振动(敲击)传感器
振动无处不在,有声音就有振动,哒哒的脚步是匆匆的过客,沙沙的夜雨是暗夜的忧伤。那你知道理科工程男是如何理解振动的吗?今天我们就来讲一讲本节的主角:最简单的机械式振动传感器。
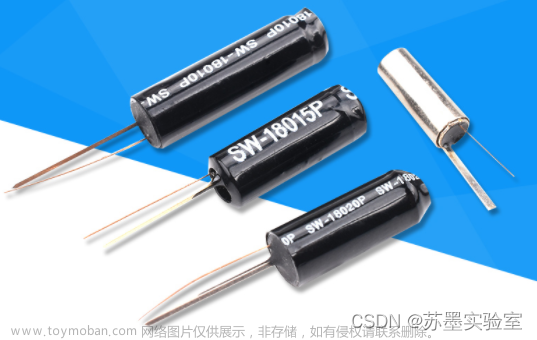
下图即为振动传感器,外形有几种,原理都相同:1个弹簧电极+1个金属电极,振动时弹簧抖动碰到紧挨的金属电极,两个电极就会瞬间接通。我们通过单片机监测两电极的通断就可以知道当前是否发生振动,振动的频率是多少。原理就这么简单,准备上手!

一、硬件准备
- 振动传感器1个,0.85元。
- STM32F103核心板一块,某宝7块9。供电线跟你的手机充电线一样。
- 面包板套件一套,某宝13.8元。不买套件,随手弄几根杜邦线也OK。
- 仿真器,某宝7.5元。


注:除了传感器以外,剩下的和其他实验共用,无需反复购买。
STM32F103核心板3.3V接面包板3.3V,GND接面包板GND;LED为板载,接口为PC13。
STM32F103核心板与振动传感器接线如下。
| 传感器引脚 | 核心板引脚 |
| S(信号输出) | PA15 |
| GND | GND |
| VCC | 3.3 |
二、软件准备
参见"STM32F1开发实例-开发环境搭建"。
三、实际效果
振动面包板,单片机侦测到传感器发出的信号,板载LED亮起1s后熄灭。
四、代码实现
项目工程源码如下:
https://download.csdn.net/download/wangpeng421/87548936主程序代码如下:
//------引用头文件
#include "main.h"
#include "delay.h"
#include "timerPwm.h"
#include "led.h"
#include "ioSensor.h"
//---------------------------
//主函数
//---------------------------
int main(void)
{
SysInit(); //系统初始化,如时钟等
UserInit(); //用户初始化,如传感器IO口等
while(1)
{
//-----高速代码执行区
ioSensorScan(); //传感器扫描引脚信号
if(ioSensor1.Status==_ON) //如果传感器被触发
{
__LED1_On(); //点亮led1
led1.Status=_ON; //将led1状态设置为ON
}
//-----中速代码执行区.单位时间100us。
if(SpeedCon_Num >= 10)//1ms进入1次
{
SpeedCon_Num=0;
if(led1.Status==_ON) //如果led1状态为ON
{
led1.onTime++; //led1点亮计时
if(led1.onTime>1000) //1s后熄灭LED
{
led1.onTime=0; //计时清零
__LED1_Off(); //熄灭led1
led1.Status=_Off; //将led1状态设置为OFF
}
}
else //led1没有亮起,则计时始终清零
led1.onTime=0;
}
}
}
传感器驱动头文件:ioSensor.h
注:此类传感器均为简单的高低电平检测,所以编入IO触发类,通用ioSensor驱动。
//===============================================
//驱动名称:IO类传感器驱动
//公司名称:
//代码编写: 苏墨 2020-05-12
//API 说明:1.头文件定义IO -> 初始化"io_SensorInit()" -> 调用"ioScan()"。
// 2.通过查询"ioSensor.Status"即可获取按键状态。按键状态值如下。
// #define _OFF 0x00 //释放
// #define _ON 0x01 //触发
// #define _LongON 0x02 //长时间触发
//其他说明:
//===============================================
#ifndef __ioSensor_H__
#define __ioSensor_H__
#include "sys.h"
//-----IO定义
#define ioSensor1_PIN GPIO_PIN_15 //传感器1
#define ioSensor1_Port GPIOA
#define ioSensor2_PIN GPIO_PIN_10 //传感器2
#define ioSensor2_Port GPIOC
#define ioSensor3_PIN GPIO_PIN_4 //传感器3
#define ioSensor3_Port GPIOC
//------IO宏
#define __Enable_ioSensor_Port() do{__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_GPIOC_CLK_ENABLE();}while(0U)
//-----结构体
struct ioSensor{
u8 onTime; //触发计时.ON
u8 offTime; //释放计时.OFF
u8 Status; //状态
u16 longOnTime; //长触发计时.LongON
};
//-----常量
#define _OFF 0x00 //释放
#define _ON 0x01 //触发
#define _LongON 0x02 //长按
//-----变量
extern struct ioSensor ioSensor1;
extern struct ioSensor ioSensor2;
extern struct ioSensor ioSensor3;
//-----函数
void ioSensorInit(); //初始化
void ioSensorScan(); //扫描
#endif
传感器驱动代码:ioSensor.c
#include "ioSensor.h"
//-----常量
//-----变量
struct ioSensor ioSensor1;
struct ioSensor ioSensor2;
struct ioSensor ioSensor3;
//-----函数声明
void ioSensorInit(); //初始化
void ioSensorScan(); //扫描
//---------------------------
//初始化
//输入参数:无
//输出参数:无
//其他说明:
//---------------------------
void ioSensorInit()
{
GPIO_InitTypeDef GPIO_Initure;
__Enable_ioSensor_Port();
GPIO_Initure.Pin=ioSensor1_PIN;
GPIO_Initure.Mode=GPIO_MODE_INPUT; //输入模式
GPIO_Initure.Pull=GPIO_PULLUP; //上拉
GPIO_Initure.Speed=GPIO_SPEED_FREQ_HIGH; //快速
HAL_GPIO_Init(ioSensor1_Port,&GPIO_Initure);
}
//---------------------------
//扫描
//输入参数:无
//输出参数:无
//其他说明:结构体将指明按键状态信息。详见.h文件。
//---------------------------
#define _OnTime 0 //触发计时.
