTI9_5_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(EXTI9_5_IRQn);
}3)由于SCL/SDA引脚被设置成中断引脚,需要实现GPIO的中断处理函数。中断处理函数中已经包含了软件模拟I2C从机的所有功能。代码如下。其中EXTI9_5_IRQHandler为STM32外部line9-5中断的入口函数,在该入口函数中调用模拟I2C从机的GPIO口中断处理函数I2cGpioIsr()。
void EXTI9_5_IRQHandler(void)
{
I2cGpioIsr();
}
void I2cGpioIsr(void)
{
uint32_t temp;
// 处理SCL的上下沿中断
if(__HAL_GPIO_EXTI_GET_IT(SW_SLAVE_SCL_PIN) != RESET)
{
__HAL_GPIO_EXTI_CLEAR_IT(SW_SLAVE_SCL_PIN);
// 更新通信起始时间
SwSlaveI2C.StartMs = HAL_GetTick();
// SCL的下降沿事件处理,此时需要更新要传输的数据
if((SW_SLAVE_SCL_PRT->IDR & SW_SLAVE_SCL_PIN) == (uint32_t)GPIO_PIN_RESET)
{
switch(SwSlaveI2C.State)
{
case I2C_STA_START: // 起始信号的下降沿,初始化相关参数并转到接收比特数据状态
SwSlaveI2C.SclFallCnt = 0;
SwSlaveI2C.RxIdx = 0;
SwSlaveI2C.TxIdx = 0;
SwSlaveI2C.Flag = 0; // 默认地址不匹配
SwSlaveI2C.RxBuf[SwSlaveI2C.RxIdx] = 0;
SwSlaveI2C.Rw = I2C_WRITE; // 第1字节为设备地址,一定是写入
SwSlaveI2C.State = I2C_STA_DATA;
break;
case I2C_STA_DATA:
SwSlaveI2C.SclFallCnt++;
if(8 > SwSlaveI2C.SclFallCnt)
{
// 如果是主机读取数据,则在SCL低电平时更新比特数据
if(SwSlaveI2C.Rw == I2C_READ)
{
if(SwSlaveI2C.TxBuf[SwSlaveI2C.TxIdx] & (1 << (7 - SwSlaveI2C.SclFallCnt)))
{
SET_SDA_PIN();
}
else
{
CLR_SDA_PIN();
}
}
}
else if(8 == SwSlaveI2C.SclFallCnt)
{
if(SwSlaveI2C.Rw == I2C_WRITE)
{
// 从第一个地址字节中获取读写标志位,并判断地址是否匹配
if(SwSlaveI2C.RxIdx == 0)
{
if((SwSlaveI2C.RxBuf[0] & 0xFE) == SW_SLAVE_ADDR)
{
SwSlaveI2C.Flag = 1; // 地址匹配
SwSlaveI2C.Rw = SwSlaveI2C.RxBuf[0] & 0x01;
}
}
if(SwSlaveI2C.Flag)
{
// 如果是主机写入数据,且地址匹配,则接收完8比特数据后,需要发送ACK信号进行应答
SET_SDA_DIR(temp, GPIO_DIR_OUT);
CLR_SDA_PIN();
}
}
else
{
// 如果是主机读取数据,需要将SDA设置成输入以便判断应答标志位状态
SET_SDA_DIR(temp, GPIO_DIR_IN);
// 如果是主机读取数据,准备发送下一个字节的数据
SwSlaveI2C.TxIdx++;
}
// 接收或发送完8比特数据后,准备发送或接收应答信号
SwSlaveI2C.State = I2C_STA_ACK;
}
break;
case I2C_STA_ACK:
SwSlaveI2C.SclFallCnt = 0;
if(SwSlaveI2C.Rw == I2C_WRITE)
{
// 如果是主机写入数据,且ACK发送完毕,则SDA设置成输入,继续接收数据
SET_SDA_DIR(temp, GPIO_DIR_IN);
SwSlaveI2C.RxIdx++;
SwSlaveI2C.RxBuf[SwSlaveI2C.RxIdx] = 0;
}
else
{
// 如果是主机读取数据,且ACK接收完毕,则SDA设置成输出,继续发送数据
SET_SDA_DIR(temp, GPIO_DIR_OUT);
if(SwSlaveI2C.TxBuf[SwSlaveI2C.TxIdx] & 0x80)
{
SET_SDA_PIN();
}
else
{
CLR_SDA_PIN();
}
}
SwSlaveI2C.State = I2C_STA_DATA;
break;
case I2C_STA_NACK: // 如果收到了NACK,则后面将是STOP或者ReSTART信号,需要将SDA设置成输入