#define _LongOnTime 1000 //长按计时.
#define _OffTime 500 //释放计时
void ioSensorScan()
{
//-----ioSensor1
if(HAL_GPIO_ReadPin(ioSensor1_Port,ioSensor1_PIN)==1)
{
ioSensor1.offTime=0;
ioSensor1.onTime++;
if(ioSensor1.onTime>_OnTime)
{
ioSensor1.onTime=_OnTime;
ioSensor1.Status=_ON;
}
}
else
{
//------------
ioSensor1.offTime++;
if(ioSensor1.offTime>_OffTime)
{
ioSensor1.onTime=0;
ioSensor1.longOnTime=0;
ioSensor1.Status=_OFF;
}
}
}
led驱动头文件:led.h文章来源:https://www.toymoban.com/news/detail-430523.html
//===============================================
//驱动名称:led驱动
//公司名称:
//代码编写: 苏墨 2020-05-12
//API 说明:1.头文件定义IO -> 初始化"ledInit()"。
// 2.通过"led.Status"查询或设置led状态。状态值如下。
// #define _OFF 0x00 //释放
// #define _ON 0x01 //触发
// 通过“__LEDx_On()、__LEDx_Off()”控制对应LED亮灭。
//其他说明:
//===============================================
#ifndef __led_H__
#define __led_H__
#include "sys.h"
//-----IO定义
#define LED1_Pin GPIO_PIN_13
#define LED1_Port GPIOC
#define LED2_Pin GPIO_PIN_14
#define LED2_Port GPIOC
//-----宏
#define __Enable_LED_Port() do{__HAL_RCC_GPIOC_CLK_ENABLE();}while(0U)
#define __LED1_On() do{HAL_GPIO_WritePin(LED1_Port,LED1_Pin,GPIO_PIN_RESET);}while(0U)
#define __LED1_Off() do{HAL_GPIO_WritePin(LED1_Port,LED1_Pin,GPIO_PIN_SET);}while(0U)
#define __LED2_On() do{HAL_GPIO_WritePin(LED1_Port,LED2_Pin,GPIO_PIN_RESET);}while(0U)
#define __LED2_Off() do{HAL_GPIO_WritePin(LED1_Port,LED2_Pin,GPIO_PIN_SET);}while(0U)
//-----结构体
struct led{
u16 onTime; //触发计时.ON
u16 OffTime; //释放计时.OFF
u8 Status; //状态
};
//-----常量
//-----变量
extern struct led led1;
//-----函数
void ledInit();
#endif
led驱动代码:led.c文章来源地址https://www.toymoban.com/news/detail-430523.html
#ifndef __led_H__
#define __led_H__
#include "sys.h"
//-----IO定义
#define LED1_Pin GPIO_PIN_13
#define LED1_Port GPIOC
#define LED2_Pin GPIO_PIN_14
#define LED2_Port GPIOC
//-----宏
#define __Enable_LED_Port() do{__HAL_RCC_GPIOC_CLK_ENABLE();}while(0U)
#define __LED1_On() do{HAL_GPIO_WritePin(LED1_Port,LED1_Pin,GPIO_PIN_RESET);}while(0U)
#define __LED1_Off() do{HAL_GPIO_WritePin(LED1_Port,LED1_Pin,GPIO_PIN_SET);}while(0U)
#define __LED2_On() do{HAL_GPIO_WritePin(LED1_Port,LED2_Pin,GPIO_PIN_RESET);}while(0U)
#define __LED2_Off() do{HAL_GPIO_WritePin(LED1_Port,LED2_Pin,GPIO_PIN_SET);}while(0U)
//-----结构体
struct led{
u16 onTime; //触发计时.ON
u16 OffTime; //释放计时.OFF
u8 Status; //状态
};
//-----常量
//-----变量
extern struct led led1;
//-----函数
void ledInit();
#endif
到了这里,关于STM32F1开发实例-振动传感器(机械)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!