SwSlaveI2C.SclFallCnt = 0;
SET_SDA_DIR(temp, GPIO_DIR_IN);
break;
}
}
// SCL的上升沿事件处理,此时需要采集数据,而且在数据阶段,SCL高电平时数据必须保持不变
else
{
switch(SwSlaveI2C.State)
{
case I2C_STA_DATA: // 数据阶段,如果是主机写入数据,则采集比特数据
if((I2C_WRITE == SwSlaveI2C.Rw) && (8 > SwSlaveI2C.SclFallCnt))
{
if(SW_SLAVE_SDA_PRT->IDR & SW_SLAVE_SDA_PIN)
{
SwSlaveI2C.RxBuf[SwSlaveI2C.RxIdx] |= (1 << (7 - SwSlaveI2C.SclFallCnt));
}
}
break;
case I2C_STA_ACK: // 应答阶段,如果是主机读取数据,则判断ACK/NACK信号,默认状态是ACK
if((SwSlaveI2C.Rw == I2C_READ) && (SW_SLAVE_SDA_PRT->IDR & SW_SLAVE_SDA_PIN))
{
SwSlaveI2C.State = I2C_STA_NACK;
}
break;
}
}
}
else if(__HAL_GPIO_EXTI_GET_IT(SW_SLAVE_SDA_PIN) != RESET)
{
__HAL_GPIO_EXTI_CLEAR_IT(SW_SLAVE_SDA_PIN);
if((SW_SLAVE_SDA_PRT->IDR & SW_SLAVE_SDA_PIN) == (uint32_t)GPIO_PIN_RESET)
{
// SCL为高电平时,SDA从高变低,说明是起始信号
if(SW_SLAVE_SCL_PRT->IDR & SW_SLAVE_SCL_PIN)
{
SwSlaveI2C.State = I2C_STA_START;
}
}
else
{
// SCL为高电平时,SDA从低变高,说明是停止信号,一次I2C通信结束,直接将状态设置成空闲
if(SW_SLAVE_SCL_PRT->IDR & SW_SLAVE_SCL_PIN)
{
SwSlaveI2C.State = I2C_STA_IDLE;
}
}
}
}4)为了确保模拟I2C从机通信的可靠性,额外设计了I2C通信超时处理函数。在I2C通信进行的过程中,如果通信出现了中断,则通过超时判断来重置I2C从机状态,确保出现通信异常时可以从异常状态中自动恢复。该函数需要在主流程中调用。代码如下。
void CheckSwSlaveI2cTimeout(void)
{
uint32_t TimeMs, TimeCurMs;
if(SwSlaveI2C.State != I2C_STA_IDLE)
{
TimeCurMs = HAL_GetTick();
if(TimeCurMs >= SwSlaveI2C.StartMs)
{
TimeMs = TimeCurMs - SwSlaveI2C.StartMs;
}
else
{
TimeMs = ~(SwSlaveI2C.StartMs - TimeCurMs) + 1;
}
if(500 <= TimeMs)
{
// I2C通信超时的话,重置状态机,并把SDA设置成输入
SwSlaveI2C.State = I2C_STA_IDLE;
SET_SDA_DIR(TimeMs, GPIO_DIR_IN);
}
}
}5)软件模拟I2C从机相关功能验证代码。这里需要借助STM32的另外一个I2C主机进行配合测试。这里将PF0/PF1对应的引脚配置成I2C主机,主机直接使用STM32的硬件I2C实现。PF0/PF1分别和PB7/PB6连接,然后验证数据收发的正确性。具体代码参见上面的工程链接。这里只展示最终的测试结果数据。如下图2和图3所示。

软件模拟I2C从机状态

I2C主机发送数据

软件模拟I2C从机接收数据
图2 软件模拟I2C从机数据接收验证结果

软件模拟I2C从机状态

软件模拟I2C从机发送数据

I2C主机接收数据
图3 软件模拟I2C从机数据发送验证结果
1.5 软件模拟I2C从机的注意事项
本例程中,对于400kbps速率的I2C通信,在进行代码编译链接时,需要使用-Ofast的优化方式,以提高中断处理函数的执行速度,使程序能正确执行。如果使用默认的无优化配置,会造成程序无法正确运行。文章来源:https://www.toymoban.com/news/detail-429981.html
对于主频比较低的MCU,使用这里提供的软件模拟I2C从机进行I2C通信时,建议使用100kpbs以下的通信速率,并且注意使用可以提高代码执行速度的代码优化配置。文章来源地址https://www.toymoban.com/news/detail-429981.html
到了这里,关于STM32软件模拟I2C从机的实现方法的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!